# 거리 센서 (거리 측정기)
거리 센서는 지형 추적, 지형 유지 (예 : 사진 촬영을 위한 정밀 호버링), 향상된 착륙 동작(거리 지원), 규제 높이 제한 경고, 충돌 방지 등에서 사용할 수있는 거리측정 기능을 제공합니다.
이 섹션에는 PX4에서 지원하는 거리 센서(더 자세한 문서에 링크됨), 모든 거리 측정기에 필요한 일반 설정, 테스트와 시뮬레이션을 설명합니다. 보다 자세한 설정과 정보는 아래 링크(및 사이드 바)를 참고하십시오.


# 지원되는 거리 측정기
# Lidar-Lite
Lidar-Lite는 소형의 고성능 광학 원거리 거리계입니다. 센서 범위는 (5cm-40m)이며 PWM 또는 I2C 포트에 연결 가능합니다.
# MaxBotix I2CXL-MaxSonar-EZ
MaxBotix I2CXL-MaxSonar-EZ (opens new window) 범위에는 보조 이착륙 및 충돌 방지에 적합한 단거리 수중 음파 탐지기 기반의 거리계가 많습니다. I2C 포트로 연결 가능합니다.
거리계는 SENS_EN_MB12XX 매개변수로 활성화됩니다.
# Lightware LIDARs
Lightware SFxx Lidar는 드론 애플리케이션에 적합한 경량 "레이저 고도계"를 제공합니다.
PX4는 SF11/c와 SF/LW20을 지원합니다. PX4는 SF02, SF10/a, SF10/b, SF10/c 단종 모델에도 사용 가능합니다.
# TeraRanger 거리계
TeraRanger는 적외선 ToF (Time-of-Flight) 기반의 다양한 경량 거리측정 센서를 제공합니다. 일반적으로, 소나보다 더 빠르고 범위가 넓으며 레이저 기반 시스템보다 작고 가볍습니다.
PX4는 I2C 버스 타입의 다음 모델들을 지원합니다 : TeraRanger One, TeraRanger Evo 60m 및 TeraRanger Evo 600Hz.
# Ainstein US-D1 Standard Radar Altimeter
Ainstein US-D1 표준 레이더 고도계는 UAV에 최적화된 소형 마이크로파 거리계입니다. 감지 범위는 약 50m입니다. 이 제품의 특별한 장점은 모든 기상 조건과 모든 지형 유형(물 포함)에서 잘 작동하는 것입니다.
# LeddarOne
LeddarOne </ 0>은 좁지만 확산 빔이있는 소형 Lidar 모듈로, 견고하고 신뢰할 수 있으며, 비용 효율적인 패키지로 우수한 감지 범위를 제공합니다. 감지 범위는 1cm ~ 40m이며 UART/직렬 버스로 연결합니다.
# TFmini
Benewake TFmini Lidar는 12m 범위의 작고 저렴한 저전력 LIDAR입니다.
# PSK-CM8JL65-CC5
Lanbao PSK-CM8JL65-CC5 ToF 적외선 거리측정 센서는 0.17m-8m 범위와 밀리미터 분해능을 가진 매우 작은 (38mm x 18mm x 7mm, <10g) IR 거리 센서입니다. UART/직렬 버스에 연결하여야합니다. <10g) IR distance sensor with a 0.17m-8m range and millimeter resolution. It must be connected to a UART/serial bus.
# Avionics Anonymous UAVCAN Laser Altimeter Interface
Avionics Anonymous UAVCAN Laser Altimeter Interface는 여러 개의 일반거리계(예 : Lightware SF11/c, SF30/D 등)들을 I2C보다 더 강력한 인터페이스인 UAVCAN 버스에 연결할 수 있습니다.
# 설정
거리계는 일반적으로 직렬 (PWM) 또는 I2C 포트 (장치 드라이버에 따라 다름)에 연결되며, 특정 매개변수로 포트에서 활성화됩니다.
각 거리 센서에 특정한 하드웨어와 소프트웨어 설정은 개별 주제에서 설명합니다.
물리적 설정과 사용법에 관한 모든 거리 센서에 공통적인 설정 방법은 다음과 같습니다.
# 일반 설정
일반적인 거리계 설정은 EKF2*RNG** 매개변수를 사용합니다. 여기에는 아래의 내용들이 포함됩니다.
- EKF2_RNG_POS_X, EKF2_RNG_POS_Y, EKF2_RNG_POS_Z - 기체 무게 중심에서 X, Y, Z 방향의 오프셋
- EKF2_RNG_PITCH - 0도 (기본값) 값은 기체 수직 축 (즉, 아래로 똑바로 아래)에 정확히 정렬된 거리 측정기에 해당하고, 90도는 거리 측정기가 앞을 향하고 있음을 나타냅니다. 0이 아닌 피치가 사용되는 경우 간단한 삼각법을 사용하여 지면까지의 거리를 계산합니다.
- EKF2_RNG_DELAY - 센서에서 추정기에 도달하는 데이터의 대략적인 지연.
- EKF2_RNG_SFE - 범위 파인더 범위 종속 노이즈 스케일러.
- EKF2_RNG_NOISE - 거리 측정기 융합을 위한 측정 노이즈
# 시험
거리계를 테스트하는 가장 간편한 방법은 범위를 변경하고 PX4에서 감지된 값과 비교하는 것입니다. 아래 섹션에서는 측정 범위를 재는 몇 가지 방법을 설명합니다.
# QGroundControl 분석 툴
QGroundControl 분석 도구와 QGroundControl MAVLink Inspector를 사용하여거리계의 DISTANCE_SENSOR 정보를 포함하여 기체에서 보낸 메시지를 조회할 수 있습니다. 도구 간의 주요 차이점은 분석 도구에서 그래프를 지원하는 점입니다.
Note
전송되는 메시지는 차량 설정에 따라 달라집니다. 연결된 기체에 거리계가 설치되어 있고, 센서 값을 게시하는 경우에만 DISTANCE_SENSOR 메시지가 표시됩니다.
거리계 출력을 보려면 :
위젯 > 분석 메뉴를 오픈합니다.
DISTANCE_SENSOR.current_value메시지를 선택합니다. 그러면, 도구가 결과를 플로팅합니다.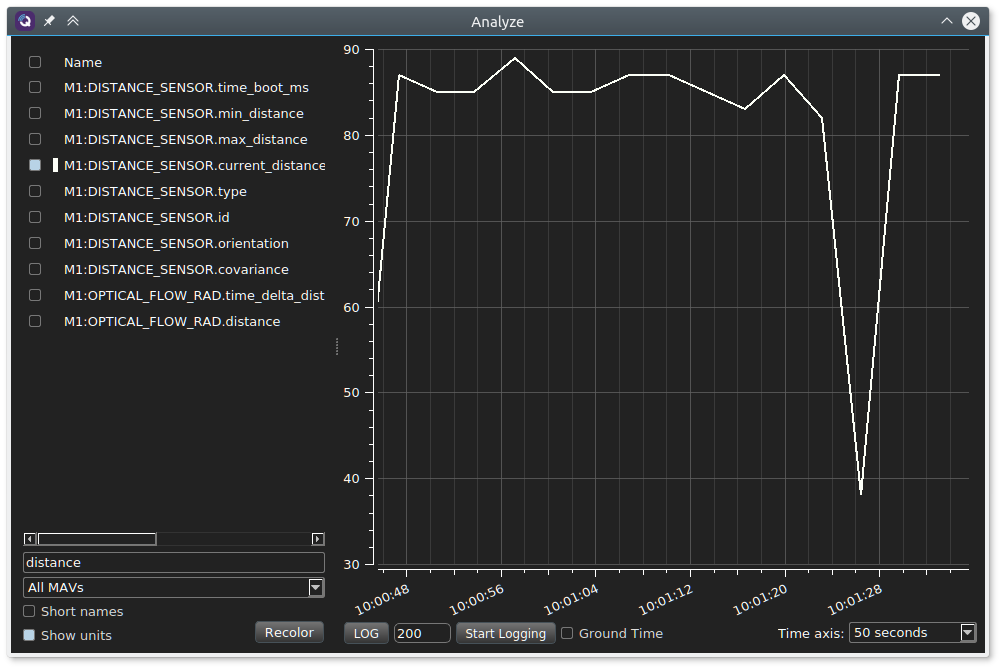
# QGroundControl MAVLink Console
QGroundControl MAVLink Console을 사용하여 distance_sensor uORB 토픽을 관찰할 수 있습니다.
listener distance_sensor 5
Note
QGroundControl MAVLink Console은 Pixhawk 또는 다른 NuttX 타겟에 연결시 작동하지만 ,시뮬레이터에는 연결되지 않습니다. 시뮬레이터에서는 터미널에서 직접 명령을 실행할 수 있습니다.
자세한 내용은 개발 > 디버깅/로깅 > 리스너 명령을 사용한 센서/토픽 디버깅을 참고하십시오.
# 시뮬레이션
Lidar 및 소나 거리계는 Gazebo Simulator에서 사용할 수 있습니다. 이렇게 하려면, 거리계가 포함된 기체 모델을 사용하여 시뮬레이터를 시작하여 합니다.
광류 모델에는 Lidar 거리계가 포함됩니다.
make px4_sitl gazebo_iris_opt_flow
typhoon_h480에는 소나 거리계가 포함되어 있습니다.
make px4_sitl gazebo_typhoon_h480
다른 기체를 사용하는 경우에는 설정 파일에 모델을 포함할 수 있습니다. 각각의 Iris 및 Typhoon 설정 파일에서 방법을 확인할 수 있습니다.
iris_opt_flow.sdf (opens new window) xml
model://lidar -0.12 0 0 0 3.1415 0 lidar::link iris::base_link 0 0 1 0 0 typhoon_h480.sdf (opens new window) xml
model://sonar sonar_model::link typhoon_h480::base_link 0 0 1 0 0