ModalAI Flight Core v1
The ModalAI Flight Core v1 is a flight controller for PX4, made in the USA. The Flight Core can be paired with ModalAI VOXL for obstacle avoidance and GPS-denied navigation, or used independently as a standalone flight controller.
This flight controller is manufacturer supported.
Specification
| Feature | Details |
|---|---|
| Weight | 6 g |
| MCU | 216MHz, 32-bit ARM M7 STM32F765II |
| Memory | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| Firmware | PX4 |
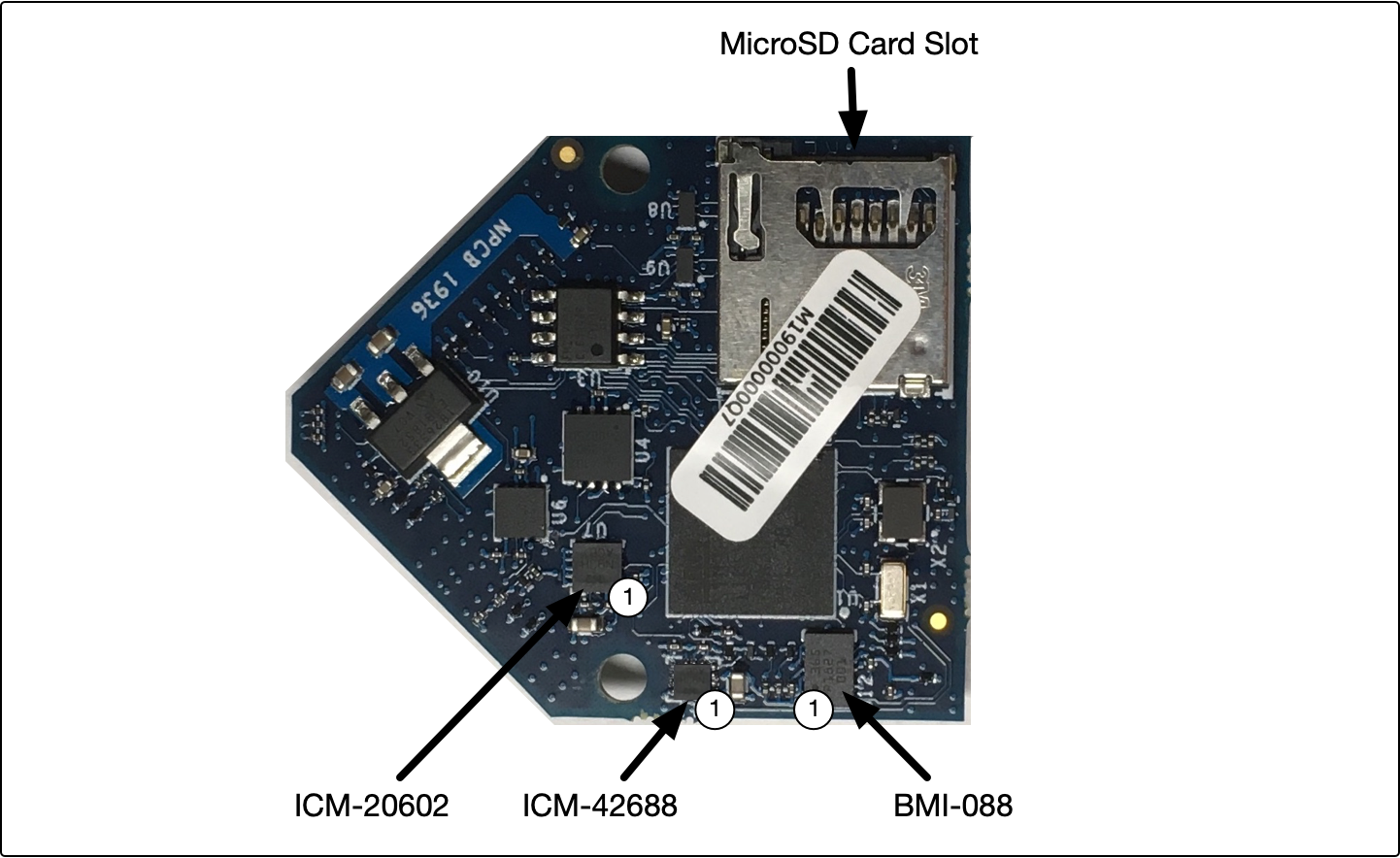
| IMUs | ICM-20602 (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (SPI6) | |
| Barometer | BMP388 (I2C4) |
| Secure Element | A71CH (I2C4) |
| microSD Card | Information on supported cards |
| Inputs | GPS/Mag |
| Spektrum | |
| Telemetry | |
| CAN bus | |
| PPM | |
| Outputs | 6 LEDs (2xRGB) |
| 8 PWM Channels | |
| Extra Interfaces | 3 serial ports |
| I2C | |
| GPIO |
More detailed hardware documentation can be found here.
