# ARK Flow
ARK Flow는 오픈 소스 UAVCAN 광류, 거리 센서 및 IMU 모듈입니다.

# 구매처
이 모듈을 아래에서 주문하십시오.
# 사양
- 오픈 소스 회로도와 BOM (opens new window)
- PX4 오픈 소스 펌웨어 (opens new window) 실행
- UAVCAN 펌웨어 업데이트 지원
- 동적 UAVCAN 노드 열거
- 센서
- PixArt PMW3901 광류 센서
- 9lux 이상의 매우 낮은 조명 조건에서 트랙
- 80mm에서 무한대까지 넓은 작업 범위
- 최대 7.4 rad/s
- 저조도 작동 개선을 위해 40mW IR LED 내장
- Broadcom AFBR-S50LV85D 비행시간 거리 센서
- 통합 850nm 레이저 광원
- 12.4 x 6.2°의 시야각 (FoV), 32 픽셀
- 최대 30m의 일반적인 거리 범위
- 최대 200k Lux 주변 조명 작동
- 모든 표면 조건에서 잘 작동
- 1~3 픽셀 사이를 비추는 2° x 2°의 송신기 빔
- Bosch BMI088 6축 IMU
- STM32F412CEU6 MCU
- Pixhawk 표준 CAN 커넥터 2 개
- 4 핀 JST GH
- Pixhawk 표준 디버그 포트
- 6 핀 JST SH
- 소형 폼 팩터
- 3cm x 3cm x 1.4cm
- LED 표시기
- 미국에서 제작
# 배선
ARK Flow는 Pixhawk 표준 4 핀 JST GH 케이블을 사용하여 CAN 버스에 연결됩니다. 추가 센서를 ARK Flow의 두 번째 CAN 커넥터에 연결하여 여러 센서를 연결할 수 있습니다.
UAVCAN 배선 방법은 UAVCAN > 배선을 참고하십시오.
# 장착 및 방향
권장 장착 방향은 다음 그림과 같이 보드의 커넥터가 차량 뒷면을 향하는 것입니다.
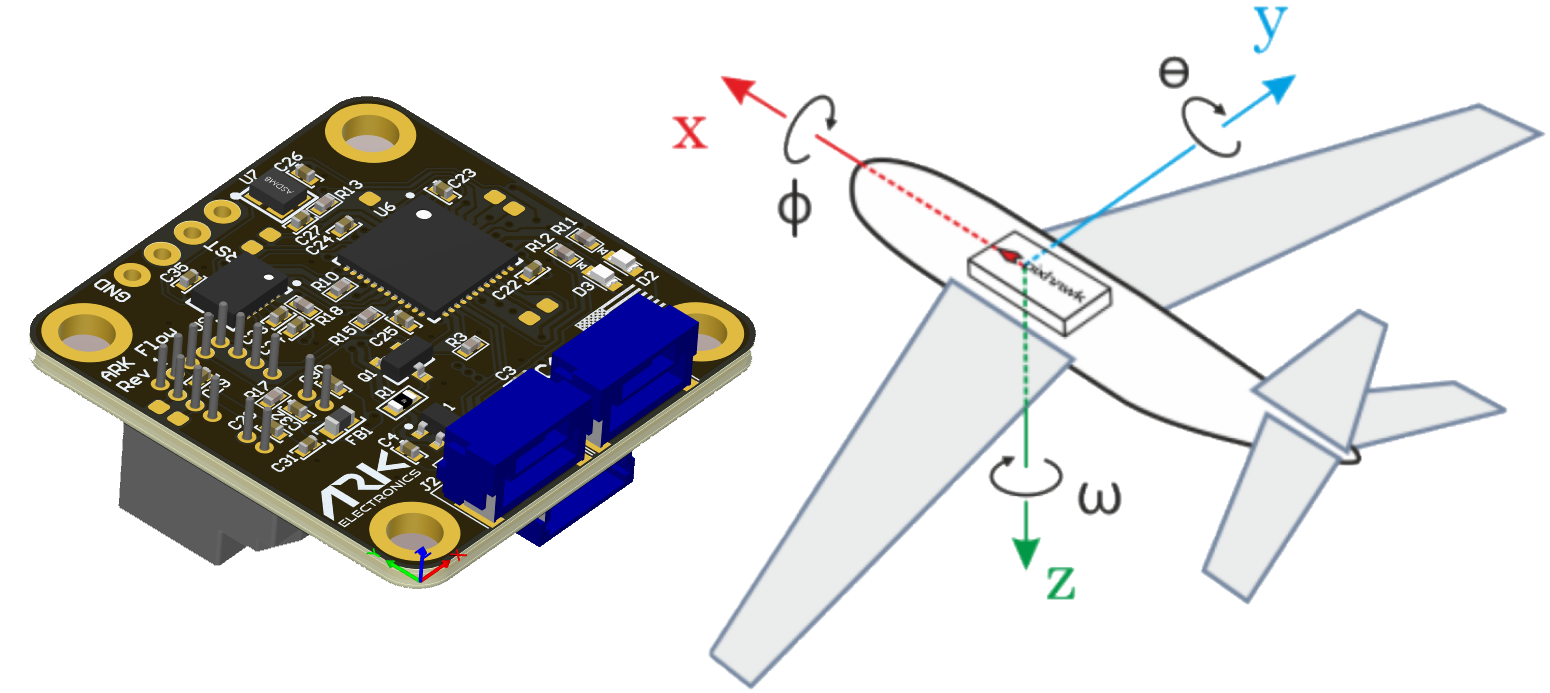
이는 매개변수 SENS_FLOW_ROT의 기본값 (0)에 해당합니다. 다른 방향을 사용시에는 매개변수를 적절하게 변경하십시오.
센서는 프레임의 어느 곳에 나 장착할 수 있지만, PX4 설정 중에 차량 무게 중심을 기준으로 초점 위치를 지정하여야 합니다.
# PX4 설정
# UAVCAN 활성화
ARK Flow 보드를 사용하려면 Pixhawk CAN 버스에 연결하고 동적 노드 할당을 위해 매개변수 UAVCAN_ENABLE을 2로 설정하여 UAVCAN 드라이버를 활성화합니다 (또는 <a href="../uavcan/escs.md">UAVCAN ESC</a>를 사용하는 경우 3).
