# 비행 모드 설정
비행 모드는 임무 또는 기내 (보조 컴퓨터) 제어를 통해 다양한 유형의 자동 조종 장치 지원 비행과 완전 자율 비행을 제공합니다. 다양한 비행 모드를 통해 사용자는 기본 RC 비행 보다 더욱 편리한 플랫폼에서의 비행법을 배울 수 있습니다. 또한, 이륙, 착륙 및 출발지 복귀와 같은 작업을 자동화할 수 있습니다.
PX4를 사용하면 지상국(태블릿 또는 데스크톱) 프로그램이나 무선 조종기에서 비행 모드를 선택할 수 있습니다. 무선 조종기와 태블릿이 모두 연결된 경우 두 시스템 중 하나가 모드를 변경하여 이전 설정을 변경하게 됩니다.
무선 제어 송신기의 스위치에서 비행 모드를 매핑하는 방법을 설명합니다.
TIP
비행 모드를 설정하려면 이전에 무선 조종기 설정을 하여야 합니다.
# 어떤 비행 모드를 설정해야 합니까?
여기에 설명된 비행 모드를 설정하거나 설정하지 않을 수 있습니다.
초보 사용자는 편리한 비행을 위하여 다음 모드 중 하나를 설정하는 것이 좋습니다.
- Stabilized - 뒤집히기 어려운 기체에서 스틱이 풀린 상태에서도 수평을 유지합니다 (그러나 위치를 고정할 수는 없습니다).
- 포지션 - 스틱을 놓으면 기체가 그 위치에서 멈춥니다(그리고 부는 바람에 대한 위치를 유지함).
- 고도 - 상승 및 하강이 최대 속도로 제어됩니다.
스위치를 아래와 같이 일반적으로 매핑합니다.
- 복귀 - 차량을 안전한 높이로 상승한 다음에 이륙 위치로 되돌아갑니다.
- 미션 - 지상관제소에서 보낸 사전 프로그래밍된 미션을 실행합니다.
- 킬 스위치 - 모든 모터 출력을 즉시 중지합니다. 기체가 충돌하는 상황에서는 계속 비행하는 것보다 사고를 방지할 수 있습니다.
# 다중 채널과 단일 채널 모드 선택
PX4 (QGroundControl)은 비행 모드를 송신기 스위치/다이얼에 매핑하는 두 가지 모드를 지원합니다.
- 단일 채널 모드 선택 : 최대 6 개의 비행 모드를 할당하여 단일 채널에 인코딩 된 위치를 전환합니다.
- 다중 채널 모드 선택 : 하나 이상의 채널에서 인코딩된 위치를 전환하는 모드를 할당합니다. 일부 모드는 채널을 공유하도록 하드 코딩되거나 다른 모드 선택에 따라 자동으로 설정됩니다 (다중 채널 모드 선택의 동작이 때때로 혼동 될 수 있음).
TIP
권장되는 접근 방식은 이해와 구성이 쉽기 때문에 단일 채널 모드 선택입니다.
# 단일 채널 비행 모드 선택
단일 채널 선택 모드를 사용하면 "모드"채널을 지정하고 채널의 PWM 값에 따라 활성화되는 최대 6 개의 비행 모드를 선택할 수 있습니다. 킬 스위치 매핑, 시작 모드로 돌아 가기 및 오프 보드 모드를위한 채널을 별도로 지정할 수도 있습니다.
Note
이 접근 방식을 사용하려면 먼저 모드 스위치의 물리적 위치를 단일 채널로 인코딩하도록 송신기를 구성하여야 합니다. 많이 사용하는 Taranis 송신기에 대한 비디오 가이드를 아래에서 제공합니다 (다른 송신기를 사용하는 경우 문서를 확인하십시오).
단일 채널 비행 모드 선택을 구성 방법
QGroundControl을 시작하고 기체를 연결합니다.
RC 송신기를 켭니다.
상단 도구 모음에서 톱니 바퀴 아이콘(기체 설정)을 선택한 다음 가장자리 표시줄에서 비행 모드를 선택하십시오.
