# PX4 Vision Autonomy 개발 키트
PX4 Vision Autonomy 개발 키트 (opens new window)는 자율 비행 컴퓨터 비전 개발을 위한 견고하고 저렴한 키트입니다.

이 키트에는 Pixhawk 4 비행 컨트롤러, UP Core 보조 컴퓨터(4GB 메모리와 64GB eMMC), 후두부 구조 코어 깊이 카메라 센서가 장착된 거의 즉시 비행 가능한 탄소 섬유 쿼드 콥터가 포함되어 있습니다.
Note
이 제품에는 사전 설치된 소프트웨어가 없습니다. PX4/Avoidance 로컬 플래너 소프트웨어의 참조 구현이 포함된 사전 이미지화 된 USB 스틱은 Auterion에서 제공합니다. 이 소프트웨어는 PX4 Vision Autonomy Kit로 수행 가능 작업에 대한 매우 기본적인 예제들을 제공합니다. 개발자는이 키트를 사용하여 PX4 회피 (opens new window) 프로젝트에서 제공하는 다른 기능을 시험해보고, 기존 코드를 수정하거나, 새로운 컴퓨터 비전 기능을 실험할 수 있습니다.
이 가이드는 기체 비행 준비에 필요한 최소한의 추가 설정을 설명합니다(RC 시스템과 배터리 설치). 또한 처녀 비행과 컴퓨터 비전 코드 수정 방법을 설명합니다.
# 구매처
# Px4 비전 가이드 콘텐츠
# 경고와 알림
- 이 키트는 전방 카메라를 사용하는 컴퓨터 비전 프로젝트용입니다. 하향 또는 후방 깊이 카메라가 없습니다. 따라서, 추가 수정없이는 안전 착륙 또는 하방향 카메라가 필요한 다른 기능들을 테스트할 수 없습니다.
- 임무에서 장애물 회피는 GPS를 사용시에 테스트 가능합니다. 임무 수행시에는 GPS 좌표를 사용합니다. 충돌 방지는 GPS와 광학 흐름에서 위치 잠금시에 위치 모드에서 테스트할 수 있습니다.
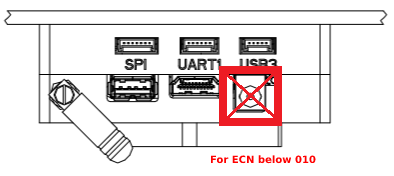
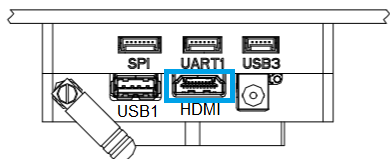
USB1로 표시된 포트는 USB3 주변 장치와 동시에 사용하는 경우에는 GPS를 방해할 수 있습니다(임무를 포함한 GPS 종속 기능 비활성화). 이로 인하여, 부팅 이미지가 USB2.0 메모리 스틱으로 제공됩니다.- ECN 010 이상의 PX4 Vision(캐리어 보드 RC05 이상), UP Core는 DC 플러그 또는 배터리로 전원을 공급할 수 있습니다.

ECN이 RC04 아래 010/캐리어 보드 미만인 PX4 Vision의 경우 *UP Core*는 배터리로 전원을 공급하여야합니다. *UP Core 전원* 소켓 안전 커버를 제거하지 마십시오.
