# UAVCAN ESC (모터 컨트롤러)
PX4는 UAVCAN ESC를 지원합니다. PWM ESC와 비교하여 다음과 같은 장점들이 있습니다.
- UAVCAN은 비교적 장거리에도 강력하고 안정적인 연결을 제공하도록 설계되었습니다. 더 큰 기체에서 ESC를 안전하게 사용하고, 통신 이중화가 가능합니다.
- 버스는 양방향이므로, 상태 모니터링과 진단이 가능합니다.
- 모든 ESC 및 기타 UAVCAN 주변 장치를 연결하기 위한 단일 버스를 가질 수 있으므로, 배선이 비교적 간단합니다.
- (대부분의 UAVCAN ESC 유형의 경우) 각 모터를 수동으로 회전하여 ESC 번호 지정을 구성하면 설정이 더 용이합니다.


# PX4 지원 ESC
PX4는 모든 UAVCAN ESC와 호환됩니다 (UAVCAN은 일반적으로 플러그 앤 플레이 프로토콜을 의미합니다).
Note
작성 당시 PX4는 UAVCAN v0.x (v1.0 아님)를 지원합니다.
설정 관점에서 UAVCAN ESC의 유일한 차이점은 모터 순서와 방향을 구성하는 커넥터와 소프트웨어가 다를 수 있다는 것입니다.
널리 사용되는 UAVCAN ESC 펌웨어/제품은 다음과 같습니다.
- Sapog (opens new window) 펌웨어; 전기 무인 기체의 추진 시스템에 사용하도록 설계된 고급 오픈 소스 센서리스 PMSM/BLDC 모터 컨트롤러 펌웨어입니다.
- Mitochondrik (opens new window) - 통합 센서리스 PMSM/BLDC 모터 컨트롤러 칩 (ESC 및 통합 드라이브에 사용)
- Myxa (opens new window) - 경량 무인 항공기 및 선박용 고급 PMSM/BLDC 모터 컨트롤러 (FOC ESC).
- VESC 프로젝트 ESC (opens new window) (Benjamin Vedder의 블로그 (opens new window) - 프로젝트 소유자 참조)
- OlliW의 UC4H ESC - 액추에이터 노드 (opens new window)
- 그 외 다수가 여기에 기술 (opens new window)되어 있습니다.
Note
이 목록은 완전하지 않습니다. 다른 ESC를 알고 있으시면, 목록에 추가하십시오!
# 구매
Sapog 기반 ESC:
Mitochondrik 기반 드라이브 및 ESC:
Note
다른 상용 ESC가 많이 있습니다. 새 링크를 찾으면 추가하십시오!
# 배선
모든 온보드 UAVCAN 장치를 체인에 연결하고, 버스가 끝 노드에서 종료되었는 지 확인합니다. ESC가 연결/체인 순서는 중요하지 않습니다.
자세한 정보는 UAVCAN > 배선을 참고하십시오.
Note
모든 UAVCAN ESC는 동일한 연결 아키텍처를 공유하며 동일한 방식으로 연결됩니다. 그러나, 실제 커넥터는 다릅니다 (예 : Zubax Orel 20 및 Holybro Kotleta20은 Dronecode 표준 커넥터 (JST-GH 4 핀)를 사용하지만 VESC는 사용하지 않음).
# PX4 설정
PX4에서 UAVCAN ESC를 사용하려면 UAVCAN 드라이버를 활성화하여야 합니다.
- 배터리에서 기체에 전원을 공급하고 (비행 콘트롤러뿐만 아니라 전체 기체에 전원을 공급하여야 함) QGroundControl을 연결합니다.
- 기체 설정 > 매개 변수 화면으로 이동합니다. :::note 매개변수에서 매개변수를 검색/설정 방법을 설명합니다. :::
- UAVCAN_ENABLE을 센서 및 모터 (3) 값으로 설정후, 비행 콘트롤러를 재부팅합니다. 이렇게 하면 다음 섹션에 설명대로 모터(ESC)의 자동 열거가 가능합니다.