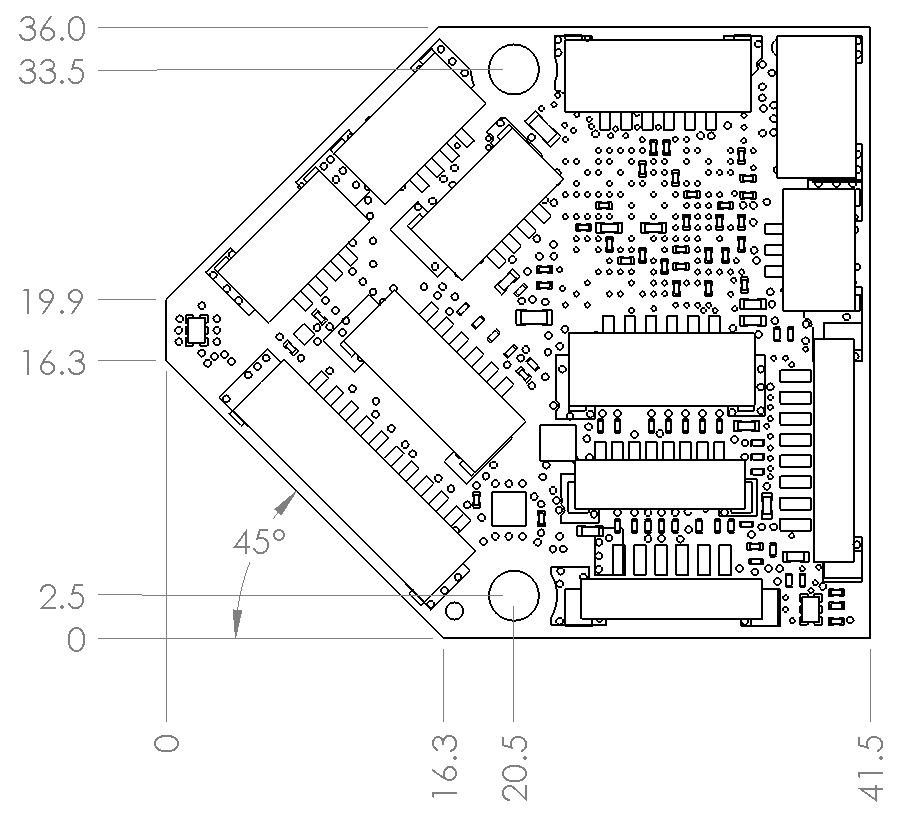
Dimensions
PX4 Firwmare Compatibility
Flight Core v1 is fully compatible with the official PX4 Firmware from PX4 v1.11.
ModalAI maintains a branched PX4 version for PX4 v1.10. This includes improvements in VIO and VOA that are planned to be upstreamed.
More information about the firmware can be found here.
QGroundControl Support
This board supported in QGroundControl 4.0 and later.
Availability
- Flight Core Complete Kit is available here
- Flight Core Board Only is available here
- Flight Core assembled with VOXL and cameras is available at here
Quick Start
Orientation
The diagram below shows the recommended orientation, which corresponds to ROTATION_NONE starting with PX4 v1.11 (and on the ModalAI-maintained PX4 v1.10 branch)
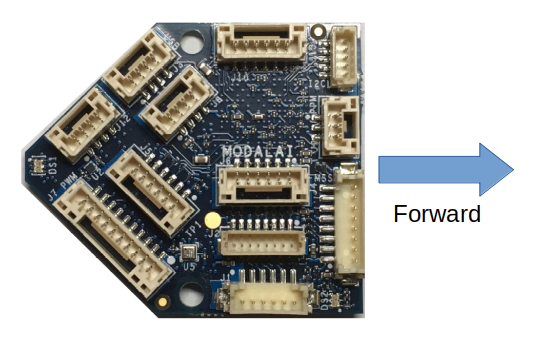
For PX4 v1.10 stable releases from QGroundControl use
ROTATION_YAW_180for the above orientation.