# 내부 내용
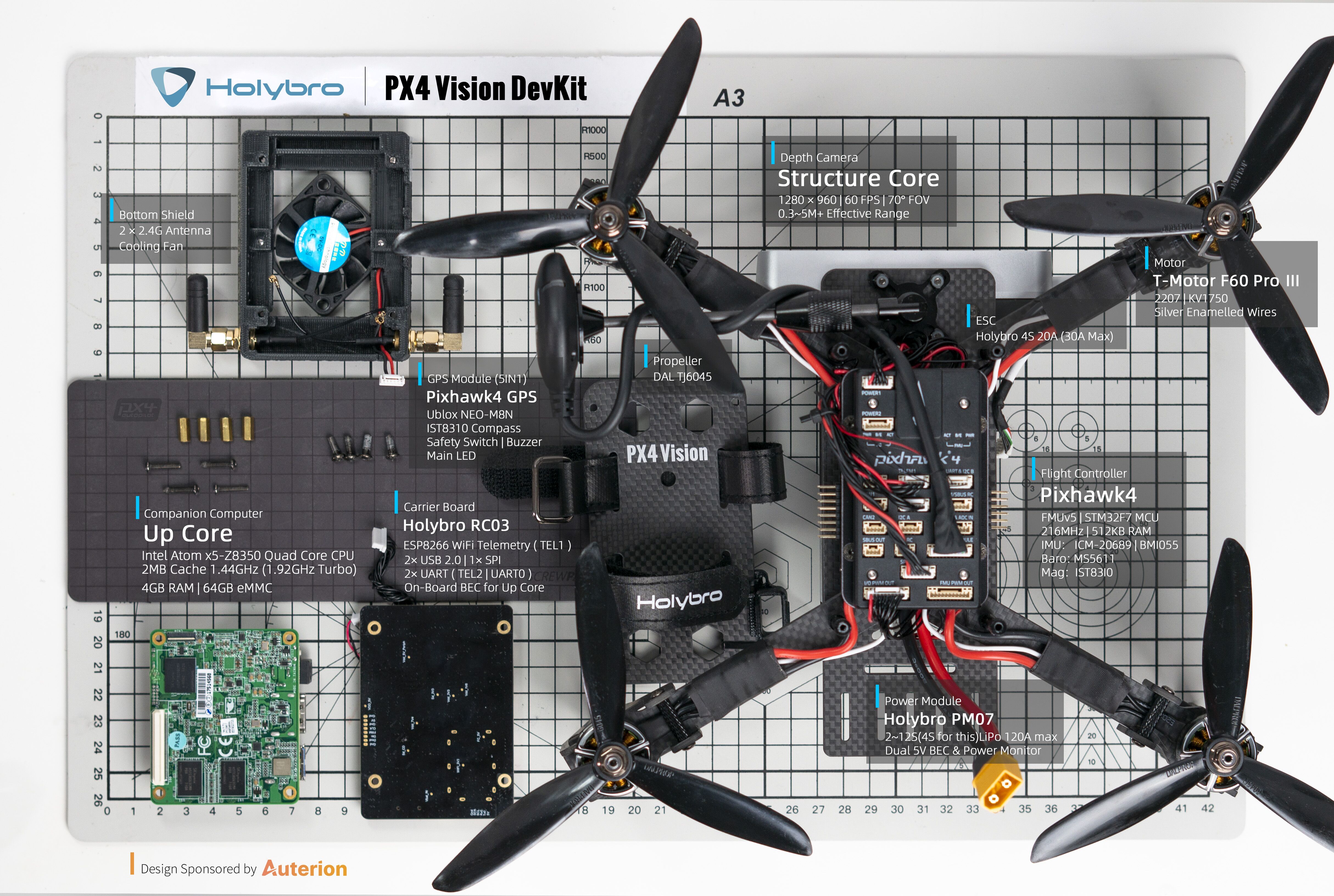


PX4 Vision DevKit에는 아래의 내용물들이 포함되어 있습니다.
핵심 구성 요소:
- 1x Pixhawk 4 비행 컨트롤러(사용자 지정 PX4 펌웨어 포함)
- 1x PMW3901 광학 유량 센서
- 1x TOF 적외선 거리 센서 (PSK‐CM8JL65‐CC5)
- 1x 구조 코어 깊이 카메라
- 160도 와이드 비전 카메라
- 스테레오 적외선 카메라
- 온보드 IMU
- 강력한 NU3000 멀티 코어 깊이 프로세서
- 1x UP Core 컴퓨터 (4GB 메모리 및 64GB eMMC, Ubuntu 및 PX4 회피 기능)
- Intel® Atom ™ x5-z8350 (최대 1.92GHz)
- 호환 OS : Microsoft Windows 10 정식 버전, Linux (ubilinux, Ubuntu, Yocto), Android
- 비행 컨트롤러에 연결된 FTDI UART
USB1: USB3.0 USB2.0 스틱에서 PX4 회피 환경을 부팅용 포트입니다(USB3.0 주변 장치를 연결하면 GPS 장애 발생할 수 있음).USB2: JST-GH 커넥터의 USB2.0 포트. 두 번째 카메라, LTE 등에 사용할 수 있습니다. (또는 개발용 키보드 / 마우스).USB3: 깊이 카메라에 연결된 USB2.0 JST-GH 포트HDMI: HDMI 출력- SD 카드 슬롯
- WiFi 802.11 b/g/n @ 2.4GHz (외부 안테나 #1에 연결됨). 컴퓨터 인터넷 액세스와 업데이트를 위하여 홈 WiFi 네트워크에 액세스할 수 있습니다.
