PX4 Board Configuration (Kconfig)
The PX4 Autopilot firmware can be configured at build time to adapt it for specialized applications (fixed-wing, multicopter, rover or more), to enable new and experimental features (such as Cyphal) or to save flash & RAM usage by disabling some drivers and subsystems. This configuration is handled through Kconfig, which is the same configuration system used by NuttX.
The configuration options (often referred as "symbols" by the kconfig language) are defined in Kconfig files under the /src directory.
PX4 Kconfig Symbol Naming Convention
By convention, symbols for modules/drivers are named based on the module folder path. For example, the symbol for the ADC driver at src/drivers/adc/board_adc must be named DRIVERS_ADC_BOARD_ADC.
To add symbols for driver/module specific options, the naming convention is the module name followed by the option name. For example UAVCAN_V1_GNSS_PUBLISHER which is an option GNSS_PUBLISHER for the UAVCAN_V1 module. The options have to be guarded behind an if statement to ensure that the options are only visible when the module itself is enabled.
Full example:
menuconfig DRIVERS_UAVCAN_V1
bool "UAVCANv1"
default n
---help---
Enable support for UAVCANv1
if DRIVERS_UAVCAN_V1
config UAVCAN_V1_GNSS_PUBLISHER
bool "GNSS Publisher"
default n
endif #DRIVERS_UAVCAN_V1INFO
Builds will silently ignore any missing or miss-spelled modules in the *.px4board configuration file.
PX4 Kconfig Label Inheritance
Each PX4 board must have a default.px4board configuration and can have an optional bootloader.px4board configuration. However you can add also separate configurations under a different label e.g. cyphal.px4board. Note that by default the configuration of cyphal.px4board inherits all settings set in default.px4board. When changing the cyphal.px4board it only stores the delta of the Kconfig keys that are different compared to default.px4board, this is useful to simplify configurations management
INFO
When modifying a Kconfig key in default.px4board it will be modified in all derivative configurations of the same board that had the same config as well.
PX4 Menuconfig Setup
The menuconfig tool is used to modify the PX4 board configuration, adding/removing modules, drivers, and other features.
There are command line and GUI variants, both of which can be launched using the PX4 build shortcuts:
make px4_fmu-v5_default boardconfig
make px4_fmu-v5_default boardguiconfigINFO
Kconfiglib and menuconfig come with the kconfiglib python package, which is installed by the normal ubuntu.sh installation script. If kconfiglib is not installed, you can do so using the command: pip3 install kconfiglib
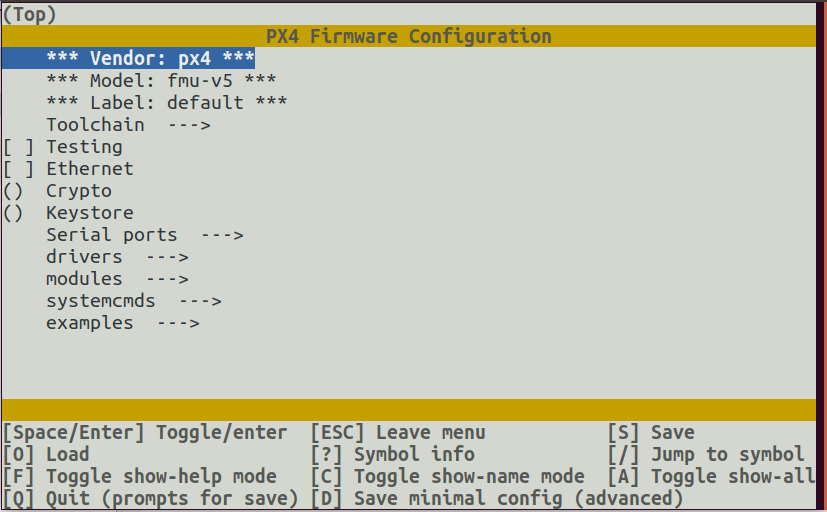
The command line and GUI interfaces are shown below.
menuconfig Command Line Interface
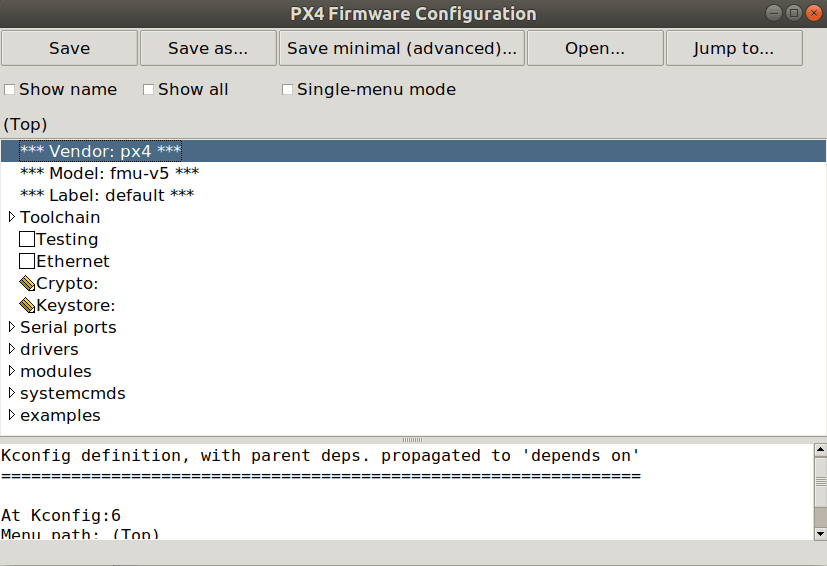
menuconfig GUI Interface