ModalAI VOXL Flight
PX4 v1.11ModalAI VOXL Flight (데이터시트)는 Snapdragon의 강력함과 정교함을 STM32F7에서 PX4의 유연성과 사용자 용이성이 결합한 최초의 컴퓨팅 플랫폼중 하나입니다. 미국에서 제작된 VOXL Flight는 단일 PCB에서 PX4 비행 컨트롤러와 결합된 장애물 회피와 GPS 거부 (실내) 내비게이션을 지원합니다. :::
The ModalAI VOXL Flight (Datasheet) is one of the first computing platforms to combine the power and sophistication of Snapdragon with the flexibility and ease of use of PX4 on an STM32F7. Made in the USA, VOXL Flight supports obstacle avoidance and GPS-denied (indoor) navigation fused with a PX4 flight controller on a single PCB.
:::note 자세한 하드웨어 문서는 여기를 참고하십시오. :::
사양
시스템
| 항목 | 세부 정보 |
|---|---|
| 중량 | 26 g |
보조 컴퓨터
| 항목 | 세부 정보 |
|---|---|
| 기본 운영 시스템 | 3.18 커널을 사용하는 Linux Yocto Jethro. 추가 Linux 운영체제는 VOXL에서 Docker를 실행하여 사용할 수 있습니다. 자세한 내용은 여기를 참조하십시오. |
| 계산 | Qualcomm Snapdragon 821(4GB LPDDR4 1866MHz 포함), Snapdragon 821 데이터시트, 문서 |
| CPU | 최대 2.15GHz의 쿼드 코어 CPU |
| GPU | 624MHz의 Adreno 530 GPU |
| DSP 컴퓨팅 | Hexagon compute DSP (cDSP) 825MHz |
| 센서 DSP | Hexagon 센서 DSP (sDSP) 700MHz |
| 비디오 | 4k30 비디오 캡처 h.264/5 w/ 720p FPV |
| Camera Interfaces | MIPI-CSI2, USB UVC, HDMI 지원 |
| Wi-Fi | 사전 인증된 Wi-Fi 모듈 QCNFA324 FCC ID : PPD-QCNFA324, QCA6174A 모뎀, 802.11ac 2x2 듀얼 밴드, Bluetooth 4.2(듀얼 모드) |
| 4G LTE | 옵션 추가 모듈 |
| Microhard pDDL | 옵션 추가 모듈 |
| GNSS | WGR7640 10Hz |
| I/O | 1x USB3.0 OTG (ADB 포트), 1x USB2.0 (확장 포트), 2x UART, 3x I2C, 추가 GPIO 및 SPI 설정 가능 |
| 저장 장치 | 32GB (UFS 2.0), Micro SD 카드 |
| 소프트웨어 | Docker, OpenCV 2.4.11, 3.4.6, 4.2, ROS Indigo, Qualcomm Machine Vision SDK, 많은 오픈 소스 예제는 GitLab을 참조하십시오. |
| 관성계 | ICM-42688 (SPI10), ICM-20948 (SPI1) |
| 기압계 | BMP280 |
비행 콘트롤러
| 항목 | 세부 정보 |
|---|---|
| MCU | 216MHz, 32-bit ARM M7 STM32F765II |
| 메모리 | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| 펌웨어 | PX4 |
| 관성계 | ICM-20602 (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (SPI6) | |
| 기압계 | BMP388 (I2C4) |
| 보안 요소 | A71CH (I2C4) |
| microSD 카드 | 지원되는 카드 정보 |
| 입력 | GPS/자력계 |
| Spektrum | |
| 텔레메트리 | |
| CAN 버스 | |
| PPM | |
| 출력 | LED 6 개 (2xRGB) |
| PWM 채널 8개 | |
| 추가 인터페이스 | 시리얼포트 3개 |
| I2C | |
| GPIO |
More detailed hardware documentation can be found here.
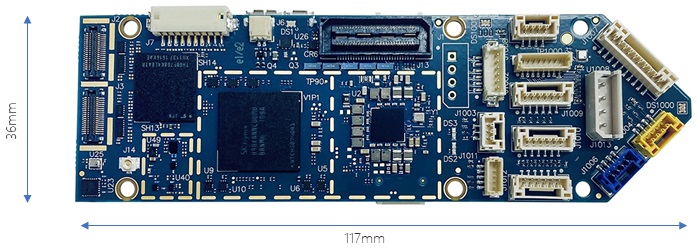
크기
PX4 Firmware Compatibility
VOXL Flight is fully compatible with the official PX4 Firmware from PX4 v1.11.
