ModalAI VOXL Flight
PX4 v1.11PX4 не виробляє цей (чи будь-який інший) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності.
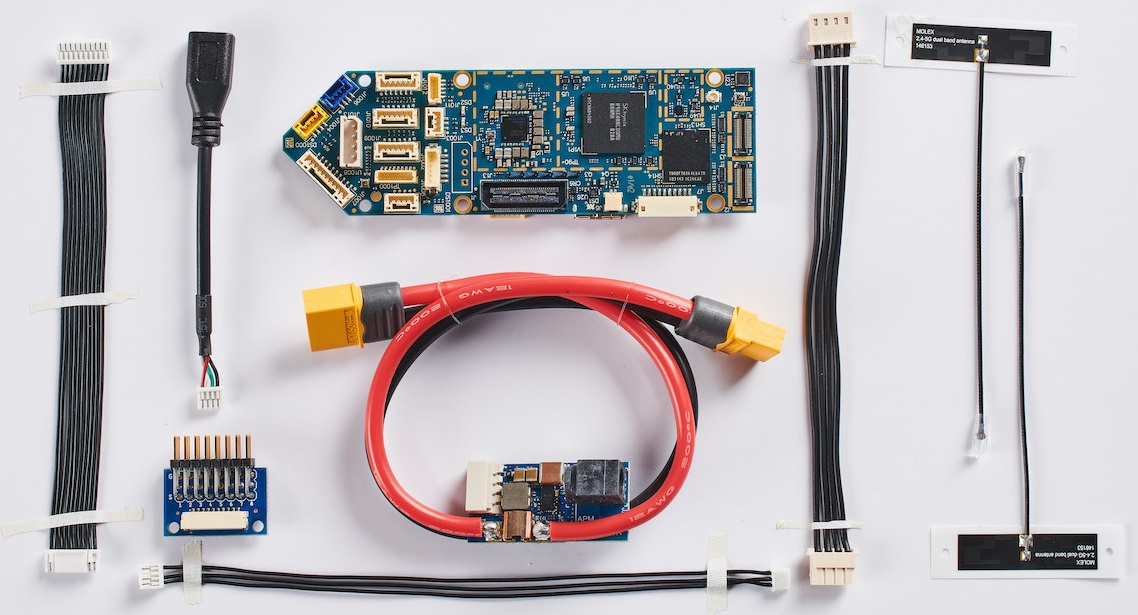
Voxl Flight від ModalAI VOXL Flight (Технічні характеристики) є однією з перших обчислювальних платформ, яка поєднує потужність та вишуканість Snapdragon з гнучкістю та зручністю використання PX4 на STM32F7. Виготовлений у США, VOXL Flight підтримує уникнення перешкод та навігацію без сигналу GPS (в приміщенні), поєднуючи це з контролером польоту PX4 на одній платі.
Цей контролер польоту підтримується виробником.
Характеристики
Система
| Характеристика | Подробиці |
|---|---|
| Вага | 26 г |
Супутні комп'ютери
| Характеристика | Подробиці |
|---|---|
| Базова операційна система | Linux Yocto Jethro з ядром 3.18. Додаткові операційні системи Linux можна використовувати, запускаючи Docker на VOXL, деталі тут |
| Обчислення | Qualcomm Snapdragon 821 з 4 ГБ LPDDR4 1866 МГц, Snapdragon 821 Datasheet, Документи |
| CPU | Чотирьохядерний процесор до 2,15 ГГц |
| GPU | Графічний процесор Adreno 530 на частоті 624МГц |
| Обчислення DSP | Шестизначний цифровий сигнальний процесор (cDSP) 825МГц |
| Сенсор DSP | Шестизначний сенсор DSP (sDSP) 700МГц |
| Відео | Захоплення відео 4k30 h.264/5 w/ 720p FPV |
| Інтерфейси камери | Підтримка MIPI-CSI2, USB UVC, HDMI |
| Wi-Fi | Ппопередньо сертифікований модуль Wi-Fi, QCNFA324 FCC ID:PPD-QCNFA324, модем QCA6174A, 802.11ac 2x2 Dual-band, Bluetooth 4.2 (двохрежимний) |
| 4G LTE | Додатковий модуль, що доступний за вибором |
| Microhard pDDL | Додатковий модуль, що доступний за вибором |
| GNSS | WGR7640 10Гц |
| I/O | 1x USB3.0 OTG (порт ADB), 1x USB2.0 (порт розширення), 2x UART, 3x I2C, додаткові GPIO та SPI можуть бути налаштовані |
| Сховище | 32ГБ (UFS 2.0), картка Micro SD |
| Програмне забезпечення | Docker, OpenCV 2.4.11, 3.4.6, 4.2, ROS Indigo, SDK Qualcomm Machine Vision SDK, подивіться на GitLab безліч прикладів з відкритим кодом! |
| IMUs | ICM-42688 (SPI10), ICM-20948 (SPI1) |
| Барометр | BMP280 |
Політний контролер
| Характеристика | Подробиці |
|---|---|
| MCU | 216МГц, 32-бітний ARM М7 STM32F765II |
| Пам'ять | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| Прошивка | PX4 |
| IMUs | ICM-20602 (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (SPI6) | |
| Барометр | BMP388 (I2C4) |
| Елемент захисту | A71CH (I2C4) |
| Карта microSD | Інформація про підтримувані картки |
| Входи | GPS/Mag |
| Spektrum | |
| Телеметрія | |
| CAN шина | |
| PPM | |
| Виходи | 6 LEDs (2xRGB) |
| 8 PWM каналів | |
| Додаткові інтерфейси | 3 послідовні порти |
| I2C | |
| GPIO |
Докладнішу документацію щодо апаратного забезпечення можна знайти тут.
