DroPix Flight Controller
The Drotek® DroPix autopilot is based on the Pixhawk®-project FMUv2 open hardware design. It runs the PX4 Flight Stack on the NuttX OS.
The DroPix system includes integrated multithreading, a Unix/Linux-like programming environment, completely new autopilot functions such as Lua scripting of missions and flight behavior, and a custom PX4 driver layer ensuring tight timing across all processes.
This flight controller is manufacturer supported.
主要特性
- Advanced 32 bit ARM Cortex® M4 Processor running NuttX RTOS
- 14 PWM/servo outputs (8 with failsafe and manual override, 5 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes
- Redundant power supply inputs and automatic failover
- External safety button for easy motor activation
- Multicolor LED indicator
- High-power, multi-tone piezo audio indicator
- microSD card for long-time high-rate logging
- Sensors
- ST Micro L3GD20 3-axis 16-bit gyroscope
- ST Micro LSM303D 3-axis 14-bit accelerometer / magnetometer
- Invensense® MPU 6000 3-axis accelerometer/gyroscope
- MEAS MS5611 barometer
- Standard MK style mounting holes 45 mm x 45 mm (M3 holes)
- 尺寸
- Size: 67506 mm
- Weight: 15g (without connectors)
Where to buy
DroPix Autopilots & Accessories
Documentation
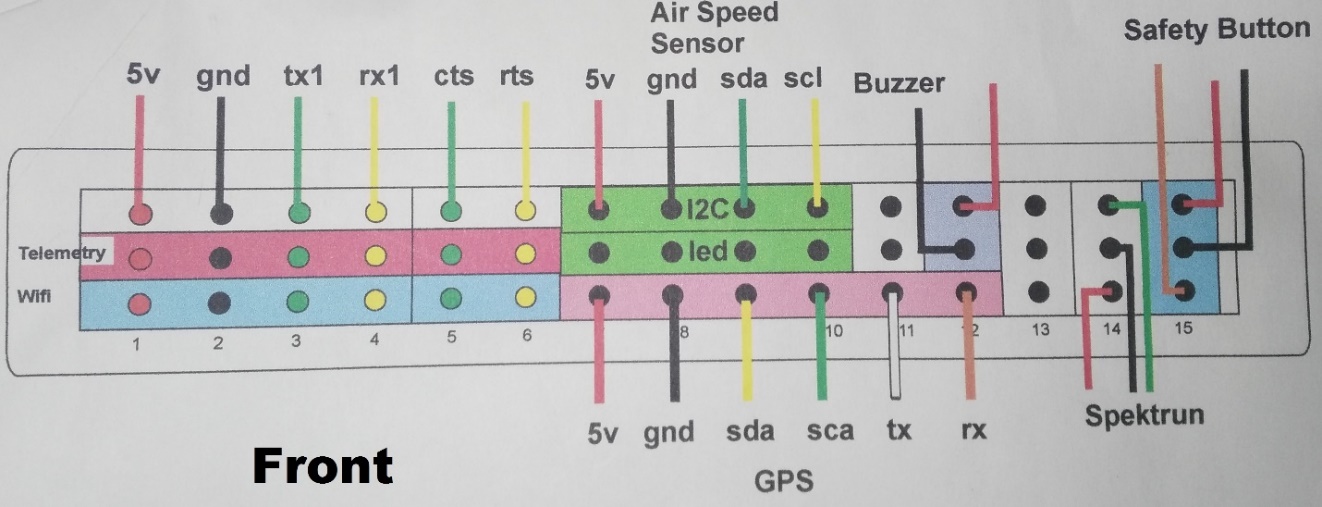
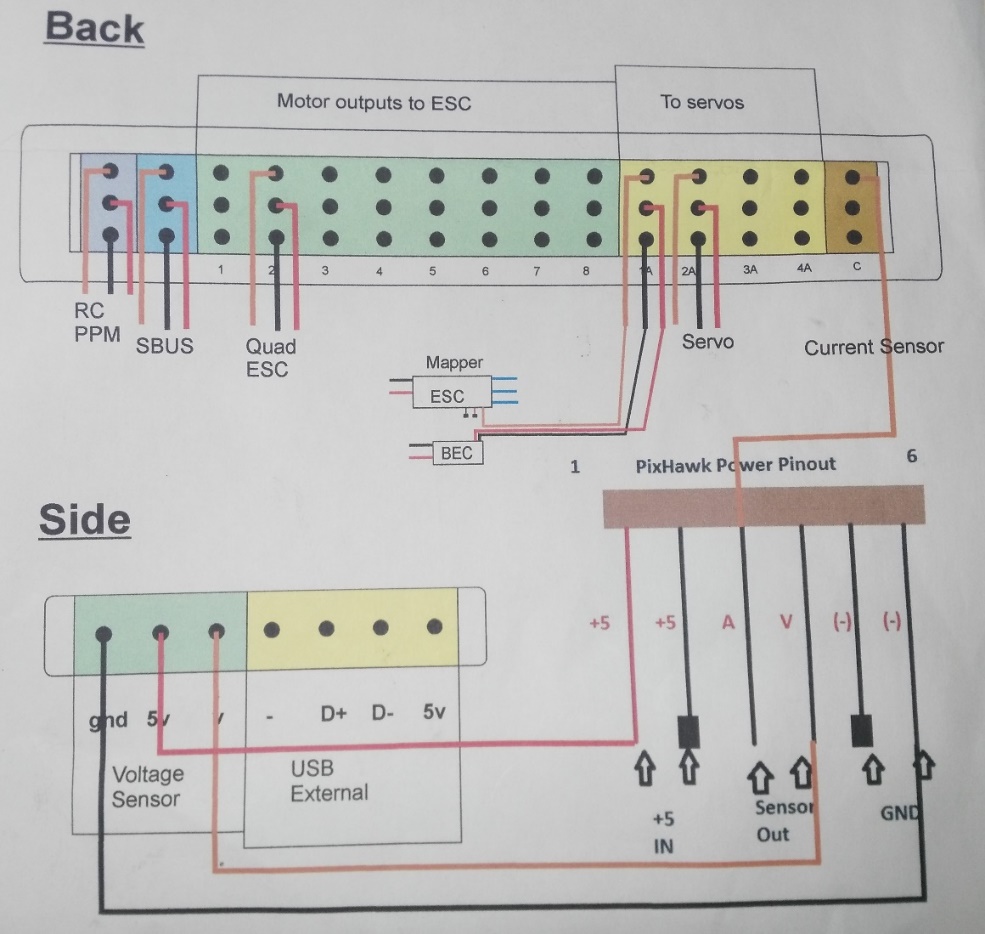
Wiring Guides
The following diagrams show the Dropix connector information (for more information see the drotek documentation).
编译固件
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v2_default
Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |