# 手动/自稳模式(多旋翼)


手动/自稳 模式在当遥控摇杆居中时可稳定多旋翼无人机。 要手动飞无人机,您可以移动摇杆使其偏离居中位置。
如果设置 手动 或 自稳 模式,则启用该多旋翼模式。 :::
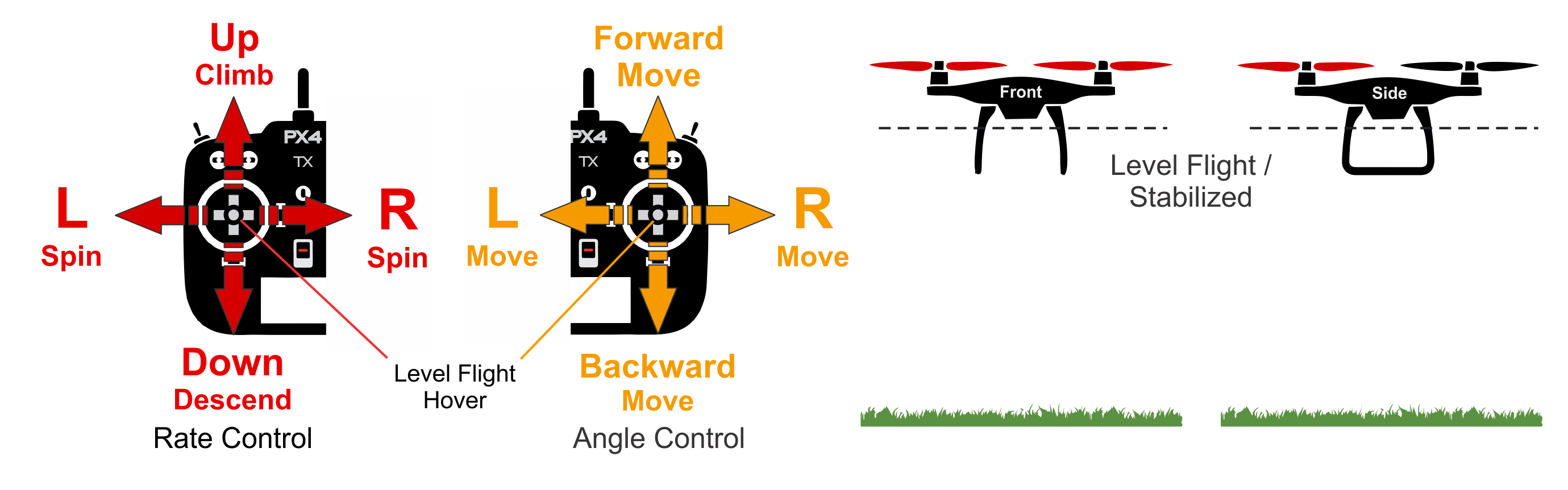
在手动控制下,横滚和俯仰摇杆控制无人机围绕各个轴的角度(姿态),横滚摇杆控制水平面上方的旋转速率,油门控制高度 / 速度。
一旦释放摇杆,它们将会返回中心死区。 一旦横滚和俯仰摇杆居中,多旋翼无人机将平稳并停止运动。 然后飞机将悬停在适当的位置/保持高度 - 前提是平衡得当,油门设置适当(参见下面),并且没有施加任何外力(例如风)。 飞行器将朝着任何风的方向漂移,您必须控制油门以保持高度。
# 技术描述
飞手的输入通过横滚和俯仰角度以及偏航角速率指令传递给自驾仪。 油门被重新调节(参见下面的)并直接传递到输出混控器。 自动驾驶仪控制着姿态,这意味着当遥控器摇杆居中时,自驾仪调整飞机的横滚和俯仰角为零(从而实现飞机姿态的改平)。 自动驾驶仪不能补偿由于风(或其他来源)引起的漂移。
注解
- 需要手动输入(遥控器,或者通过 MAVLink 连接的游戏手柄/拇指摇杆)。
# 参数
| 参数 | 描述 |
|---|---|
| MPC_THR_HOVER | 当油门杆居中并且MPC_THR_CURVE设置为默认值时输出的悬停油门。 |
| MPC_THR_CURVE | 定义油门比例。 默认情况下,此值设置为重新调节至悬停推力,这意味着当油门杆居中时,输出配置的悬停油门(MPC_THR_HOVER),并且摇杆输入会重新线性调整低于和高于此值(允许在自稳模式和高度/位置控制模式之间平滑过渡)。 |
在功率大的飞机上,悬停油门可能非常低(例如低于 20%),因此重新调整会使油门输入变形 - 即此处 80% 的推力将仅由摇杆输入的上半部分控制,20% 的推力由底部的来控制。 如果需要,可以将MPC_THR_CURVE设置为No Rescale(无需重新调整),不进行重新调整(油门映射的操纵杆输入独立于MPC_THR_HOVER)。 |