TIP
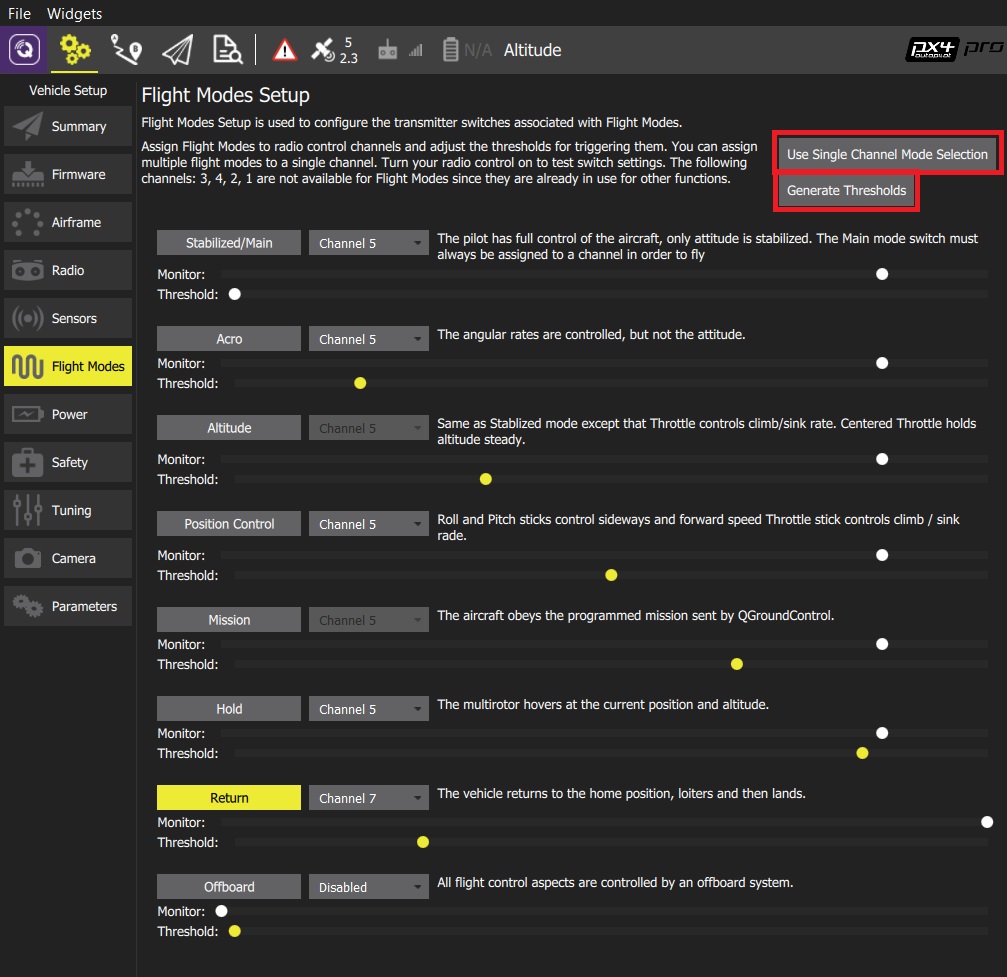
화면이 다중 채널 모드로 열리면 단일 채널 모드 선택 사용 버튼을 클릭하여 화면을 변경합니다.
