PX4 Конфігурація плати (kconfig)
Прошивку автопілота PX4 можна налаштувати під час компіляції для пристосування його до спеціалізованих застосувань (фіксований крило, багатокоптер, рухомий об'єкт або інше), щоб увімкнути нові та експериментальні функції (такі як Cyphal) або заощадити використання флеш-пам'яті& RAM, вимкнувши деякі драйвери та підсистеми. Ця конфігурація обробляється через Kconfig, який є тим самим системою конфігурації, що використовується NuttX.
Опції конфігурації (часто називаються "символами" мовою kconfig) визначаються в файлах Kconfig у каталозі /src.
Конвенція найменування символів PX4 Kconfig
За умовчанням символи для модулів/драйверів називаються на основі шляху папки модуля. Наприклад, символ для водія ADC у src/drivers/adc/board_adc повинен мати назву DRIVERS_ADC_BOARD_ADC.
Для додавання символів для параметрів, специфічних для драйвера/модуля, конвенція найменування полягає в тому, що за ім'ям модуля слідує назва параметра. Наприклад UAVCAN_V1_GNSS_PUBLISHER, який є варіантом GNSS_PUBLISHER для модуля UAVCAN_V1. Параметри повинні бути захищені за допомогою оператора if, щоб гарантувати, що вони будуть видимі лише тоді, коли сам модуль увімкнено.
Наприклад:
menuconfig DRIVERS_UAVCAN_V1
bool "UAVCANv1"
default n
---help---
Enable support for UAVCANv1
if DRIVERS_UAVCAN_V1
config UAVCAN_V1_GNSS_PUBLISHER
bool "GNSS Publisher"
default n
endif #DRIVERS_UAVCAN_V1Збірки будуть беззвучно ігнорувати будь-які відсутні або неправильно написані модулі у конфігураційному файлі *.px4board
Успадкування мітки PX4 Kconfig
Кожній платі PX4 повинна мати конфігурацію default.px4board і може мати необов'язкову конфігурацію bootloader.px4board configuration. Проте ви також можете додати окремі конфігурації під іншою міткою, наприклад cyphal.px4board. Зверніть увагу, що за замовчуванням конфігурація cyphal.px4board успадковує всі налаштування, встановлені в default.px4board. При зміні cyphal.px4board воно зберігає лише дельту ключів Kconfig, які відрізняються від default.px4board, це корисно для спрощення управління конфігураціями
При зміні ключа Kconfig in за замовчуванням. x4board буде змінено в усіх конфігураціях похідної таблиці з тими ж самими конфігураціями і в тому ж форматі.
:::
Налаштування меню PX4 Menuconfig
Інструмент menuconfig використовується для зміни конфігурації плати PX4, додавання/видалення модулів, драйверів та інших функцій.
Існують варіанти командного рядка та графічного інтерфейсу, які можна запустити за допомогою скорочень збірки PX4:
make px4_fmu-v5_default boardconfig
make px4_fmu-v5_default boardguiconfigKconfiglib та menuconfig поставляються з пакетом python kconfiglib, який встановлюється звичайним сценарієм встановлення ubuntu.sh. Якщо kconfiglib не встановлено, ви можете це зробити за допомогою команди: pip3 install kconfiglib
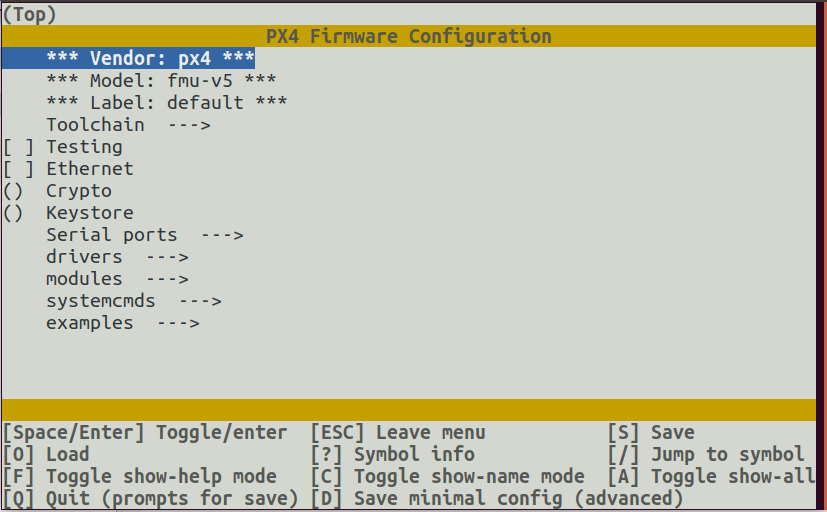
Інтерфейс командного рядка та графічного інтерфейсу показані нижче.
Інтерфейс командного рядка menuconfig
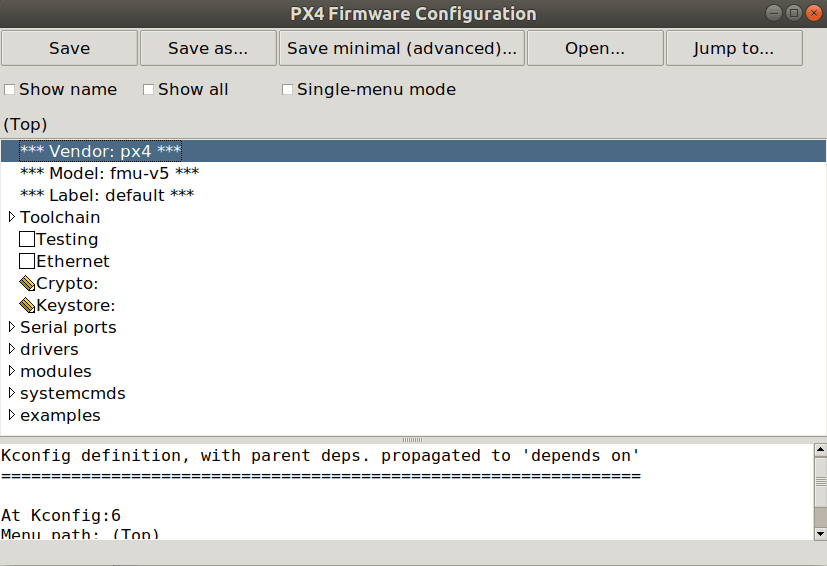
Інтерфейс користувача menuconfig GUI