Gazebo Classic Vehicles
This topic lists/displays the vehicles supported by the PX4 Gazebo Classic simulation and the make commands required to run them (the commands are run from a terminal in the PX4-Autopilot directory).
Supported vehicle types include: mutirotors, VTOL, VTOL Tailsitter, Plane, Rover, Submarine/UUV.
INFO
The Gazebo Classic page shows how to install Gazebo Classic, how to enable video and load custom maps, and many other configuration options.
Multicopter
Quadrotor (Default)
sh
make px4_sitl gazebo-classicQuadrotor with Optical Flow
sh
make px4_sitl gazebo-classic_iris_opt_flowQuadrotor with Depth Camera
These models have a depth camera attached, modelled on the Intel® RealSense™ D455.
Forward-facing depth camera:
sh
make px4_sitl gazebo-classic_iris_depth_cameraDownward-facing depth camera:
sh
make px4_sitl gazebo-classic_iris_downward_depth_camera3DR Solo (Quadrotor)
sh
make px4_sitl gazebo-classic_solo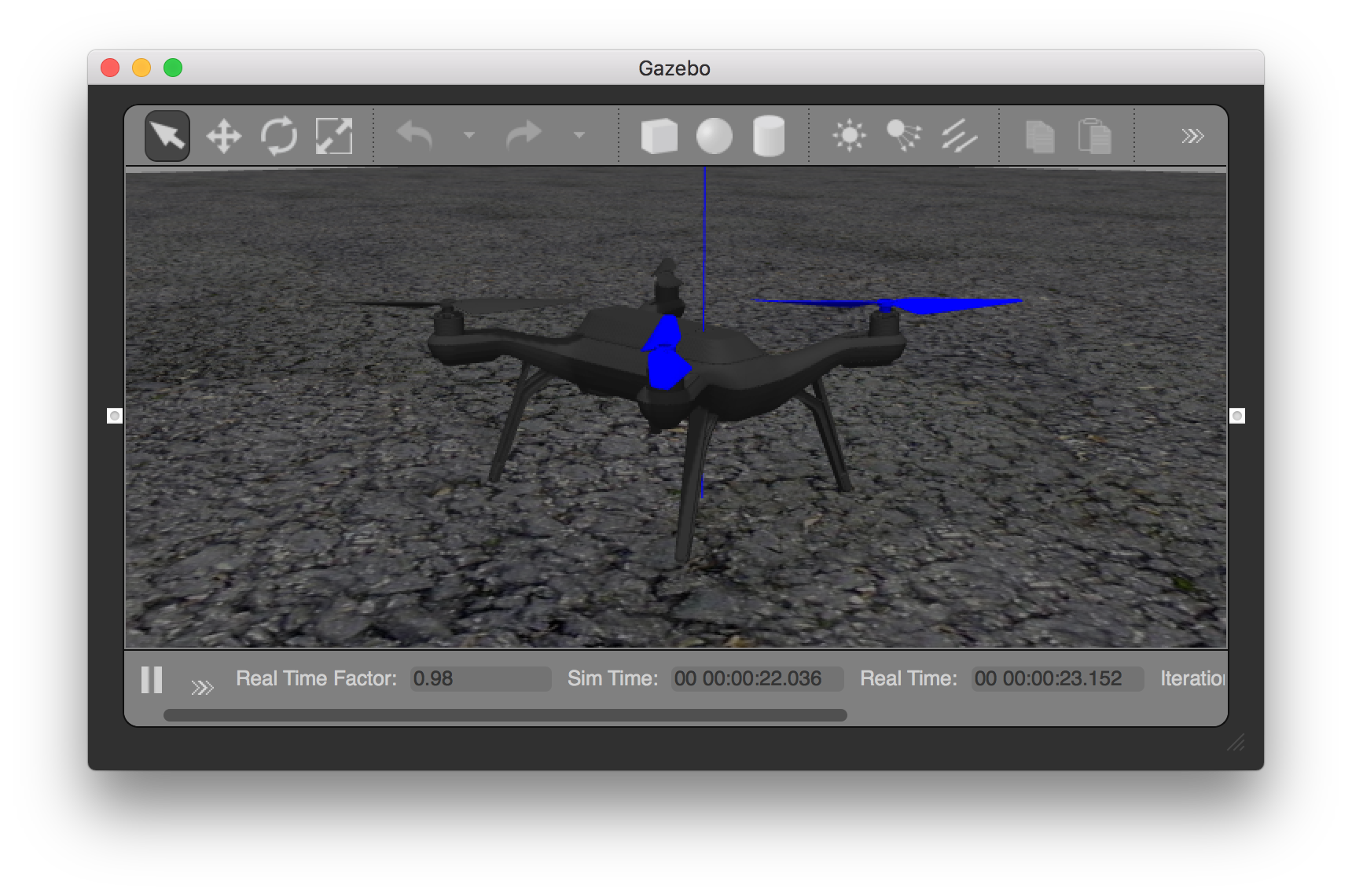
Typhoon H480 (Hexrotor)
sh
make px4_sitl gazebo-classic_typhoon_h480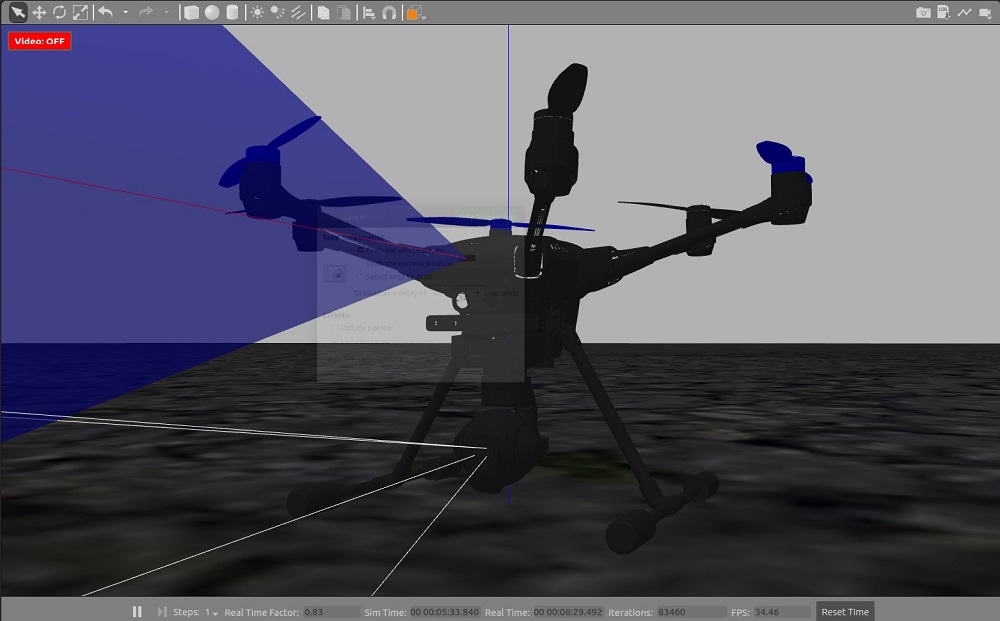
INFO
This target also supports video streaming simulation.