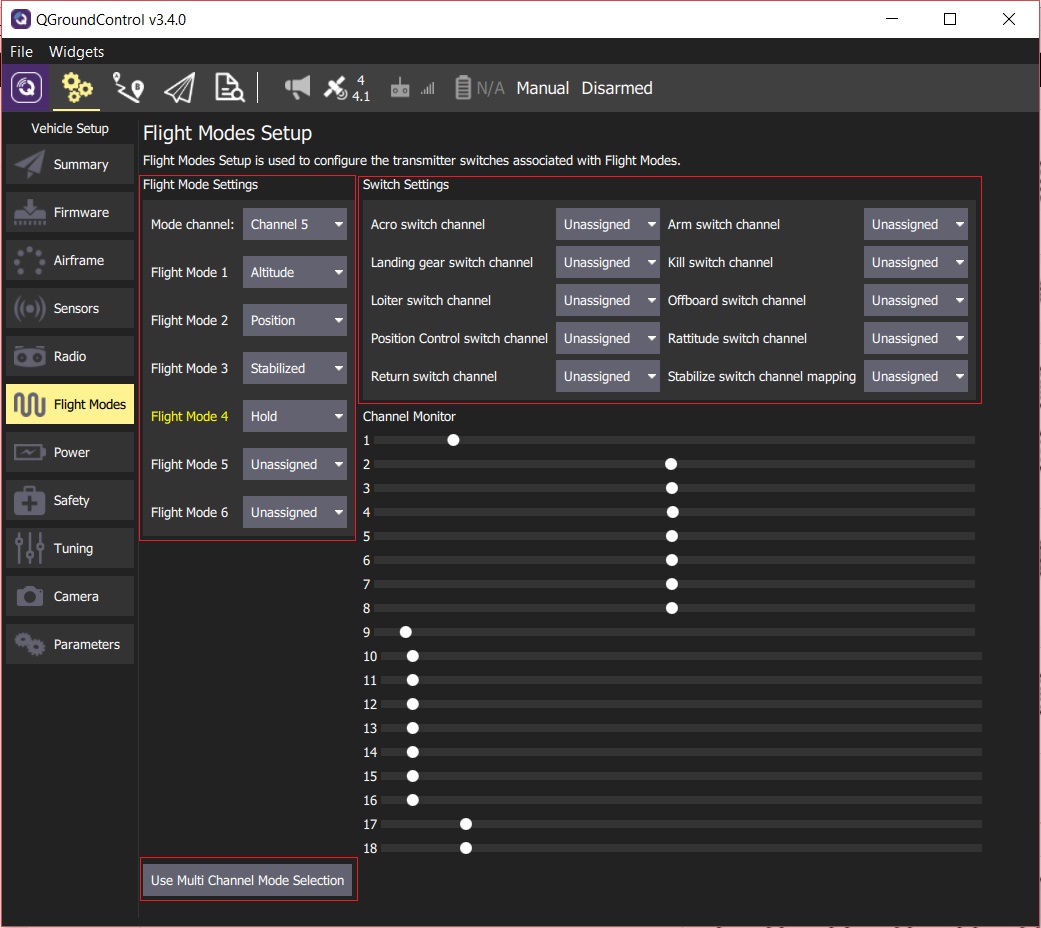
비행 모드 설정 지정
- 모드 채널을 선택합니다 (위에 채널 5로 표시되지만 송신기 구성에 따라 다름).
- 최대 6 개의 비행 모드를 선택합니다.
스위치 설정 지정
- 특정 작업에 매핑 할 채널을 선택합니다 (예 : 복귀(Return) 모드, Kill 스위치, 오프 보드 모드 등). (송신기에 여분의 스위치와 채널이있는 경우).
모드가 올바른 송신기 스위치에 매핑되었는 지 테스트합니다.
- 채널 모니터를 확인하여 예상 채널이 각 스위치에 의해 변경되는 지 확인하십시오.
- 송신기의 각 모드 스위치를 차례로 선택하고 원하는 비행 모드가 활성화되었는 지 확인합니다 (활성 모드의 QGroundControl에서 텍스트가 노란색으로 바뀜).
모든 값은 변경시에 자동으로 저장됩니다.
# 단일 채널 설정 비디오 예 (송신기 설정 포함)
일반적으로 송신기의 2 및 3 위치 스위치 위치를 사용하여 6 개의 비행 모드를 나타내고 각 스위치 조합을 단일 채널에서 전송되는 모드에 대한 특정 PWM 값으로 인코딩합니다.
아래 비디오는 FrSky Taranis 송신기 (매우 인기 있고 강력하게 권장되는 RC 송신기)로 어떻게 수행되는지 보여줍니다. 이 프로세스에는 두 개의 실제 스위치 위치의 각 조합에 "논리적 스위치"를 할당하는 작업이 포함됩니다. 그런 다음 각 논리적 스위치는 동일한 채널에서 다른 PWM 값에 할당됩니다.
그런 다음 비디오는 <0 QGroundControl을 사용하여 모드 채널을 지정하고 모드를 6 개의 "슬롯"에 각각 매핑하는 방법을 보여줍니다.
# 단일 채널 설정 지침 예
이 예는 무선 송신기와 PX4를 설정법을 보여줍니다.
- 단일 채널 모드 설정 방식 (수동, 고도, 아크로)을 사용하여 비행 모드를 선택할 수있는 3 방향 스위치.
- 일부 기능 (시동/시동 해제)을 호출하는 양방향 스위치 (무선조종기 스위치 매개 변수를 통해).
Note
이 예는 인기있는 FrSky Taranis 송신기 설정법을 보여줍니다. 다른 송신기의 구성은 약간씩 다를 수 있습니다.
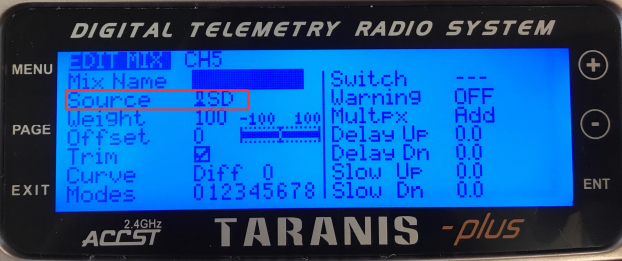
먼저 송신기를 설정하십시오. 아래에서는 Taranis "SD"스위치를 채널 5에 매핑하는 방법을 보여줍니다. 아래와 같이 Taranis UI '믹서' 페이지에서 수행됩니다.
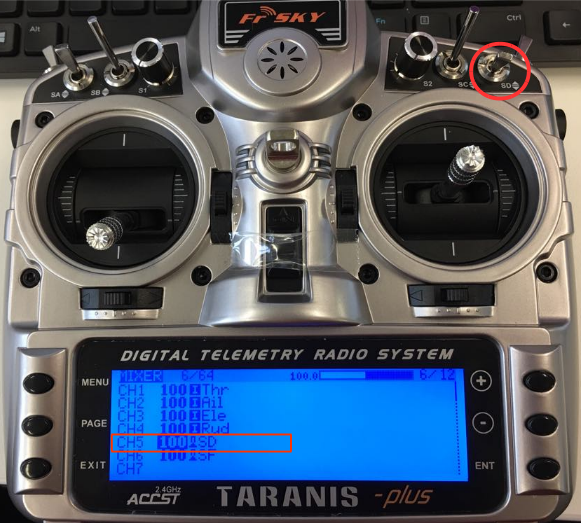
그런 다음 QGroundControl의 단일 채널 모드 선택 옵션에서 채널과 비행 모드를 선택할 수 있습니다.
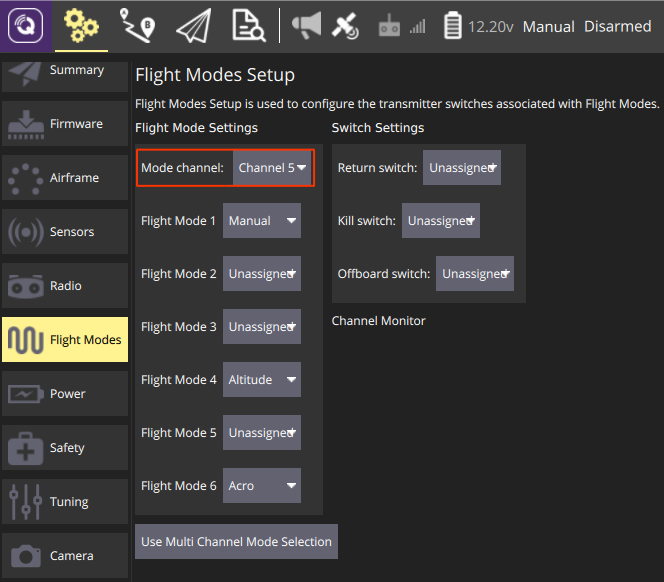
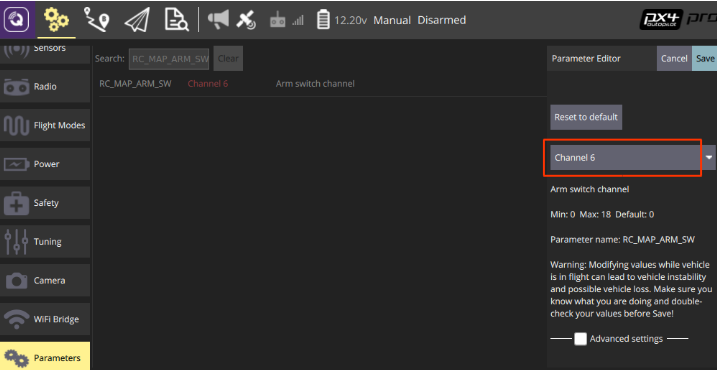
라디오 스위치 매개 변수는 특정 기능을 채널에 매핑합니다. 송신기에서 이미 채널을 매핑하였으면, 파라미터를 설정하여 채널을 할당 할 수 있습니다.
