ModalAI VOXL Flight
PX4 v1.11WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
The ModalAI VOXL Flight (Datasheet) is one of the first computing platforms to combine the power and sophistication of Snapdragon with the flexibility and ease of use of PX4 on an STM32F7. Made in the USA, VOXL Flight supports obstacle avoidance and GPS-denied (indoor) navigation fused with a PX4 flight controller on a single PCB.
INFO
This flight controller is manufacturer supported.
Specifications
System
| Feature | Details |
|---|---|
| Weight | 26 g |
Companion Computer
| Feature | Details |
|---|---|
| Base Operation System | Linux Yocto Jethro with 3.18 kernel. Additional Linux Operating Systems can be used by running Docker on VOXL, details here |
| Compute | Qualcomm Snapdragon 821 w/ 4GB LPDDR4 1866MHz, Snapdragon 821 Datasheet, Docs |
| CPU | Quad-core CPU up to 2.15GHz |
| GPU | Adreno 530 GPU at 624MHz |
| Compute DSP | Hexagon compute DSP (cDSP) 825MHz |
| Sensor DSP | Hexagon sensor DSP (sDSP) 700MHz |
| Video | 4k30 Video Capture h.264/5 w/ 720p FPV |
| Camera Interfaces | Support for MIPI-CSI2, USB UVC, HDMI |
| Wi-Fi | Pre-certified Wi-Fi module QCNFA324 FCC ID:PPD-QCNFA324, QCA6174A modem, 802.11ac 2x2 Dual-band, Bluetooth 4.2 (dual-mode) |
| 4G LTE | Optional add-on module |
| Microhard pDDL | Optional add-on module |
| GNSS | WGR7640 10Hz |
| I/O | 1x USB3.0 OTG (ADB port), 1x USB2.0 (expansion port), 2x UART, 3x I2C, additional GPIO and SPI can be configured |
| Storage | 32GB (UFS 2.0), Micro SD Card |
| Software | Docker, OpenCV 2.4.11, 3.4.6, 4.2, ROS Indigo, Qualcomm Machine Vision SDK, see GitLab for lots of open source examples! |
| IMUs | ICM-42688 (SPI10), ICM-20948 (SPI1) |
| Barometer | BMP280 |
Flight Controller
| Feature | Details |
|---|---|
| MCU | 216MHz, 32-bit ARM M7 STM32F765II |
| Memory | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| Firmware | PX4 |
| IMUs | ICM-20602 (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (SPI6) | |
| Barometer | BMP388 (I2C4) |
| Secure Element | A71CH (I2C4) |
| microSD Card | Information on supported cards |
| Inputs | GPS/Mag |
| Spektrum | |
| Telemetry | |
| CAN bus | |
| PPM | |
| Outputs | 6 LEDs (2xRGB) |
| 8 PWM Channels | |
| Extra Interfaces | 3 serial ports |
| I2C | |
| GPIO |
INFO
More detailed hardware documentation can be found here.
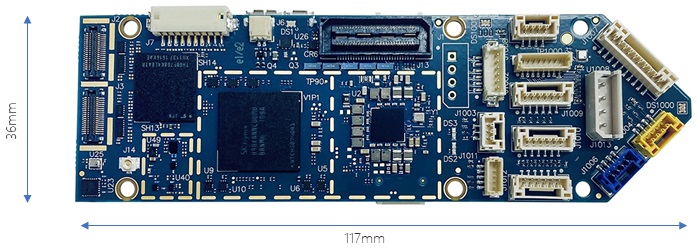
Dimensions
PX4 Firmware Compatibility
VOXL Flight is fully compatible with the official PX4 Firmware from PX4 v1.11.
ModalAI maintains a branched PX4 version for PX4 v1.11. This includes UART ESC support and improvements in VIO and VOA that are planned to be upstreamed.
More information about the firmware can be found here.
QGroundControl Support
This board supported in QGroundControl 4.0 and later.