Plane/Fixed-wing
Standard Plane
sh
make px4_sitl gazebo-classic_plane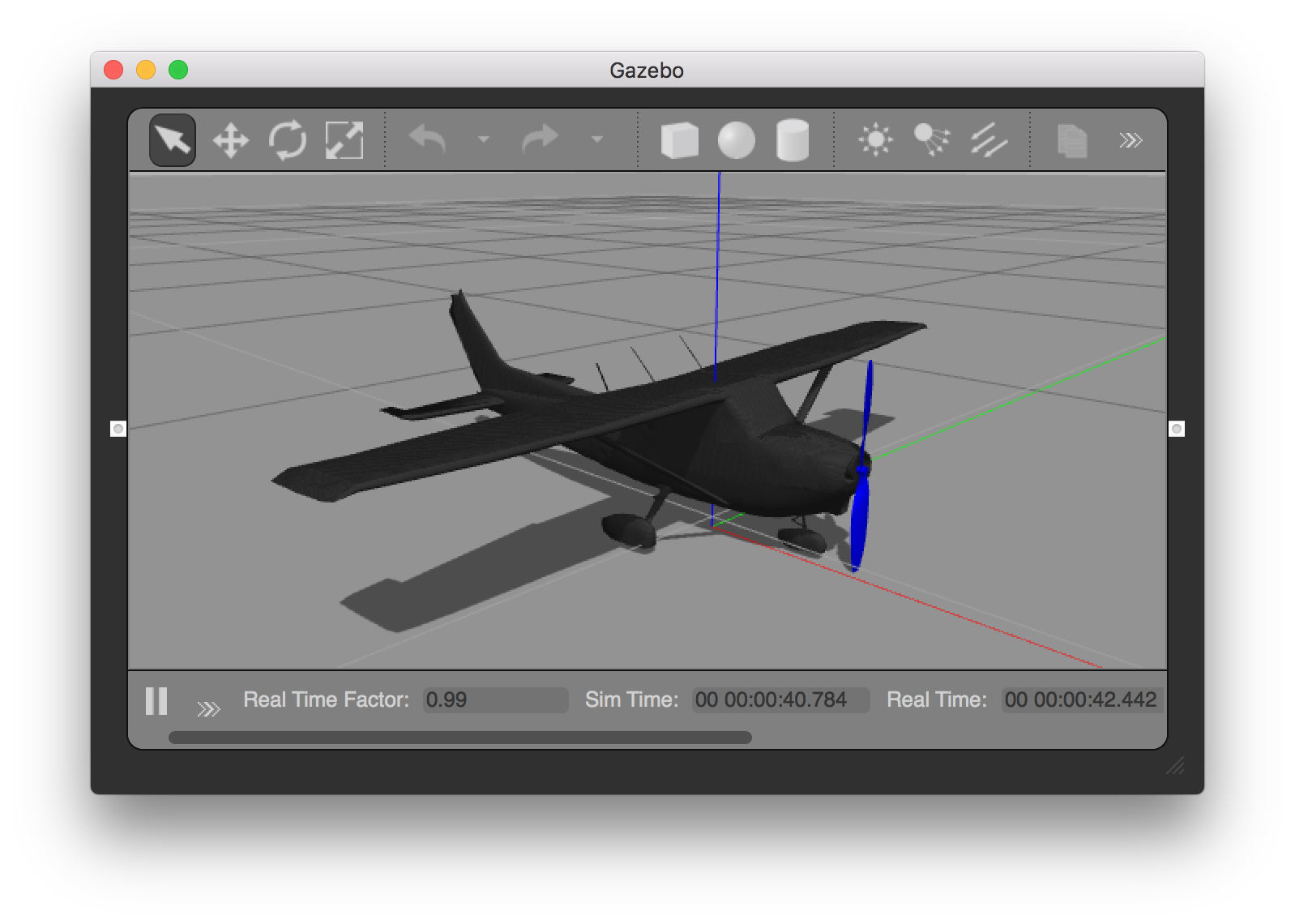
Standard Plane with Catapult Launch
sh
make px4_sitl gazebo-classic_plane_catapultThis model simulates hand/catapult launch, which can be used for fixed-wing takeoff in position mode, takeoff mode, or missions.
The plane will automatically be launched as soon as the vehicle is armed.