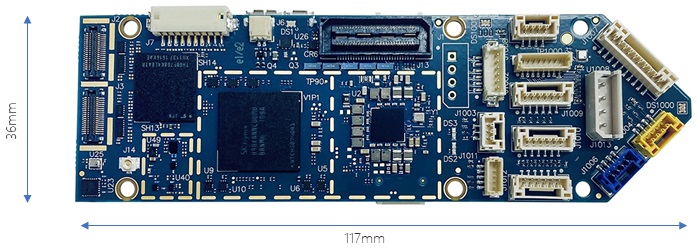
Розміри
Сумісність прошивки PX4
Політ VOXL повністю сумісний з офіційною прошивкою PX4 від PX4 v1.11.
ModalAI підтримує гілка версії PX4 для PX4 v1.11. Це включає підтримку UART ESC та поліпшення в VIO та VOA, які планується включити в основний код.
Додаткову інформацію про прошивку можна знайти тут.
Підтримка QGroundControl
Ця плата підтримується в QGroundControl 4.0 та пізніше.
Доступність
- Комплект VOXL Flight Complete
- Плата керування VOXL Flight (тільки)
- VOXL Flight, інтегрований з камерами уникання перешкод (VOXL Flight Deck) (Datasheet)
- VOXL Flight в готовому до польоту Development Drone VOXL m500 (Datasheet)
Швидкий старт
Quickstarts від постачальника розташовані тут.
voxl-vision-px4
VOXL Flight виконує voxl-vision-px4 на обчислювальній частині апаратного забезпечення, що служить в якості виду посередника MAVLink. Для отримання детальної інформації вихідний код доступний тут
Конектори
Докладну інформацію про розпіновку можна знайти тут.
Top
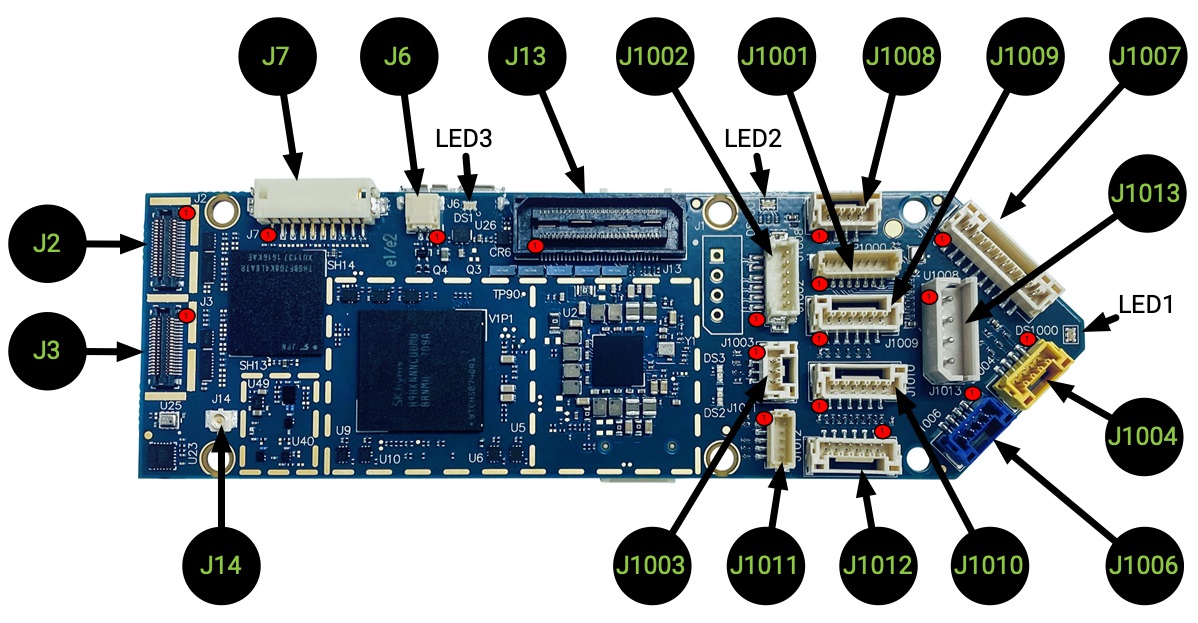
Примітка: Роз'єми серії 1000 доступні з STM32/PX4
| З’єднання | Опис | Використовується |
|---|---|---|
| J2 | Датчик зображення 4k (CSI0) високої якості | Snapdragon - Linux |
| J3 | Стерео Датчик Зображення (CSI1) | Snapdragon - Linux |
| J6 | Конектор вентилятора охолодження | Snapdragon - Linux |
| J7 | BLSP6 (GPIO) та BLSP9 (UART) | Snapdragon - Linux |
| J13 | Expansion B2B | Snapdragon - Linux |
| J14 | Підключення вбудованої антени GNSS | Snapdragon - Linux |
| J1001 | Програмний та відлагоджувальний/UART3 | STM32 - PX4 |
| J1002 | UART ESC, UART2/TELEM3 | STM32 - PX4 |
| J1003 | PPM RC In | STM32 - PX4 |