Availability
- VOXL Flight Complete Kit
- VOXL Flight Board (only)
- VOXL Flight integrated with Obstacle Avoidance Cameras (VOXL Flight Deck) (Datasheet)
- VOXL Flight in a ready to fly VOXL m500 Development Drone (Datasheet)
Quick Start
A quickstart from the vendor is located here.
voxl-vision-px4
The VOXL Flight runs voxl-vision-px4 on the companion computer portion of the hardware serving as a sort of MAVLink proxy. For details, the source code is available here
Connectors
Detailed information about the pinouts can be found here.
Top
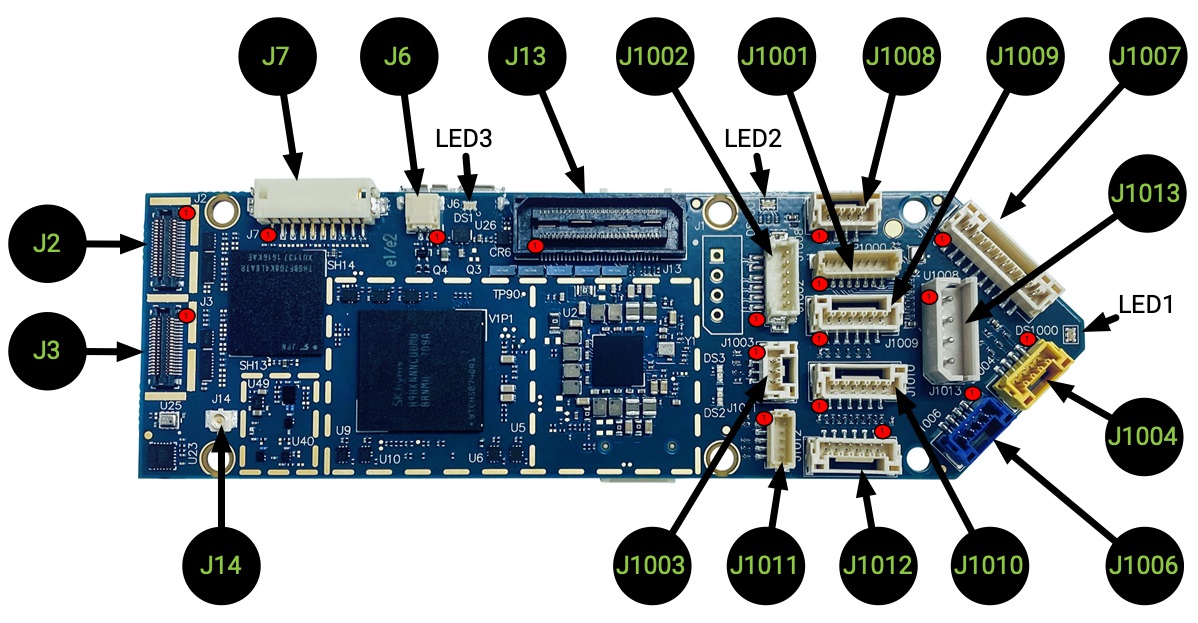
Note: 1000 Series connectors accessible from the STM32/PX4
| Connector | Summary | Used By |
|---|---|---|
| J2 | Hires 4k Image Sensor (CSI0) | Snapdragon - Linux |
| J3 | Stereo Image Sensor (CSI1) | Snapdragon - Linux |
| J6 | Cooling Fan Connector | Snapdragon - Linux |
| J7 | BLSP6 (GPIO) and BLSP9 (UART) | Snapdragon - Linux |
| J13 | Expansion B2B | Snapdragon - Linux |
| J14 | Integrated GNSS Antenna Connection | Snapdragon - Linux |
| J1001 | Programming and Debug/UART3 | STM32 - PX4 |
| J1002 | UART ESC, UART2/TELEM3 | STM32 - PX4 |
| J1003 | PPM RC In | STM32 - PX4 |
| J1004 | RC Input, Spektrum/SBus/UART6 | STM32 - PX4 |
| J1006 | USB 2.0 Connector (PX4/QGroundControl) | STM32 - PX4 |
| J1007 | 8-Channel PWM/DShot Output | STM32 - PX4 |
| J1008 | CAN Bus | STM32 - PX4 |