- (선택 사항) UAVCAN_ESC_IDLT를 1로 설정하여 시스템이 준비된 동안 모터가 항상 최소한 유휴 스로틀에서 실행되도록 합니다. :::note 일부 시스템은이 동작의 장점을 사용하지 못합니다 (예: 글라이더 드론). :::
# ESC 설정
UAVCAN 장치는 일반적으로 플러그 앤 플레이이지만, 시스템에 사용된 각 ESC를 열거 (번호)하고 PX4에서 식별/제어하도록 방향을 설정하여야 합니다.
ESC
색인과 방향은 기체 유형에 대한 기체 정의서와 일치/매핑되어야 합니다. 0-7의 ESC 인덱스는 MAIN 1-8에 매핑되고, ESC 인덱스 8-15는 AUX 1-8에 매핑됩니다.
UAVCAN ESC의 각 유형을 열거하는 메커니즘은 다릅니다 (ESC 설명서를 참고하십시오). 일부 UAVCAN ESC에 대한 설정 정보는 다음과 같습니다.
# QGroundControl을 사용한 Sapog ESC 열거
이 섹션에서는 QGroundControl을 사용하여 Sapog 기반 (opens new window) 기반 ESC를 "자동으로" 열거하는 방법을 설명합니다.
ESC
색인이 기본적으로 이미 0으로 설정되어 있으므로, 설정에 ESC가 하나만 있는 경우에는 이 섹션을 건너 뛸 수 있습니다.
ESC를 열거하려면:
배터리로 기체에 전원을 공급하고 QGroundControl에 연결합니다.
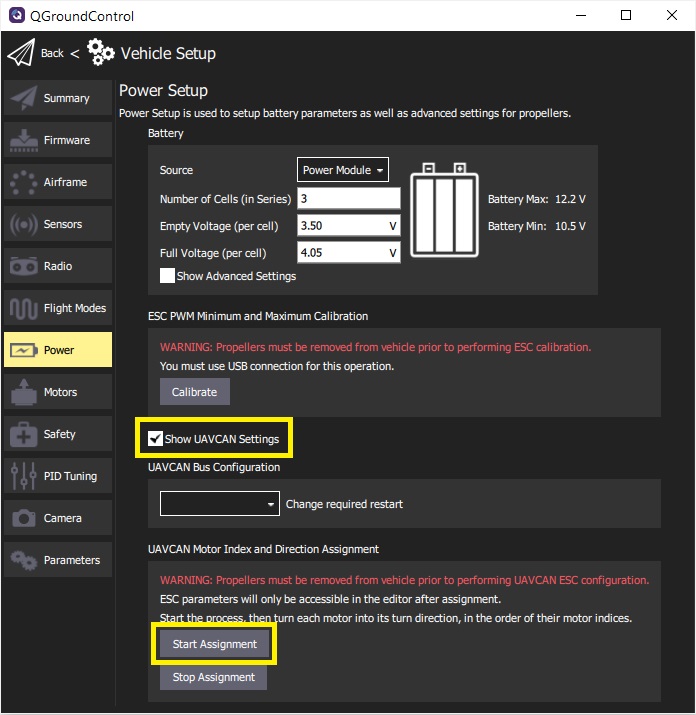
기체 설정 > QGC 전력 화면으로 이동합니다.
아래 스크린 샷과 같이 Start Assignment 버튼을 눌러서, ESC 자동 열거 프로세스를 시작합니다.
비행 컨트롤러가 ESC 열거 모드에 진입한 소리가 들립니다.
첫 번째 모터에서 시작하여 마지막 모터로 마무리하면서 각 모터를 올바른 회전 방향 (Airframe Reference에 지정된대로)으로 수동으로 돌립니다. 모터를 돌릴 때마다 확인음이 들려야합니다.