기계적 사양 :
- 프레임 : 전체 5mm 3k 탄소 섬유 능직
- 모터 : T-MOTOR F60 PROⅢ KV1750
- ESC : BEHEli-S 20A ESC
- 프로펠러 : T6045
- GPS : Pixhawk4 GPS 모듈
- 전원 모듈 : Holybro PM07
- 축거 : 286mm
- 중량 : 854g (배터리 또는 소품 제외)
- 텔레메트리 : 비행 컨트롤러에 연결된 ESP8266 (외부 안테나 #2에 연결됨). 지상국에 대한 무선 연결을 활성화합니다.
Auterion에서 제공하는 아래의 번들들이 사전 플래시된 소프트웨어가 포함된 USB2.0 스틱 :
- Ubuntu 18.04 LTS
- ROS Melodic
- 후두 구조 코어 ROS 드라이버
- MAVROS
- PX4 회피 기능 (opens new window)
다양한 케이블, 8x 프로펠러, 2x 배터리 스트랩 (설치됨) 및 기타 액세서리 (추가 주변 장치 연결용으로 사용할 수 있음).
# 그 외 필요한 것
이 키트에는 별도로 구매하여야 하는 배터리와 무선 제어 시스템을 제외한 필수적인 드론 하드웨어들이 포함되어 있습니다.
- 배터리:
- XT60 암 커넥터가있는 4S LiPo
- 길이 115mm 미만 (전원 커넥터와 GPS 마스트 사이에 맞음)
- 무선 제어 시스템
- 모든 PX4 호환 RC 시스템을 사용할 수 있습니다.
- R-XSR 수신기가 있는 FrSky Taranis 송신기는 많이 사용되는 설정입니다.
- H2.0 Hex 키 (RC 수신기를 연결할 수 있도록 상단 플레이트 나사를 푸는 용도)
또한, 사용자는 지상국 하드웨어와 소프트웨어가 필요합니다.
- QGroundControl (opens new window)(QGC)을 실행 노트북 또는 태블릿.
# 최초 설정
기체에 RC 호환 수신기를 부착합니다 (키트와 함께 제공되지 않음).
- H2.0 육각 도구를 사용하여 상단 플레이트 (배터리가가는 곳)를 분리합니다.
- 수신기를 비행 컨트롤러에 연결합니다.
- 상단 플레이트를 다시 부착합니다.
- RC 수신기를 기체 후면의 UP Core 캐리어 보드 플레이트에 장착합니다 (지퍼 또는 양면 테이프 사용).
- 안테나에 장애물이 없는 지, 프레임에서 전기적으로 절연되어 있는지 확인합니다 (예 : 캐리어 보드 아래 또는 기체 팔 또는 다리에 고정).
RC 지상 및 공중 유닛을 바인딩합니다 (아직 수행하지 않은 경우). 바인딩 절차는 사용된 무선 시스템에 따라 다릅니다 (수신기 설명서 참조).
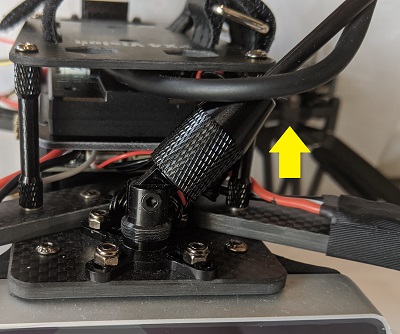
GPS 마스트를 수직 위치로 올리고 덮개를 베이스 플레이트의 홀더에 조입니다.