| J1009 | I2C3, UART4 | STM32 - PX4 |
| J1010 | Telemetry (TELEM1) | STM32 - PX4 |
| J1011 | I2C2, Safety Button Input | STM32 - PX4 |
| J1012 | External GPS & Mag, UART1, I2C1 | STM32 - PX4 |
| J1013 | Power Input, I2C3 | STM32 - PX4 (powers whole system) |
Bottom
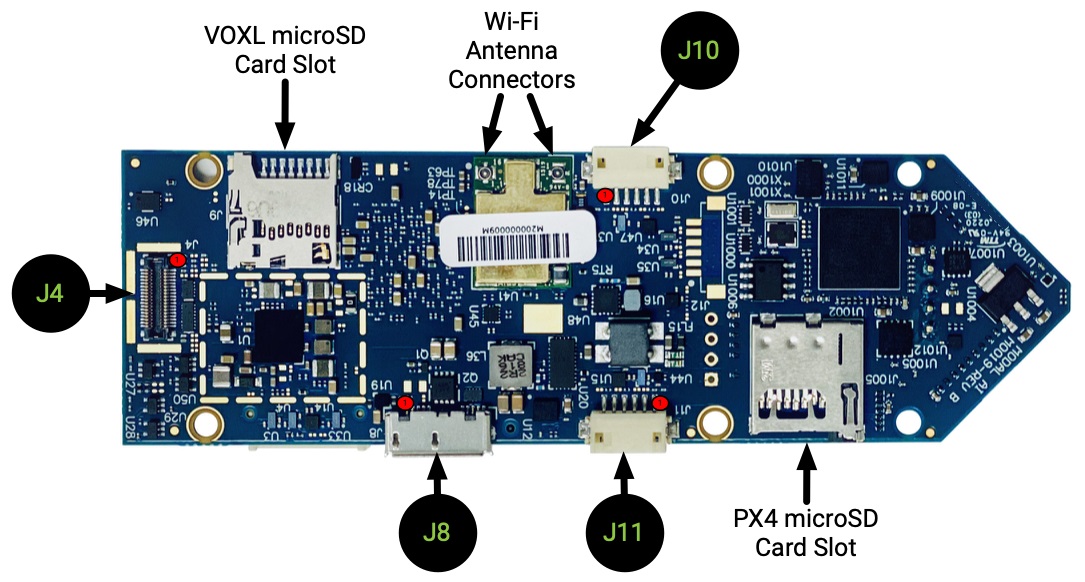
Note: 1000 Series connectors accessible from the STM32/PX4
| Connector | Summary | Used By |
|---|---|---|
| J4 | Tracking/Optic Flow Image Sensor (CSI2) | Snapdragon - Linux |
| J8 | USB 3.0 OTG | Snapdragon - Linux, adb |
| J10 | BLSP7 UART and I2C off-board | Snapdragon - Linux |
| J11 | BLSP12 UART and I2C off-board | Snapdragon - Linux |
| VOXL microSD | Snapdragon - Linux | |
| PX4 microSD | 32Gb Max | STM32 - PX4 |
| Wi-Fi Antennas | Included | Snapdragon - Linux |
User Guide
The full user guide is available here.
How to Build
To build PX4 for this target:
make modalai_fc-v1Serial Port Mapping
Note: mappings shown are for the PX4 controlled interfaces only
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J1012) |
| USART2 | /dev/ttyS1 | TELEM3 (J1002) |
| USART3 | /dev/ttyS2 | Debug Console (J1001) |
| UART4 | /dev/ttyS3 | Expansion UART (J6) |
| UART5 | /dev/ttyS4 | UART between PX4 and Companion Computer |
| USART6 | /dev/ttyS5 | RC (J1004) |
| UART7 | /dev/ttyS6 | TELEM1 (J1010) |
| UART8 | /dev/ttyS7 | N/A |
Support
Please visit the ModalAI Forum for more information.