飞控方向的高级调参
方向和水平可以用参数手动调整,以校正传感器板的小误差或者校准误差。
If there is a persistent drift bias (often seen in multirotors but not limited to them), it is a good strategy to trim it with the help of these fine-tuning offset angle parameters, instead of using the trimmers of your RC Transmitter. 对于基本设置,请遵循下面链接的说明:
INFO
These instructions are "advanced", and not recommended for regular users (the broad tuning is generally sufficient).
方向参数设置
如果存在持续的漂移偏差(通常存在于多旋翼中,但不仅限于多旋翼),一个比较好的方法是可以通过微调偏移角度参数的帮助,去除该偏差,而不是使用遥控发射器的微调器。 这样,飞机在完全自主的飞行中将保持调整修正。
更改方向参数:
The other parameters can then be set in order to fine-tune the orientation of the IMU sensors relative to the board itself.
You can locate the parameters in QGroundControl as shown below:
Open QGroundControl menu: Settings > Parameters > Sensor Calibration.
The parameters as located in the section as shown below (or you can search for them):
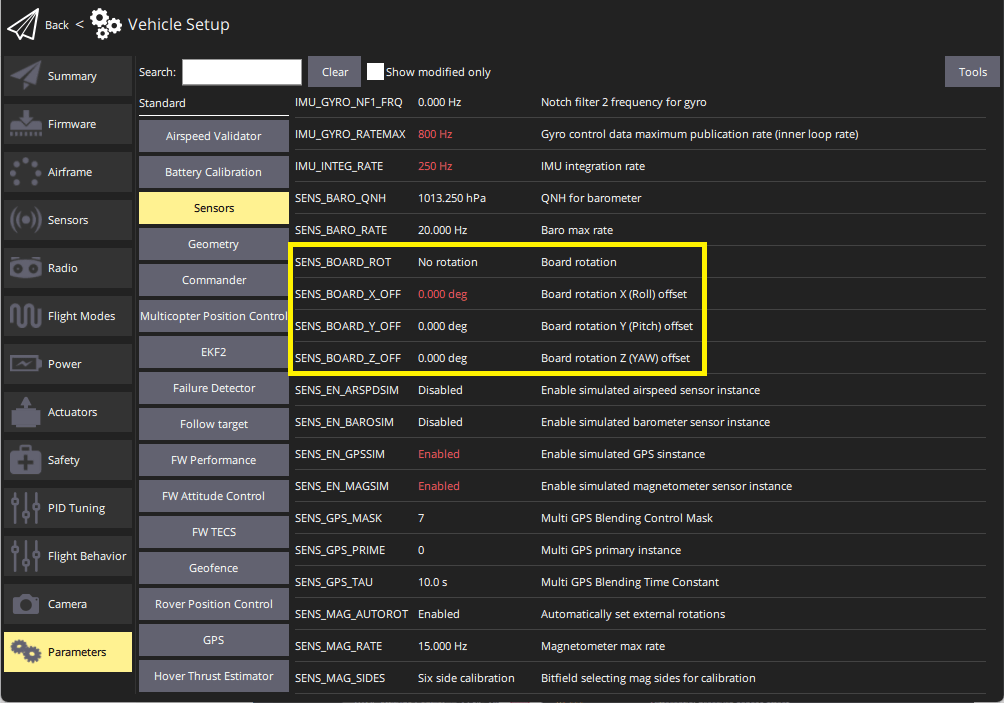
Parameter Summary
- SENS_BOARD_ROT: Rotation of the FMU board relative to the vehicle frame.
- SENS_BOARD_X_OFF: Rotation, in degrees, around PX4FMU's X axis or Roll axis. Positive angles increase in CCW direction, negative angles increase in CW direction.
- SENS_BOARD_Y_OFF: Rotation, in degrees, around PX4FMU's Y axis or Pitch axis. Positive angles increase in CCW direction, negative angles increase in CW direction.
- SENS_BOARD_Z_OFF: Rotation, in degrees, around PX4FMU's Z axis Yaw axis. Positive angles increase in CCW direction, negative angles increase in CW direction.