Advanced Flight Controller Orientation Tuning
These instructions can be used to manually fine-tune the orientation and horizon level, for example to correct for small sensor board misalignments or minor calibration errors.
If there is a persistent drift bias (often seen in multirotors but not limited to them), it is a good strategy to trim it with the help of these fine-tuning offset angle parameters, instead of using the trimmers of your RC Transmitter. This ensures the vehicle will maintain the trimming when in fully autonomous flight.
INFO
These instructions are "advanced", and not recommended for regular users (the broad tuning is generally sufficient).
Setting Orientation Parameters
The SENS_BOARD_ROT parameter defines the rotation of the flight controller board relative to the vehicle frame, while the fine tuning offsets (SENS_BOARD_X_OFF, SENS_BOARD_Y_OFF, SENS_BOARD_Z_OFF) set the rotation of the sensors relative to the board itself. The fine tuning offsets are added to the SENS_BOARD_ROT angle in order to determine the total offset angles for the Yaw, Pitch and Roll orientation of the flight controller.
First perform the normal calibration for Flight Controller Orientation and Level Horizon Calibration to set the SENS_BOARD_ROT parameter.
The other parameters can then be set in order to fine-tune the orientation of the IMU sensors relative to the board itself.
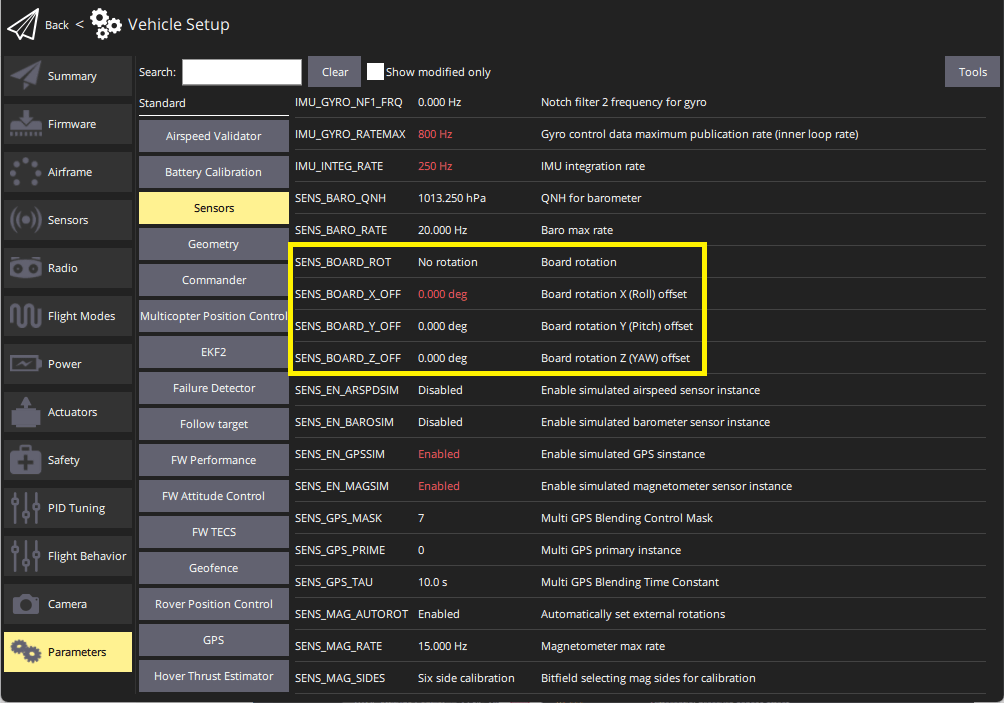
You can locate the parameters in QGroundControl as shown below:
Open QGroundControl menu: Settings > Parameters > Sensor Calibration.
The parameters as located in the section as shown below (or you can search for them):
Parameter Summary
- SENS_BOARD_ROT: Rotation of the FMU board relative to the vehicle frame.
- SENS_BOARD_X_OFF: Rotation, in degrees, around PX4FMU's X axis or Roll axis. Positive angles increase in CCW direction, negative angles increase in CW direction.
- SENS_BOARD_Y_OFF: Rotation, in degrees, around PX4FMU's Y axis or Pitch axis. Positive angles increase in CCW direction, negative angles increase in CW direction.
- SENS_BOARD_Z_OFF: Rotation, in degrees, around PX4FMU's Z axis Yaw axis. Positive angles increase in CCW direction, negative angles increase in CW direction.