ModalAI maintains a branched PX4 version for PX4 v1.11. This includes UART ESC support and improvements in VIO and VOA that are planned to be upstreamed.
이 보드는 QGroundControl 4.0 이상에서 지원됩니다.
QGroundControl 지원
공급 업체의 퀵 스타트 가이드는 여기를 참고하십시오.
구매처
- VOXL Flight Complete 키트
- VOXL Flight 보드 (전용)
- 장애물 회피 카메라와 통합된 VOXL Flight(VOXL Flight Deck) (데이터시트)
- VOXL Flight in a ready to fly VOXL m500 Development Drone (데이터시트)
빠른 시작
A quickstart from the vendor is located here.
voxl-vision-px4
The VOXL Flight runs voxl-vision-px4 on the companion computer portion of the hardware serving as a sort of MAVLink proxy. For details, the source code is available here
커넥터
Detailed information about the pinouts can be found here.
상단
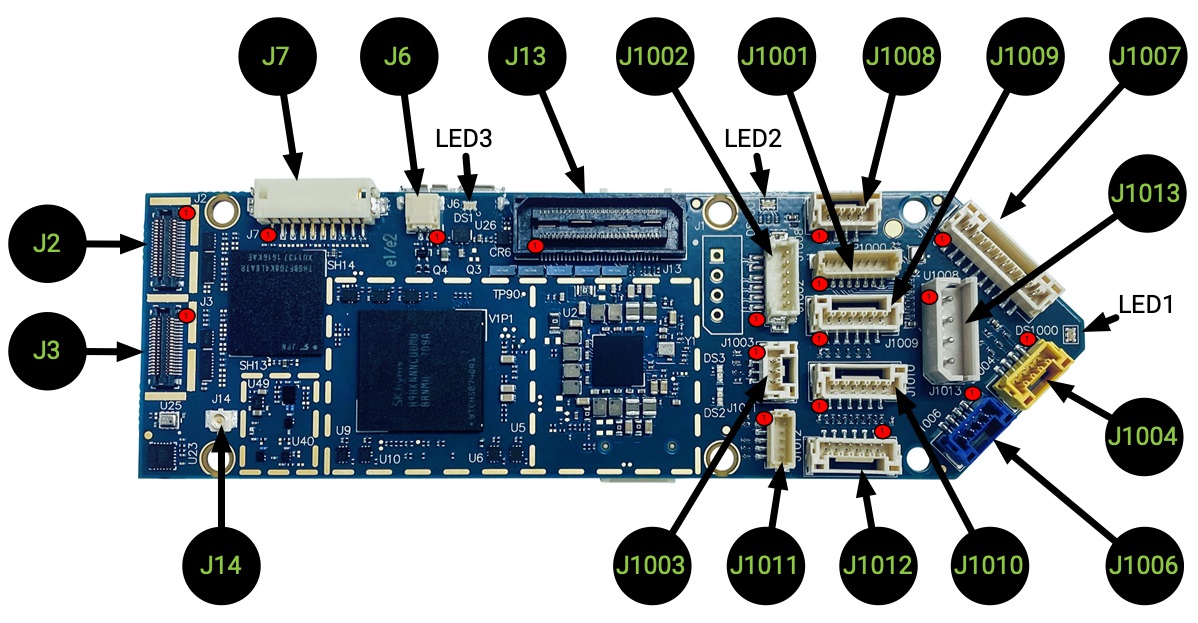
Note: 1000 Series connectors accessible from the STM32/PX4
| 커넥터 | 요약 | 사용처 |
|---|---|---|
| J2 | 4k 이미지 센서 (CSI0) 고용 | Snapdragon - 리눅스 |
| J3 | 스테레오 이미지 센서 (CSI1) | Snapdragon - 리눅스 |
| J6 | 냉각 팬 커넥터 | Snapdragon - 리눅스 |
| J7 | BLSP6 (GPIO) and BLSP9 (UART) | Snapdragon - 리눅스 |
| J13 | 확장 B2B | Snapdragon - 리눅스 |
| J14 | 통합 GNSS 안테나 연결 | Snapdragon - 리눅스 |
| J1001 | 프로그래밍 및 디버그/UART3 | STM32 - PX4 |
| J1002 | UART ESC, UART2/TELEM3 | STM32 - PX4 |
| J1003 | PPM RC 입력 | STM32 - PX4 |
| J1004 | RC 입력, Spektrum/SBus/UART6 | STM32 - PX4 |
| J1006 | USB 2.0 커넥터(PX4/QGroundControl) | STM32 - PX4 |
