E-Flite Convergence 倾转旋翼 (Pixfalcon)
E-Flite Convergence 这种机架可以通过PX4轻松变成具有完全自主飞行能力的垂直起降固定翼机型, 虽然空间受限,但是留给 Pixfalcon、GPS、接收机的空间也足够了
硬件连接
Convergence 机架需要按照以下方式,与飞控 Pixfalcon 之间连接7路 PWM 信号(与 PX4 中的机身布局相匹配,左右方向是从飞机尾部向机头方向观察来确定的)
| Port | 接口定义 |
|---|---|
| MAIN 1 | 右电机 |
| MAIN 2 | 左电机 |
| MAIN 3 | 尾电机 |
| MAIN 4 | 空 |
| MAIN 5 | 右倾转舵机 |
| MAIN 6 | 左倾转舵机 |
| MAIN 7 | 右翼升降舵 |
| MAIN 8 | 左翼升降舵 |
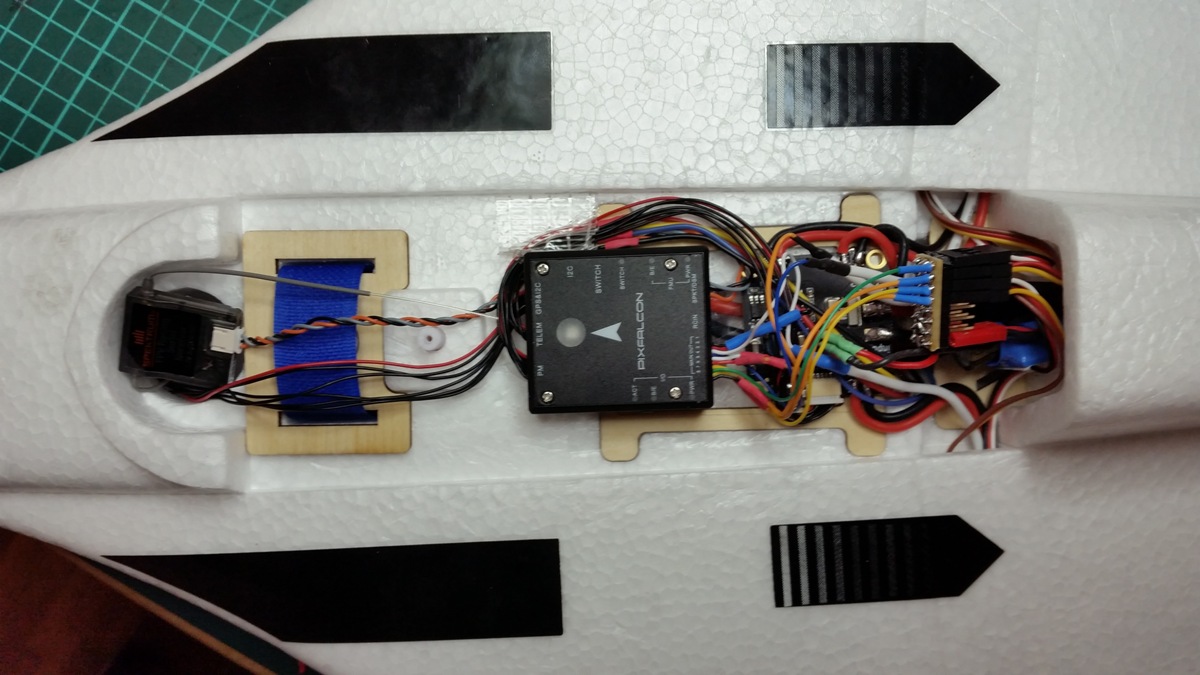
Pixfalcon 硬件可以安装在飞机原始的飞控安装位置
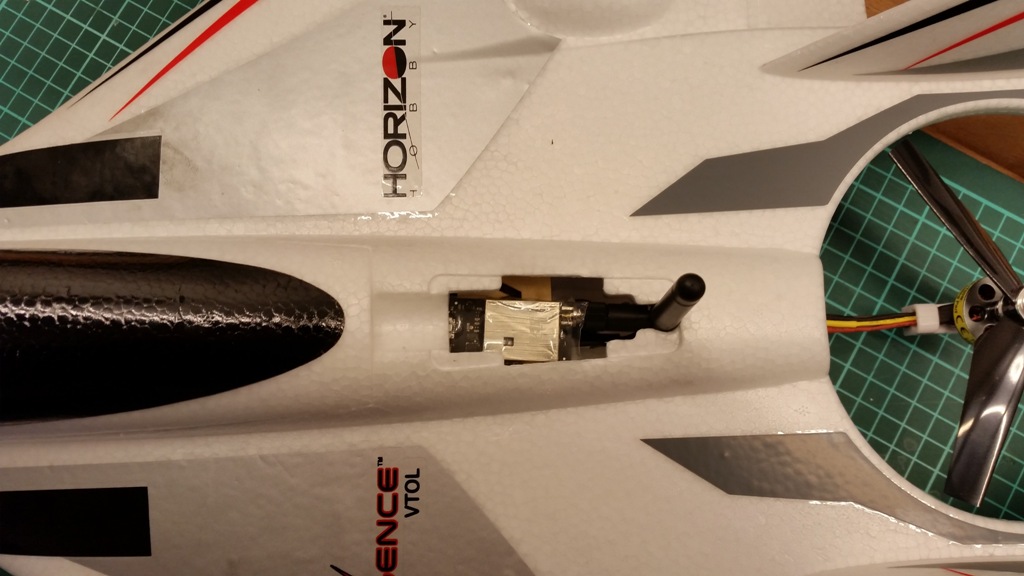
接收机模块安装在飞机原本需要安装 FPV 图传的空间内
对于GPS,我们在驾驶舱内泡沫上切出一块空间, 这样GPS可以放在机身内,良好内置不影响外观

配置
在飞控校准之前(遥控、传感器、飞行模式),在 QGC 中的机架部分,选择 VTOL Tiltrotor 菜单栏下的 E-Flite Convergence 选项,并在之后重启
如果机架在 QGC 中无法显示,重新设置以下参数并重启
SYS_AUTOSTART: 13012SYS_AUTOCONFIG: 1
备注:
- 记得为转换到固定翼模式分配一个转换开关
- 默认启用永久稳定, 如果想在手动模式下控制固定翼模式飞行,把 VT_FW_PERM_STAB 设置为 0