Acro Режим (Мультикоптер)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Необхідний ручний/дистанційний пульт")
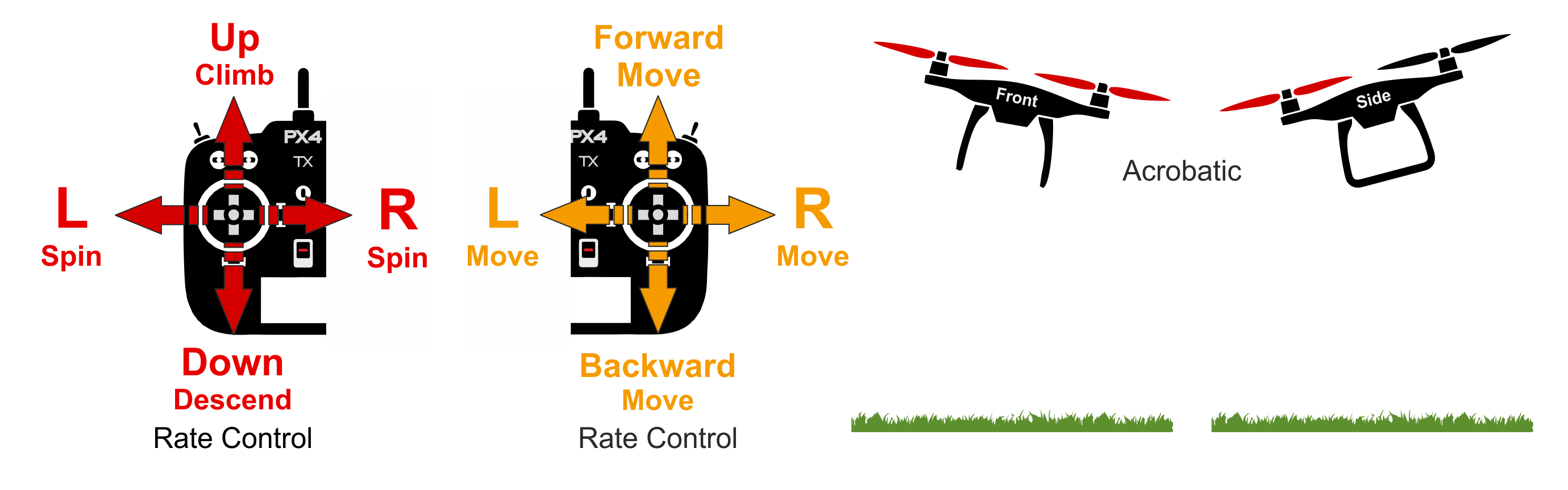
Режим Acro — це режим RC для виконання акробатичних маневрів, наприклад фліпи, креніння та петлі.
Ручки крена, тангажу та риштування керують швидкістю кутової обертання навколо відповідних вісей, а керування тяги безпосередньо передається до розподілу керування. Коли палиці зосереджені, транспортний засіб зупинить обертання, але залишиться в поточному положенні (на боці, перевернутому або що завгодно) та рухатиметься згідно з поточним імпульсом.
Технічний опис
Ручний режим для виконання акробатичних маневрів, наприклад, сальто, перекиди та петлі.
RC Штоки кочення/тангажу/рискання (RPY) контролюють швидкість кутового обертання навколо відповідних осей. Тяга передається напряму до розподілу керування. Коли стіки будуть відцентровані, апарат перестане обертатися, але залишиться у своїй поточній орієнтації (не обов'язково рівний) і рухатиметься відповідно до свого поточного імпульсу.
Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика):
- Крен, Тангаж, Курс: Допомога від автопілота для стабілізації швидкості положення. Положення палиці RC відображає швидкість обертання транспортного засобу в цій орієнтації.
- Дросель: Ручне керування за допомогою стіків RC. RC вхід передається напряму до розподілу керування.