| J1007 | 8 채널 PWM/DShot 출력 | STM32 - PX4 |
| J1008 | CAN 버스 | STM32 - PX4 |
| J1009 | I2C3, UART4 | STM32 - PX4 |
| J1010 | 텔레메트리 (TELEM1) | STM32 - PX4 |
| J1011 | I2C2, 안전 버튼 입력 | STM32 - PX4 |
| J1012 | 외부 GPS 및 자력계, UART1, I2C1 | STM32 - PX4 |
| J1013 | 전원 입력, I2C3 | STM32 - PX4 (powers whole system) |
하단
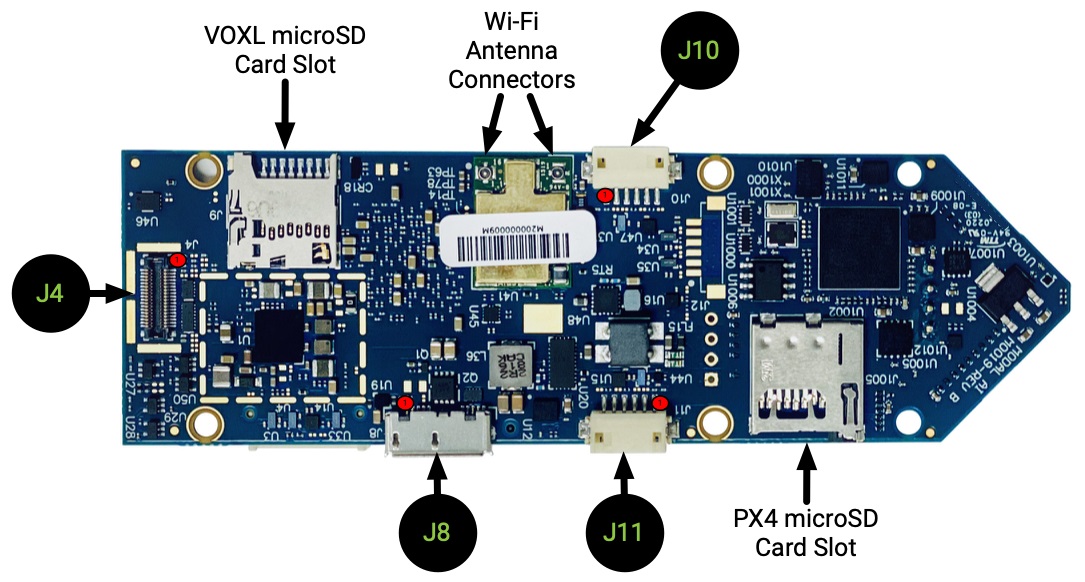
Note: 1000 Series connectors accessible from the STM32/PX4
| 커넥터 | 요약 | 사용처 |
|---|---|---|
| J4 | 추적/광류 이미지 센서 (CSI2) | Snapdragon - 리눅스 |
| J8 | USB 3.0 OTG | Snapdragon - 리눅스, adb |
| J10 | BLSP7 UART 및 I2C 오프보드 | Snapdragon - 리눅스 |
| J11 | BLSP12 UART 및 I2C 오프보드 | Snapdragon - 리눅스 |
| VOXL microSD | Snapdragon - 리눅스 | |
| PX4 microSD | 32Gb Max | STM32 - PX4 |
| Wi-Fi 안테나 | 포함됨. | Snapdragon - 리눅스 |
사용자 가이드
이 대상에 대한 PX4 빌드 방법 :
빌드 방법
To build PX4 for this target:
make modalai_fc-v1시리얼 포트 매핑
Note: mappings shown are for the PX4 controlled interfaces only
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J1012) |
| USART2 | /dev/ttyS1 | TELEM3 (J1002) |
| USART3 | /dev/ttyS2 | 디버그 콘솔(J1001) |
| UART4 | /dev/ttyS3 | 확장 UART (J6) |
| UART5 | /dev/ttyS4 | PX4와 보조 컴퓨터간의 UART |
| USART6 | /dev/ttyS5 | RC (J1004) |
| UART7 | /dev/ttyS6 | TELEM1 (J1010) |
| UART8 | /dev/ttyS7 | 해당 없음 |
지원
Please visit the ModalAI Forum for more information.