| J1004 | Вхід RC, Spektrum/SBus/UART6 | STM32 - PX4 |
| J1006 | Роз'єм USB 2.0 (PX4/QGroundControl) | STM32 - PX4 |
| J1007 | 8-Канальний вихід PWM/DShot | STM32 - PX4 |
| J1008 | CAN шина | STM32 - PX4 |
| J1009 | I2C3, UART4 | STM32 - PX4 |
| J1010 | Телеметрія (TELEM1) | STM32 - PX4 |
| J1011 | I2C2, кнопка безпеки | STM32 - PX4 |
| J1012 | Зовнішній GPS & Mag, UART1, I2C1 | STM32 - PX4 |
| J1013 | Вхід живлення, I2C3 | STM32 - PX4 (живить весь систему) |
Низ
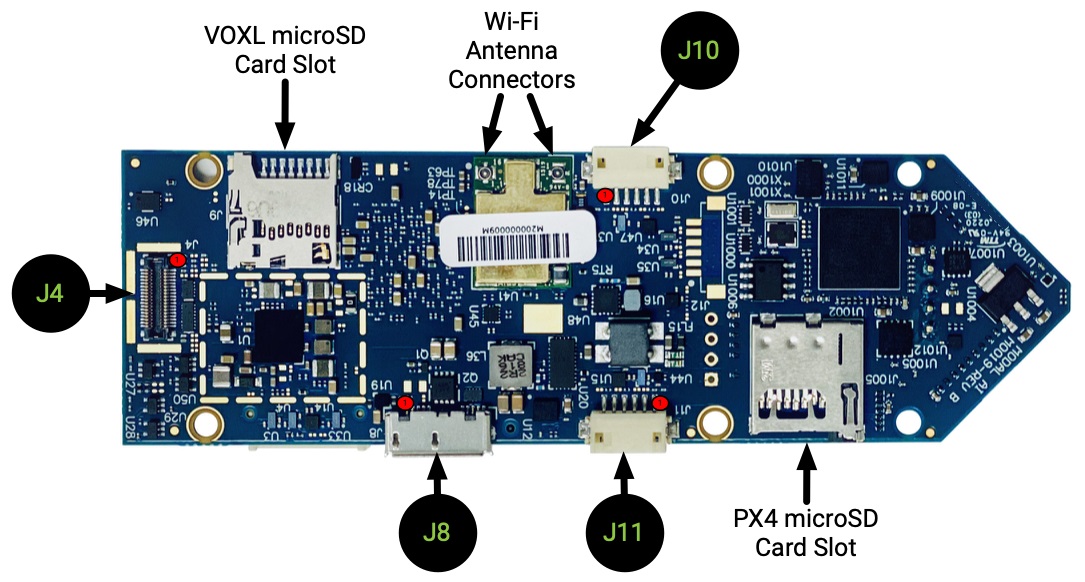
Примітка: Роз'єми серії 1000 доступні з STM32/PX4
| З’єднання | Опис | Використовується |
|---|---|---|
| J4 | Датчик відстеження / оптичного потоку зображення (CSI2) | Snapdragon - Linux |
| J8 | USB 3.0 OTG | Snapdragon - Linux, adb |
| J10 | BLSP7 UART та I2C off-board | Snapdragon - Linux |
| J11 | BLSP12 UART та I2C off-board | Snapdragon - Linux |
| VOXL microSD | Snapdragon - Linux | |
| PX4 microSD | 32Gb Max | STM32 - PX4 |
| Wi-Fi Antennas | У комплекті | Snapdragon - Linux |
Посібник користувача
Повний посібник користувача доступний тут.
Як зібрати
Щоб зібрати PX4 для цієї цілі:
make modalai_fc-v1Зіставлення послідовних портів
Примітка: відображені відображення стосуються лише керованих інтерфейсів PX4
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J1012) |
| USART2 | /dev/ttyS1 | TELEM3 (J1002) |
| USART3 | /dev/ttyS2 | Консоль відладки (J1001) |
| UART4 | /dev/ttyS3 | Розширення UART (J6) |
| UART5 | /dev/ttyS4 | UART між PX4 та Комп'ютером-компаньйоном |
| USART6 | /dev/ttyS5 | RC (J1004) |
| UART7 | /dev/ttyS6 | TELEM1 (J1010) |
| UART8 | /dev/ttyS7 | N/A |
Підтримка
Будь ласка, відвідайте Форум ModalAI для отримання додаткової інформації.