키트에서 사전 이미징된 USB2.0 스틱을
USB1(아래 강조 표시됨)이라고 표시된 UP Core 포트에 삽입합니다.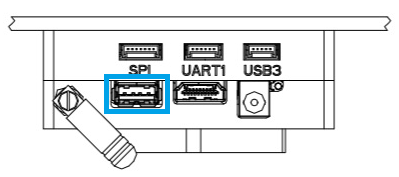
완전히 충전된 배터리로 기체의 전원을 공급하십시오. :::note 배터리를 연결하기 전에 프로펠러가 제거되었는 지 확인하십시오. :::
아래의 로그인 정보를 사용하여 지상국을 기체 WiFi에 연결합니다 (몇 초 후).
- SSID: pixhawk4
- 비밀번호: pixhawk4
TIP
연결 후(원하는 경우), 웹 브라우저에서 URL http://192.168.4.1을 열어 WiFi 네트워크 SSID, 암호 및 기타 로그인 정보를 변경할 수 있습니다. 전송 속도 921600을 변경하지 마십시오.
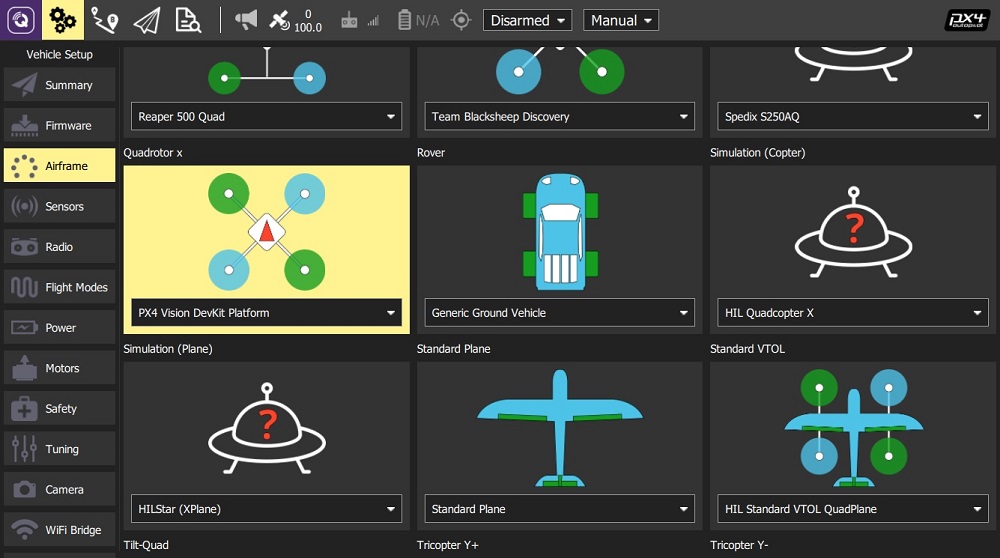
- 지상국에서 QGroundControl을 시작합니다.
- 차량 설정 및 보정 :
Note
기체는 사전 보정된 상태로 수령하여야합니다 (예 : 펌웨어, 기체, 배터리 및 센서가 모두 설정됨). 그러나, 방금 연결한 무선 시스템을 보정하여야 하며, 나침반 보정을 다시 수행하여야 하는 경우가 많습니다.
- (선택 사항) 조종기에서 비행 모드 선택 스위치를 설정합니다.
Note
모드는 QGroundControl을 사용하여 변경할 수 있습니다.
RC 컨트롤러 스위치는 다음에 대해 정의하는 것이 좋습니다.
- 위치 모드-충돌 방지를 테스트하는 데 사용할 수 있는 안전한 수동 비행 모드입니다.
- 임무 모드 - 임무를 실행하고 장애물 회피를 테스트합니다.
- 귀환 모드 - 기체를 출발 지점으로 안전하게 복귀하여 착륙합니다.
그림과 같이 프로펠러를 부착합니다.

프로펠러 방향(6045 (정상, 시계 반대 방향), 6045 R (반전, 시계 방향)을 레이블에서 확인할 수 있습니다.

제공된 프로펠러 너트를 사용하여 단단히 조입니다.

# 드론 회피 비행
위의 기체 설정이 완료되면 :
기체에 전원 공급 배터리를 연결하십시오.
부팅 순서가 완료되고 회피 시스템이 시작될 때까지 기다리십시오 (부팅중에는 기체는은 무장 명령을 거부합니다).