Відображення стіку введення
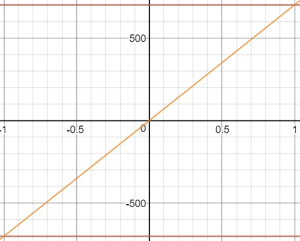
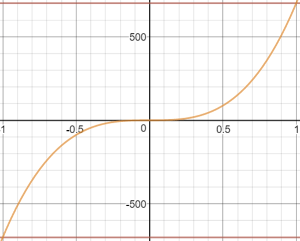
Стандартне відображення стіків уведення рулів крену, тангажу та рискання для режиму Acro показано нижче. Крива дозволяє високу швидкість повороту при максимальному ввімкненні стіку для виконання акробатичних маневрів, а також зону нижчої чутливості близько до центру стіку для невеликих корекцій.
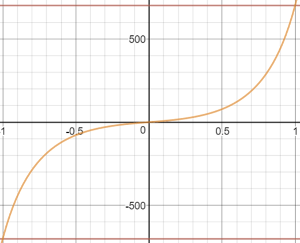
Цей рульовий ввід тангажу та крена може бути налаштований за допомогою параметрів MC_ACRO_EXPO і MC_ACRO_SUPEXPO "експоненційних", тоді як реакція на рульовий вхід на курс налаштовується за допомогою MC_ACRO_EXPO_Y та MC_ACRO_SUPEXPOY. MC_ACRO_EXPO та MC_ACRO_EXPO_Y налаштовують криві між лінійною та кубічною кривою, як показано нижче. MC_ACRO_SUPEXPO та MC_ACRO_SUPEXPOY дозволяють додатково налаштовувати форму, змінюючи ширину області зменшеної чутливості.
INFO
математичне відношення:
f = MC_ACRO_EXPO або MC_ACRO_EXPO_Y, g = MC_ACRO_SUPEXPO або MC_ACRO_SUPEXPOY,і r - максимальна швидкість.
Ви можете експериментувати з відношеннями тут.
Параметри
| Параметр | Опис |
|---|---|
| MC_ACRO_EXPO | Режим "експоненціальний" фактор для налаштування форми кривої вводу стіку для крену та тангажу. Значення: 0 Чисто лінійна вхідна крива 1 Чисто кубічна вхідна крива. Значення за замовчуванням: 0.69. |
| MC_ACRO_EXPO_Y | Режим "експоненціальний" фактор для налаштування форми кривої вводу стіку для рискання. Значення: 0 Чисто лінійна вхідна крива 1 Чисто кубічна вхідна крива. Значення за замовчуванням: 0.69. |
| MC_ACRO_SUPEXPO | Фактор режиму Acro "SuperExpo" для вдосконалення форми кривої введення стіків для тангажу та крену (відкориговано з використанням MC_ACRO_EXPO. Значення: 0 Чиста функція Експо, 0.7 розумне покращення форми для інтуїтивного відчуття стіку, 0.95 дуже сильно зігнута крива впливає лише близько до максимуму. Значення за замовчуванням: 0.7. |
| MC_ACRO_SUPEXPOY | Фактор режиму Acro "SuperExpo" для вдосконалення форми кривої введення стіків для вісі рискання (відкориговано з використанням MC_ACRO_EXPO_Y. Значення: 0 Чиста функція Експо, 0.7 розумне покращення форми для інтуїтивного відчуття стіку, 0.95 дуже сильно зігнута крива впливає лише близько до максимуму. Значення за замовчуванням: 0.7. |
| MC_ACRO_P_MAX | Максимальний кут нахилу тангажу. За замовчуванням: 2 оберти на секунду (720,0 град/с). |
| MC_ACRO_R_MAX | Максимальний кут нахилу крену. За замовчуванням: 2 оберти на секунду (720,0 град/с). |
| MC_ACRO_Y_MAX | Максимальний кут рискання. За замовчуванням: 1.5 оберти на секунду (540.0 градусів/с). |