VTOL
Standard VTOL
sh
make px4_sitl gazebo-classic_standard_vtol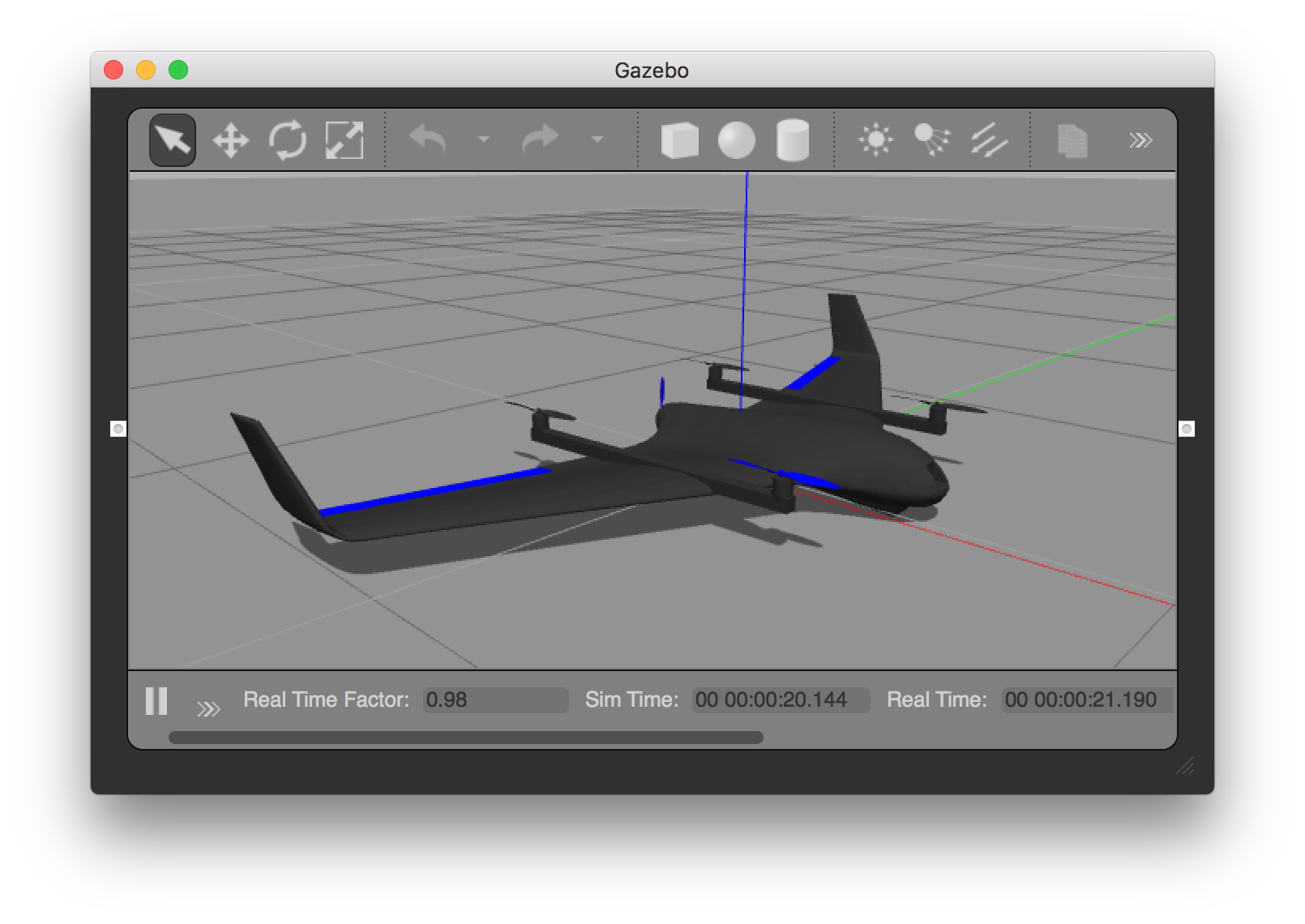
Tailsitter VTOL
sh
make px4_sitl gazebo-classic_tailsitter