TIP
부팅/시작 프로세스는 제공된 USB 스틱에서 약 1 분 (또는 내부 메모리에서 30 초) 정도 소요됩니다.
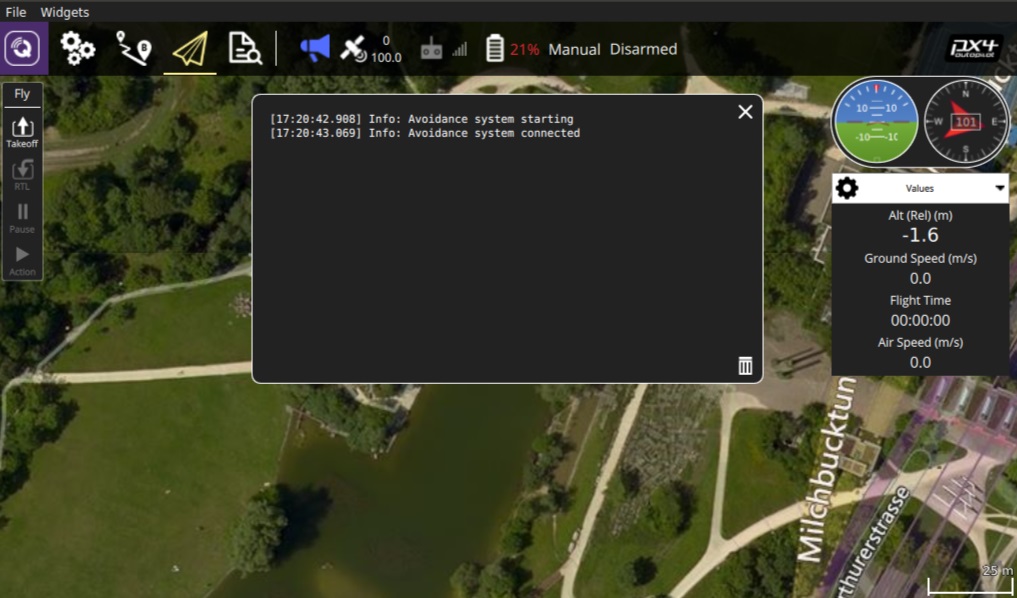
회피 시스템이 제대로 시작되었는 지 확인하십시오.
QGroundControl 알림 로그에 Avoidance system connected 메시지가 표시됩니다.
Structure Core 카메라 전면에 빨간색 레이저가 보입니다.
GPS LED가 녹색으로 바뀔 때까지 기다리십시오. 이것은 기체에 GPS 준비가 완료되어 비행 준비가 완료되었음을 의미합니다!
지상국을 기체 WiFi에 연결합니다.
PX4 비전을 테스트하기 위해 나무나 기타 편리한 장애물이 있는 비행하기에 안전한 실외 위치를 찾으십시오.
충돌 방지를 테스트하려면 위치 모드를 활성화하고 수동으로 장애물을 향해 비행하십시오. 기체의 속도를 줄인 다음 장애물로부터 6m 이내에 정지해야합니다(거리는 CP_DIST 매개 변수를 사용하여 변경 할 수 있음).
장애물 회피를 테스트 하려면 경로에 장애물이 있는 임무를 만드십시오. 그런 다음, 임무 모드로 전환하여 임무를 실행하고 장애물을 돌아다니는 기체를 관찰한 다음 계획된 코스로 돌아갑니다.
# 키트를 사용한 개발
다음 섹션에서는 컴퓨터 비전 소프트웨어를 개발 키트를 사용하는 방법에 대하여 설명합니다.
# PX4 회피 개요
PX4 회피 시스템은 비행 컨트롤러에서 실행되는 PX4 비행 스택에 장애물과 경로 정보를 제공하는 보조 컴퓨터 (연결된 깊이 카메라 포함)에서 실행되는 컴퓨터 비전 소프트웨어로 구성됩니다.
동반 컴퓨터 비전/계획 소프트웨어에 대한 문서는 github에서 찾을 수 있습니다 : PX4/avoidance (opens new window). 이 프로젝트는 다양한 플래너 구현 (ROS 노드로 패키징)을 제공합니다.