단계는 아래와 같습니다:
- QGroundControl에서 매개변수 UAVCAN_ENABLE을
2또는3로 설정하고 재부팅합니다 (매개 변수 찾기 / 업데이트 참조). - ARK Flow CAN을 Pixhawk CAN에 연결합니다.
활성화되면 부팅시 모듈이 감지됩니다. 유량 데이터는 10Hz에 도달하여야 합니다.
# PX4 설정
Optical Flow > 추정기 > EKF2 에서 EKF 광류 매개변수를 설정합니다.
- 속도 계산을 위해 광류 측정을 융합할 수 있습니다.
- 센서가 차량 중앙에 있지 않은 경우 오프셋을 정의합니다.
또한 다음의 매개변수들을 설정할 수 있습니다.
| 매개변수 | 설명 |
|---|---|
| SENS_FLOW_MAXHGT | 광학 흐름에 의존시 지상 최대 높이. |
| SENS_FLOW_MINHGT | 광학 흐름에 의존시 지상 최소 높이. |
| SENS_FLOW_MAXR | 광류 센서로 안정적으로 측정 기능한 최대 각 유량. |
| SENS_FLOW_ROT | 차체 프레임을 기준으로 한 보드의 요 회전. |
# Ark Flow 펌웨어 빌드
Ark Flow는 최신 펌웨어로 빌드되어 판매됩니다. 최신 버전으로 업데이트하는 개발자는 일반 PX4 도구 모음 및 소스를 사용하여 직접 빌드하고 설치할 수 있습니다.
단계는 아래와 같습니다:
- PX4 도구 모음을 설치합니다.
- git을 사용하여 Ark Flow를 포함한 PX4-Autopilot 소스를 복제합니다.
git clone https://github.com/PX4/PX4-Autopilot --recursive cd PX4-Autopilot - Ark Flow 펌웨어를 빌드합니다.
make ark_can-flow - XX-X.X.XXXXXXXX.uavcan.bin이라는 build/ark_can-flow_default에 있는 바이너리를 사용하여 UAVCAN 펌웨어 업데이트에 대한 지침을 따르십시오.
# 비디오
@유튜브 (opens new window) <!-PX4 Optical Flow Position Hold가있는 ARK Flow : 20210605-> 속도 추정을 위해 ARK Flow 센서를 사용한 PX4 고정 위치(위치 모드에서)