Acro Mode (Multicopter)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
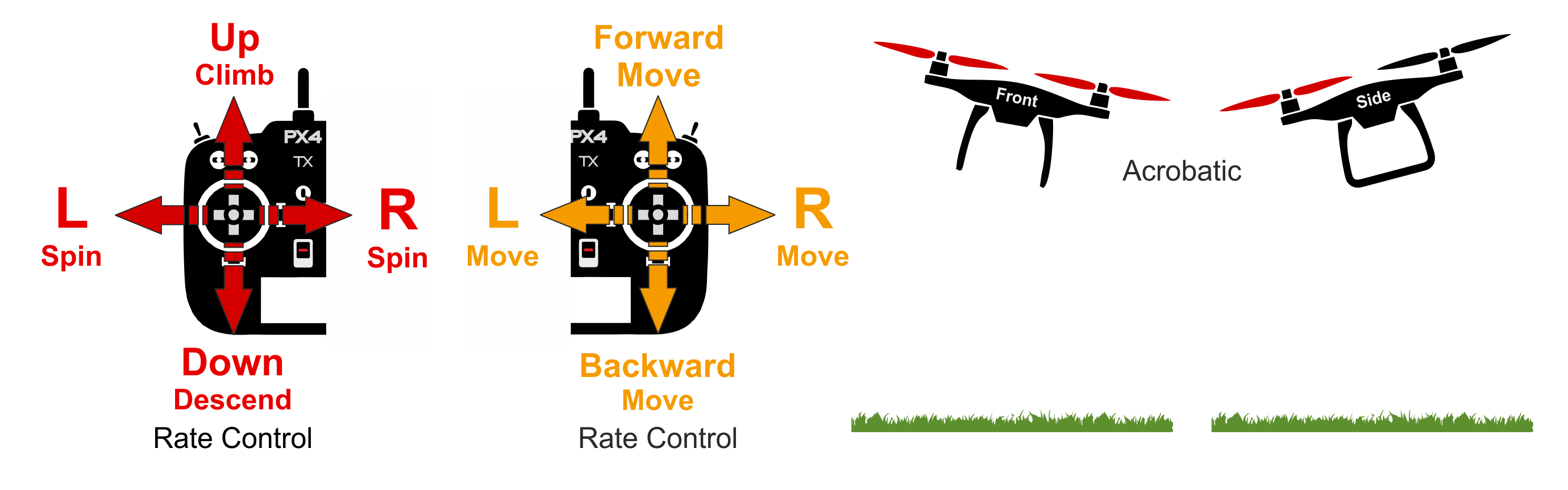
Acro mode is the RC mode for performing acrobatic maneuvers e.g. flips, rolls and loops.
The roll, pitch and yaw sticks control the rate of angular rotation around the respective axes and throttle is passed directly to control allocation. When sticks are centered the vehicle will stop rotating, but remain in its current orientation (on its side, inverted, or whatever) and moving according to its current momentum.
Technical Description
Manual mode for performing acrobatic maneuvers e.g. flips, rolls and loops.
RC Roll/Pitch/Yaw (RPY) stick inputs control the rate of angular rotation around the respective axes. Throttle is passed directly to control allocation. When sticks are centered the vehicle will stop rotating, but remain in its current orientation (not necessarily level) and moving according to its current momentum.
Manual control input is required (such as RC control, joystick):
- Roll, Pitch, Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
- Throttle: Manual control via RC sticks. RC input is sent directly to control allocation.
Stick Input Mapping
The default values for expo and rate parameters are beginner friendly, reducing the chance that users will flip the vehicle when first trying this mode, or when using Acro mode for manual rate tuning.
Unfortunately they are poor for Acro flying though! The following values are more reasonable for experienced users:
- MC_ACRO_R_MAX:
720(2 turns per second) - MC_ACRO_P_MAX:
720(2 turns per second) - MC_ACRO_Y_MAX:
540(2 turns per second) - MC_ACRO_EXPO:
0.69 - MC_ACRO_EXPO_Y:
0.69 - MC_ACRO_SUPEXPO:
0.69 - MC_ACRO_SUPEXPOY:
0.7
The roll, pitch, and yaw input stick mapping for Acro mode using the values above are shown below. The curve enables a high turn rate at maximum stick input for performing acrobatic maneuvers, and a zone of lower sensitivity close to the stick center for small corrections.
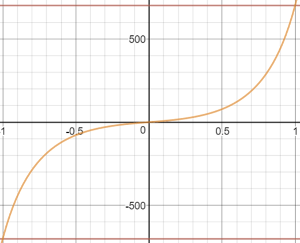
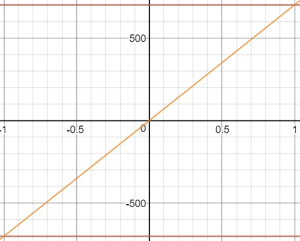
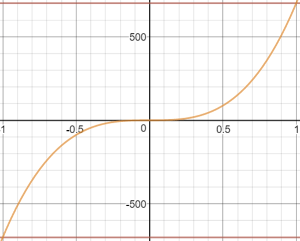
This roll and pitch input stick response can be tuned using the MC_ACRO_EXPO and MC_ACRO_SUPEXPO "exponential" parameters, while the yaw stick input response is tuned using MC_ACRO_EXPO_Y and MC_ACRO_SUPEXPOY. MC_ACRO_EXPO and MC_ACRO_EXPO_Y tune the curve(s) between a linear and cubic curve as shown below. MC_ACRO_SUPEXPO and MC_ACRO_SUPEXPOY allow the shape to be further tuned, modifying the width of the area of reduced sensitivity.
INFO
The mathematical relationship is:
Where f = MC_ACRO_EXPO or MC_ACRO_EXPO_Y, g = MC_ACRO_SUPEXPO or MC_ACRO_SUPEXPOY, and r is the maximum rate.
You can experiment with the relationships graphically using the PX4 SuperExpo calculator.
Parameters
| Parameter | Description |
|---|---|
| MC_ACRO_EXPO | Acro mode "exponential" factor for tuning the stick input curve shape for roll and pitch. Values: 0 Purely linear input curve, 1 Purely cubic input curve. Default: 0. |
| MC_ACRO_EXPO_Y | Acro mode "exponential" factor for tuning the stick input curve shape for yaw. Values: 0 Purely linear input curve, 1 Purely cubic input curve. Default: 0.69. |
| MC_ACRO_SUPEXPO | Acro mode "SuperExpo" factor for refining stick input curve shape for the roll and pitch axes (tuned using MC_ACRO_EXPO). Values: 0 Pure Expo function, 0.7 reasonable shape enhancement for intuitive stick feel, 0.95 very strong bent input curve only near maxima have effect. Default: 0. |
| MC_ACRO_SUPEXPOY | Acro mode "SuperExpo" factor for refining stick input curve shape for the yaw axis (tuned using MC_ACRO_EXPO_Y). Values: 0 Pure Expo function, 0.7 reasonable shape enhancement for intuitive stick feel, 0.95 very strong bent input curve only near maxima have effect. Default: 0. |
| MC_ACRO_P_MAX | Max acro pitch rate. Default: 100.0 deg/s. |
| MC_ACRO_R_MAX | Max acro roll rate. Default: 100 deg/s. |
| MC_ACRO_Y_MAX | Max acro yaw rate. Default: 100 deg/s. |