- PX4 Vision Kit는 기본적으로 localplanner를 실행하며 이것은 소프트웨어에 권장되는 시작점입니다.
- globalplanner는이 키트로 테스트되지 않았습니다.
- 착륙 플래너에는 아래쪽을 향한 카메라가 필요하며, 먼저 카메라 장착을 수정하지 않고는 사용할 수 없습니다.
PX4와 보조 컴퓨터는 다음 인터페이스를 사용하여 MAVLink (opens new window)를 통하여 데이터를 교환합니다.
- 경로 계획 인터페이스 - 자동 모드에서 회피 기능을 구현 API.
- 충돌 방지 인터페이스 - 장애물 맵을 기반으로하는 수동 위치 모드에서 차량 기반 회피를위한 API (현재 충돌 방지에 사용됨).
# 보조 컴퓨터에 이미지 설치
UP Core에 이미지를 설치하고 내부 메모리(USB 스틱 대신)에서 부팅할 수 있습니다.
내부 메모리 부팅이 훨씬 빠르며 USB 스틱보다 더 많은 메모리를 제공하며 USB 포트를 더 확보할 수 있습니다.
Note
내장 메모리에서 부팅은 약 30 초가 걸리며, 제공된 USB2 스틱으로 부팅은 약 1분 정도 걸립니다(다른 카드는 더 오래 걸릴 수 있음).
USB 이미지를 UP Core로 플래시하려면 :
- 사전 플래시된 USB 드라이브를
USB1이라고 표시된 UP Core 포트에 삽입합니다. - 보조 컴퓨터에 로그인합니다(위 설명 참조).
- 터미널에서 다음 명령어를 실행하여 이미지를 내부 메모리 (eMMC)에 복사합니다. 터미널은 깜박이는 프로세스동안에 여러가지 응답을 요청합니다.
cd ~/catkin_ws/src/px4vision_ros sudo ./flash_emmc.sh
Note
이 스크립트를 실행하면 UP Core에 저장된 모든 정보가 삭제됩니다.
- USB 스틱을 꺼냅니다.
- 기체를 재부팅합니다. 이제 UP Core 컴퓨터가 내부 메모리 (eMMC)에서 부팅됩니다.
# 보조 컴퓨터 부팅
먼저 제공된 USB2.0 스틱을 USB1이라고 표시된 UP Core 포트에 삽입한 다음 4S 배터리를 사용하여 기체에 전원을 공급합니다. 회피 시스템은 약 1 분 이내에 시작되어야 합니다(제공된 USB 스틱에 따라 다름).
TIP
Fly the Drone with avoidance는 회피 시스템이 활성화 여부를 확인하는 방법을 추가로 설명합니다.
이미 보조 컴퓨터에 이미지를 설치 한 경우에는 기체에 전원을 공급하기만하면 됩니다(즉, USB 스틱이 필요하지 않음). 회피 시스템은 약 30 초 이내에 가동 및 실행되어야 합니다.
시작되면 보조 컴퓨터를 비전 개발 환경과 소프트웨어 실행 환경으로 사용할 수 있습니다.
# 보조 컴퓨터 로그인
보조 컴퓨터에 로그인하려면 :
포트
USB2를 통하여 키보드와 마우스를 UP Core에 연결합니다.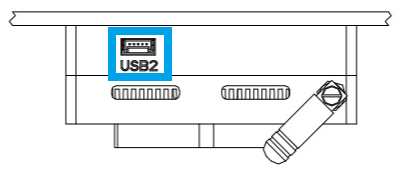
키트의 USB-JST 케이블을 사용하여 USB A 커넥터를 얻습니다.
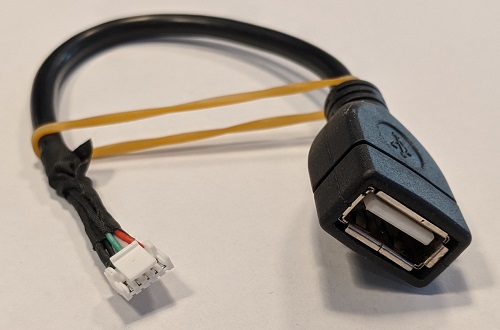
키보드와 마우스에 별도의 커넥터가 있는 경우 USB 허브를 케이블에 연결할 수 있습니다.