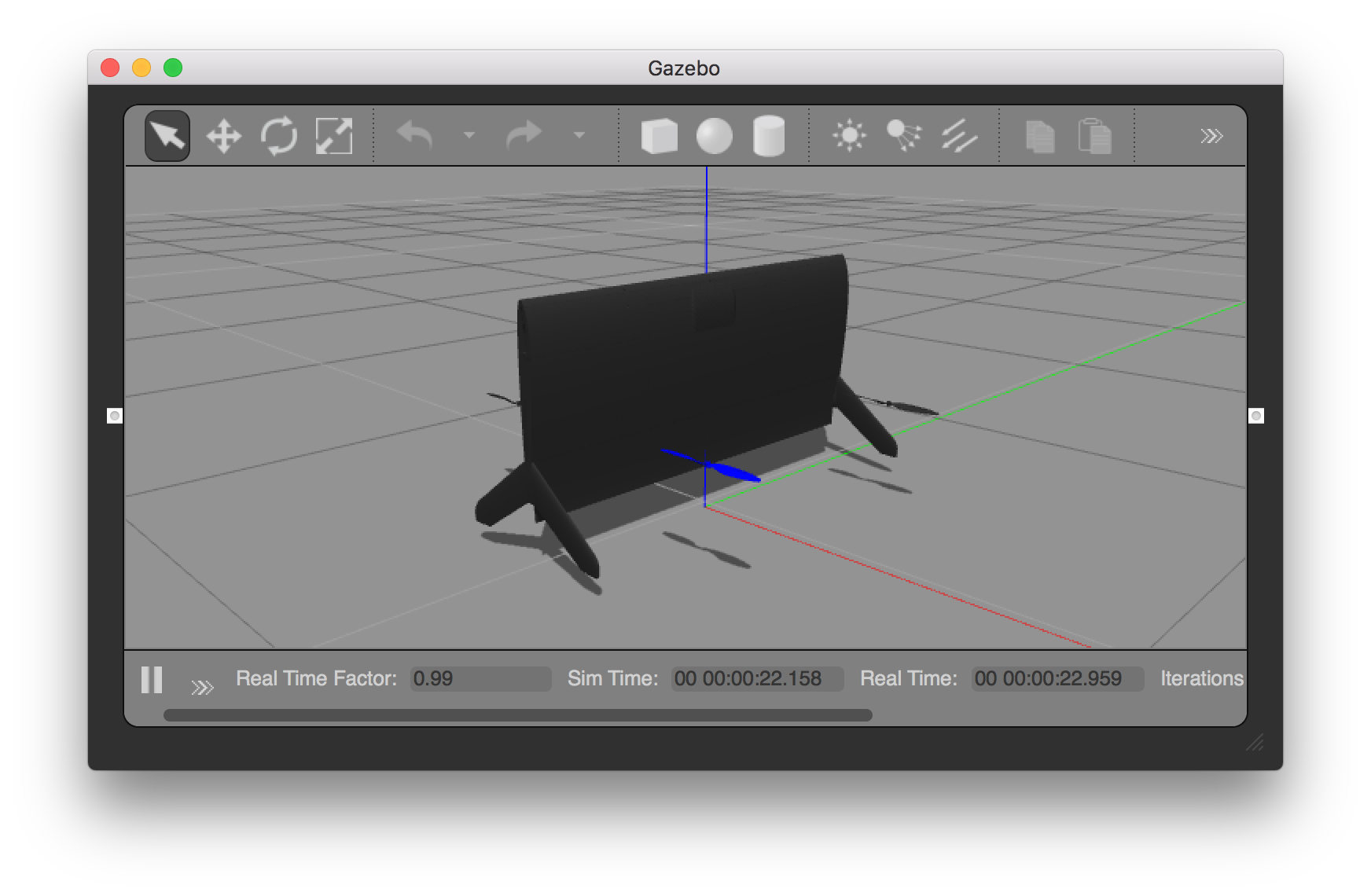
Unmmanned Ground Vehicle (UGV/Rover/Car)
Ackermann UGV
sh
make px4_sitl gazebo-classic_rover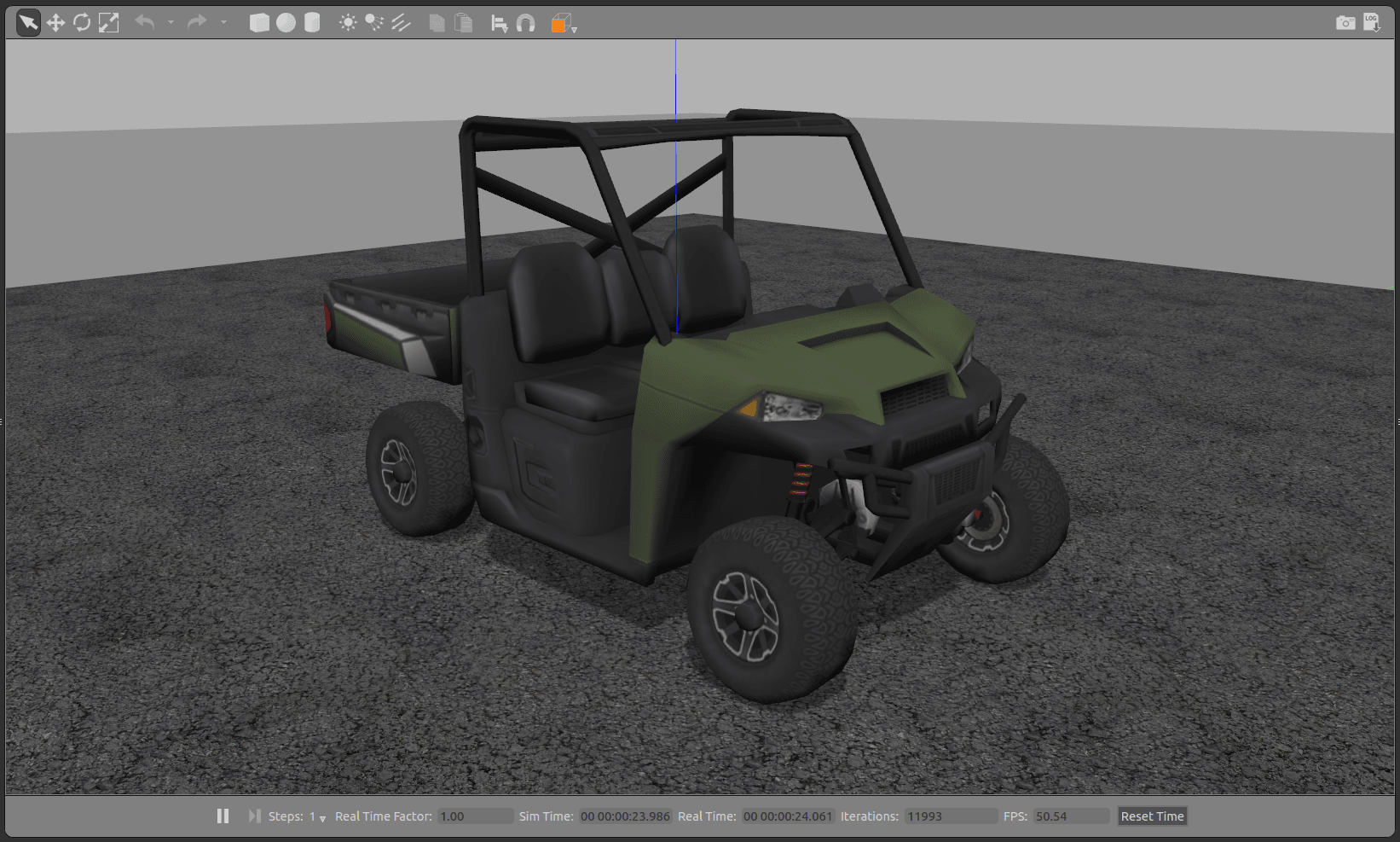
Differential UGV