ESC가 자동으로 방향을 학습하고 기억하므로 각 모터를 올바른 방향으로 돌리십시오 (즉, 정상 작동 중에 시계 방향으로 회전하는 모터도 열거 중에 시계 방향으로 돌려야 함).
:::
- 마지막 모터가 열거된 후에는 열거 절차가 완료되었음을 알리는 확인 소리가 변경되어야합니다.
- PX4와 Sapog ESC를 재부팅하여 새 열거 ID를 적용합니다.
다음 비디오는 프로세스를 보여줍니다.
# Sapog를 사용한 수동 ESC 열거
TIP
수동 열거보다는 위에 표시된 자동화된 Sapog ESC 열거를 권장합니다 (더 쉽고 안전하기 때문입니다).
UAVCAN GUI 도구 (opens new window)를 사용하여 ESC 색인과 방향을 수동으로 설정할 수 있습니다. 이렇게하면 열거된 각 ESC에 대하여, 다음 Sapog 설정 매개변수가 할당됩니다.
esc_indexctl_dir
Note
매개변수에 대한 자세한 내용은 Sapog 설명서 (opens new window)를 참조하십시오.
# Myxa ESC 설정
Myxa Telega 기반 ESC (opens new window)에 대한 모터 열거는 일반적으로 Kucher 도구 (opens new window) (또는 덜 "GUI 친화적"인 UAVCAN GUI 도구 (opens new window))를 사용합니다.
여기에 몇 가지 지침이 있습니다. Myxa v0.1 빠른 시작 가이드 (opens new window) (Zubax 블로그).
# VESC ESC 설정
VESC ESC (opens new window)의 경우 모터 열거에 선호되는 도구는 VESC 도구 (opens new window)입니다. VESC 도구에서 설정하는 일반 모터 설정 외에도 앱 구성을 올바르게 설정하여야 합니다. 권장되는 앱 설정은 다음과 같습니다.
| 매개변수 | 옵션 |
|---|---|
| 사용할 앱 | No App |
| VESC ID | 1,2,... |
| Can Status Message Mode | CAN_STATUS_1_2_3_4_5 |
| CAN Baud Rate | CAN_BAUD_500K |
| CAN Mode | UAVCAN |
| UAVCAN ESC Index | 0,1,... |
VESC ID는 PX4 규칙과 동일한 모터 번호를 가져야합니다. 오른쪽 상단 모터의 경우 1, 왼쪽 하단 모터의 경우 2에서 시작합니다. 그러나, UAVCAN ESC 인덱스는 0에서 시작하므로 항상 VESC ID보다 낮은 인덱스입니다. 예를 들어, 쿼드 콥터에서 왼쪽 하단 모터는 VESC ID=2 및 UAVCAN ESC Index=1입니다.
마지막으로 CAN Baud Rate는 UAVCAN_BITRATE에 설정된 값과 일치하여야 합니다.
# 문제 해결
# 시동시 모터가 회전하지 않음
PX4 펌웨어 암이 회전하지만 모터가 회전을 시작하지 않는 경우, UAVCAN ESC를 사용하려면 매개 변수 UAVCAN_ENABLE=3을 확인하십시오. 추력이 증가하기 전에 모터가 회전을 시작하지 않으면 UAVCAN_ESC_IDLT=1을 확인하십시오.
# UAVCAN 장치가 노드 ID를 얻지 못함 / 펌웨어 업데이트 실패
PX4는 UAVCAN 노드 할당 및 펌웨어 업데이트 (부팅 중에 발생)를 위해 SD 카드가 필요합니다. (작동하는) SD 카드가 있는 지 확인하고 재부팅하십시오.
# 추가 정보
- PX4/Sapog (opens new window) (Github)
- Sapog v2 설명서 (opens new window)
- UAVCAN 장치 상호 연결 (opens new window) (Zubax KB)
- PX4와 함께 Sapog 기반 ESC 사용 (opens new window) (Zubax KB)
← PWM ESC와 서보 DShot ESC →