모니터를 UP Core HDMI 포트에 연결합니다.
그러면 Ubuntu 로그인 화면이 모니터에 표시됩니다.
아래의 로그인 정보로 UP Core에 로그인합니다.
- 사용자 이름: px4vision
- 비밀번호: px4vision
# PX4 회피 기능 추가 개발
PX4 비전의 UP Core 컴퓨터는 PX4 회피 소프트웨어를 확장을 위한 최적의 개발 환경을 제공합니다 (일반적으로 ROS 2를 사용하여 새로운 컴퓨터 비전 알고리즘을 개발함). 기체에서 소프트웨어를 개발/테스트, 자체 git 저장소에 동기화 및 github PX4/Avoidance (opens new window) 저장소에서 PX4 커뮤니티와 수정 및 개선 사항을 공유할 수 있습니다.
catkin 작업 공간은 ~/catkin_ws에 있으며 PX4 회피 로컬 플래너를 실행하도록 사전에 설정되어 있습니다. 부팅에서 시작 파일(avoidance.launch)은 px4vision_ros 패키지에 있습니다. 실행되는 플래너를 변경하려면 이 파일을 수정하십시오.
회피 패키지는 부팅시 시작됩니다. 다른 플래너를 통합하려면이 기능을 비활성화하여야 합니다.
다음 명령을 사용하여 회피 프로세스를 비활성화 하십시오.
systemctl stop avoidance.service시스템을 재부팅하여 서비스를 다시 시작할 수 있습니다.
기타 유용한 명령은 다음과 같습니다.
# 서비스 재시작
systemctl start avoidance.service
# 서비스 비활성화 (서비스를 중지하고 부팅후 다시 시작하지 않음)
systemctl disable avoidance.service
# 서비스 활성화 (서비스 시작 및 부팅후 재시작 활성화)
systemctl enable avoidance.service
1. 장애물 회피 패키지의 소스 코드는 `~/catkin_ws/src/avoidance`에 있는 https://github.com/PX4/avoidance를 참고하십시오.
1. 코드를 변경하십시오! 최신 회피 코드를 얻으려면 회피 저장소에서 코드를 가져 오십시오.
```sh
git pull origin
git checkout origin/master
- 패키지 빌드
catkin build local_planner
ROS 작업 공간은 ~/catkin_ws에 있습니다. ROS에서 개발하고 catkin 작업 공간을 사용하는 방법에 대한 참조는 ROS catkin 튜토리얼 (opens new window)을 참고하십시오.
# PX4 펌웨어 개발
이 키트는 보조 컴퓨터에서 실행되고 PX4의 유연한 경로 계획 및 충돌 방지 인터페이스와 통합되는 컴퓨터 비전 소프트웨어를 만들기 위하여 설계되었습니다.
PX4 자체를 수정하고 사용자 지정 펌웨어로 설치 할 수도 있습니다.
- 펌웨어를 업데이트하려면 QGroundControl을 USB를 사용하여 키트 Pixhawk 4에 연결하여야 합니다.
- 새 펌웨어를 로드 한 후 PX4 Vision DevKit 기체를 선택합니다.
Note
대부분의 컴퓨터 비전 사용 사례를 충족하기 위해 PX4 코드를 수정할 필요는 *없습니다 *. 인터페이스 또는 다른 기능을 통합하는 방법을 논의하려면 PX4 슬랙 채널 : # computer-vision에 가입하십시오.
# Px4 비전 캐리어 보드 핀아웃
캐리어 보드 핀아웃은 Holybro 웹 사이트 (opens new window)에서 다운로드할 수 있습니다.
# 기타 개발 리소스
- UP Core Wiki (opens new window) - Up Core 보조 컴퓨터 기술 정보
- 후두 개발자 포럼 (opens new window) - 구조 코어 카메라 정보
- Pixhawk 4 개요
- PX4 회피 소프트웨어 / 문서 (opens new window)
- 경로 계획 인터페이스
- Px4 비전 캐리어 보드 핀아웃 (opens new window)
# 기술 지원 방법
하드웨어 문제는 Holybro(productservice@holybro.com)에 문의하십시오.
소프트웨어 문제는 아래의 커뮤니티 지원 채널을 사용하십시오.