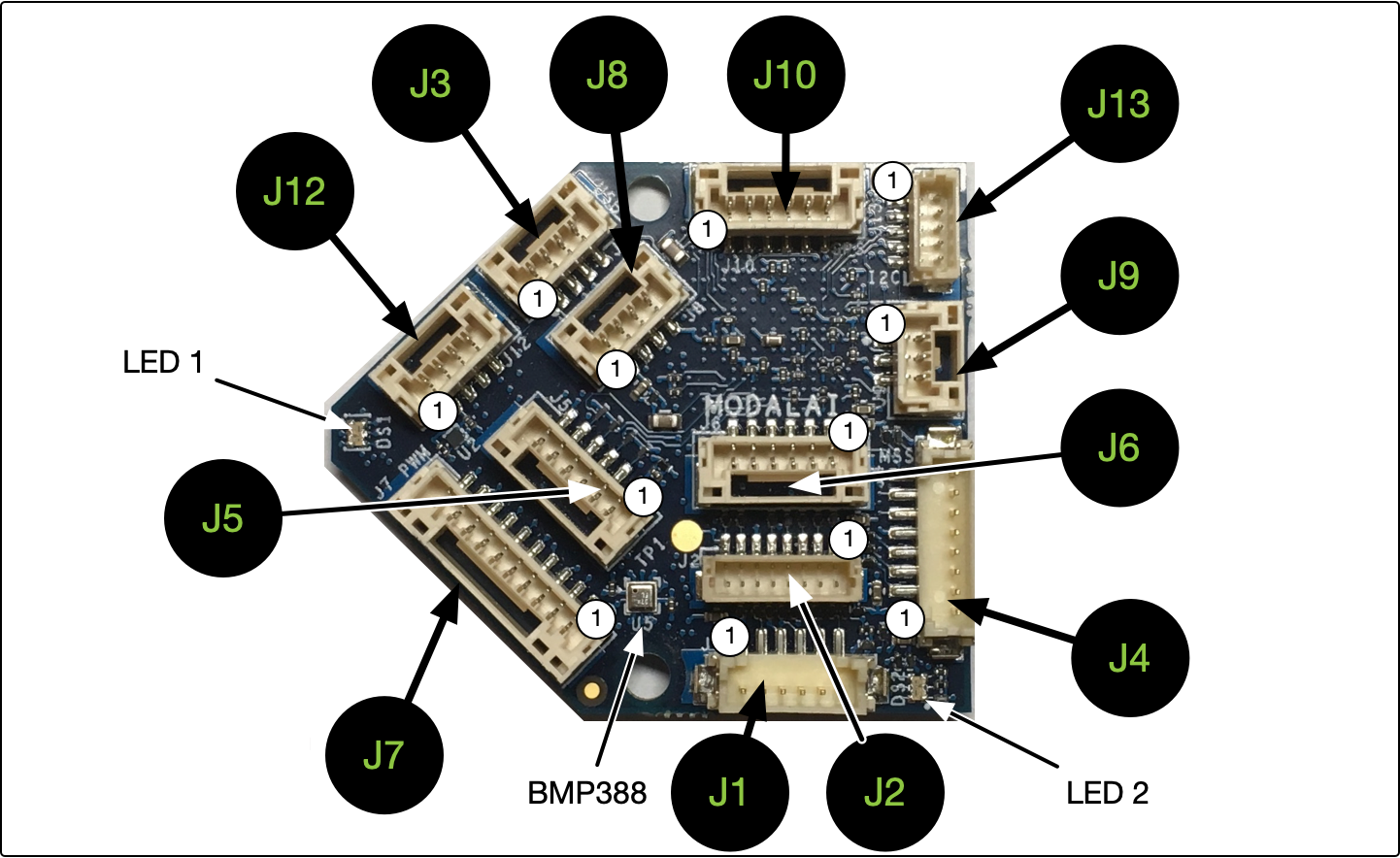
Connectors
Detailed information about the pinouts can be found here.
| Connector | Summary |
|---|---|
| J1 | VOXL Communications Interface Connector (TELEM2) |
| J2 | Programming and Debug Connector |
| J3 | USB Connector |
| J4 | VOXL Spare Communications Interface Connector (TELEM3) |
| J5 | Telemetry Connector (TELEM1) |
| J6 | VOXL-Power Management Input / Expansion |
| J7 | 8-Channel PWM Output Connector |
| J8 | CAN Bus Connector |
| J9 | PPM RC In |
| J10 | External GPS & Magnetometer Connector |
| J12 | RC input |
| J13 | I2C Display (Spare Sensor Connector) / Safety Button Input |
User Guide
The full user guide is available here.
How to Build
To build PX4 for this target:
make modalai_fc-v1
Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | Debug Console (J2) |
| UART4 | /dev/ttyS3 | Expansion UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2, Primary VOXL Communications (J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | N/A |
Support
Please visit http://support.modalai.com/ for more information.