sh
make px4_sitl gazebo-classic_r1_rover
Unmanned Underwater Vehicle (UUV/Submarine)
HippoCampus TUHH UUV
sh
make px4_sitl gazebo-classic_uuv_hippocampus
Unmanned Surface Vehicle (USV/Boat)
Boat (USV)
sh
make px4_sitl gazebo-classic_boat
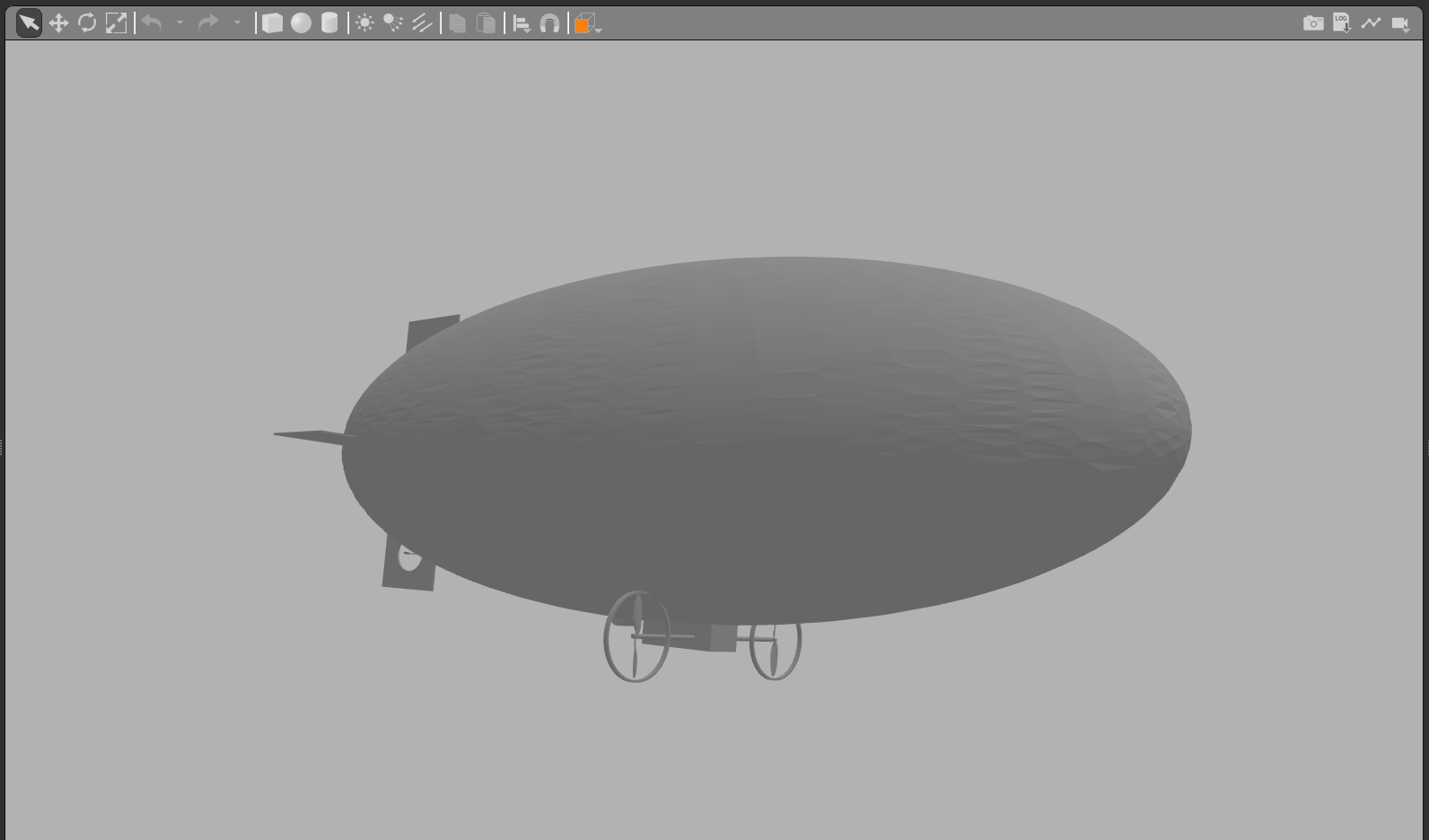
Airship
Cloudship
sh
make px4_sitl gazebo-classic_cloudship