예를 들어 아래에서 채널 6을 QGroundControl의 RC_MAP_ARM_SW 매개 변수에 매핑합니다.
# 다중 채널 비행 모드 선택
TIP
다중 채널 선택 사용자 인터페이스가 어렵기 때문에, 단일 채널 비행 모드 선택을 사용하는 것이 좋습니다. 이 방법을 선택한 경우 가장 좋은 방법은 채널 할당한 다음에 QGroundControl에서 표시하는 정보를 기록하는 것입니다.
다중 채널 선택 사용자 인터페이스를 사용하면 하나 이상의 모드를 하나 이상의 채널에 매핑할 수 있습니다. 항상 정의해야하는 일부 모드 (따라서 스위치)와 이를 할당해야하는 채널이 있습니다.
다중 채널 UI를 사용하여 비행 모드 설정 방법
RC 송신기를 켭니다.
QGroundControl을 시작하고 기체를 연결합니다.
상단 도구 모음에서 톱니 바퀴 아이콘(기체 설정)을 선택한 다음 가장자리 표시줄에서 비행 모드를 선택하십시오.
TIP
화면이 단일 채널 모드로 열리면 다중 채널 모드 선택 버튼을 클릭하여 화면을 변경합니다.
스위치에 할당할 모드를 선택하고 관련 채널을 선택합니다 (선택된 모드는 사용자 인터페이스에서 이동되어 채널별로 그룹화됩니다). 채널 할당 모드에는 여러 가지 복잡한 문제가 있습니다.
- 일부 모드는 다른 모드 설정 값에 따라 채널 및 임계 값 레벨이 자동으로 정의되기 때문에 수동으로 편집할 수 없습니다 (회색으로 표시됨). 예:
- 미션 모드 - 보류와 동일한 채널 번호가 자동으로 할당됩니다 (보류에 대한 채널이 사용자에 의해 정의 된 경우). Hold에 대한 채널이 정의되어 있지 않으면, Mission 모드는 Stabilized/Main 모드와 동일한 채널이 자동으로 할당됩니다. 예를 들어 사용자가 다른 채널에서 Stabilized/Main 및 Mission 모드를 정의하지 못하도록하여 사용자가 동시에 두 모드를 모두 켤 수 없도록합니다.
- 고도 모드 - 위치 제어 (정의 된 경우)와 동일한 채널 번호가 자동으로 할당되거나 그렇지 않으면, 안정화/메인과 동일한 채널이 자동으로 할당됩니다.
- Assist 모드 - 이 모드는 위치 제어가 활성화되고 정의 된 경우 안정화/메인 모드와 동일한 채널에 추가됩니다. 안정화/기본과 다른 채널입니다.
- 일부 모드는 다른 모드 설정 값에 따라 채널 및 임계 값 레벨이 자동으로 정의되기 때문에 수동으로 편집할 수 없습니다 (회색으로 표시됨). 예:
임계치 생성 버튼을 클릭합니다.
- 모든 모드에 대한 임계 값이 자동으로 생성되고 할당 모드에 대해 각 채널에 균등하게 분배됩니다. 예를 들어, 위에 표시된 모드 할당에서 대부분의 모드는 모드 5에 할당되며 각 모드의 채널 임계 값이 채널 전체에 고르게 분포되어 있음을 알 수 있습니다.
이 모드에 대한 시연은 자동 조종 장치 설정 동영상 (opens new window) (유투브)에서 볼 수 있습니다.
Note
이 비행 모드 선택 메커니즘은 PX4가 어떤 모드를 선택해야하는지 결정하는 방식으로 인해 비교적 복잡합니다. 이 순서도를 참고하십시오.
# 추가 정보
← 조이스틱 설정 배터리 파워 모듈 설정 →