Orbit (Multicopter)

")
The Orbit guided flight mode allows you to command a multicopter (or VTOL in multicopter mode) to fly in a circle at a particular location, by default yawing so that it always faces towards the center.
INFO
- Mode is automatic - no user intervention is required to control the vehicle.
- Mode requires at least a valid local position estimate (does not require a global position).
- Flying vehicles can't switch to this mode without valid local position.
- Flying vehicles will failsafe if they lose the position estimate.
- Mode prevents arming (vehicle cannot be armed while this mode is selected).
- Mode requires wind and flight time are within allowed limits (specified via parameters).
- This mode is currently only supported on multicopter (or VTOL in MC mode).
- RC stick movement can control ascent/descent and orbit speed and direction.
- The mode can be triggered using the MAV_CMD_DO_ORBIT MAVLink command.
Overview

QGroundControl (or other compatible GCS or MAVLink API) is required to enable the mode, and to set the center position, initial radius and altitude of the orbit. Once enabled the vehicle will fly as fast as possible to the closest point on the commanded circle trajectory and do a slow (1m/s) clockwise orbit on the planned circle, facing the center.
Instructions for how to start an orbit can be found here: FlyView > Orbit Location (QGroundControl guide).
INFO
The use of an RC control is optional. If no RC control is present the orbit will proceed as described above. RC control cannot be used to start the mode (if you switch to the mode via RC it will sit idle).
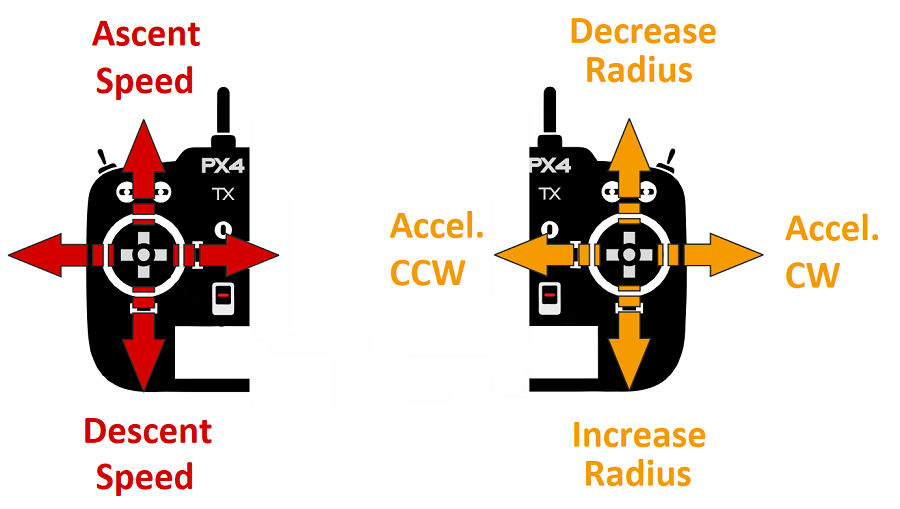
RC control can be used to change the orbit altitude, radius, speed, and orbit direction:
- Left stick:
- up/down: controls speed of ascent/descent, as in Position mode. When in center deadzone, altitude is locked.
- left/right: no effect.
- Right stick:
- left/right: controls acceleration of orbit in clockwise/counter-clockwise directions. When centered the current speed is locked.
- Maximum velocity is MPC_XY_VEL_MAX and further limited to keep the centripetal acceleration below 2m/s^2.
- up/down: controls orbit radius (smaller/bigger). When centered the current radius is locked.
- Minimum radius is 1m. Maximum radius is MC_ORBIT_RAD_MAX.
- left/right: controls acceleration of orbit in clockwise/counter-clockwise directions. When centered the current speed is locked.
The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
The mode can be stopped by switching to any other flight mode (using RC or QGC).
Parameters/Limits
The mode is affected by the following parameters:
| Parameter | Description |
|---|---|
| MC_ORBIT_RAD_MAX | Maximum radius of orbit. Default: 1000m. |
| MC_ORBIT_YAW_MOD | Yaw behaviour during orbit flight. Default: Front to Circle Center. |
| MPC_XY_VEL_MAX | Tangential speed limit. Stick input won't accelerate beyond this limit. Higher commands are accepted but capped. |
The following limits are hard coded:
- Initial/default rotation is 1m/s in a clockwise direction.
- The maximum acceleration is limited to 2m/s^2, with priority on keeping the commanded circle trajectory rather than commanded ground speed (i.e. the vehicle will slow down in order to achieve the correct circle if the acceleration exceeds 2m/s^2).
MAVLink Messages (Developers)
Orbit mode uses the following MAVLink commands:
- MAV_CMD_DO_ORBIT - Start an orbit with specified center point, radius, direction, altitude, speed and yaw direction. The same defaults and limits apply. When exceeding limits the command is accepted but velocity and radius capped.
- ORBIT_EXECUTION_STATUS - Orbit status emitted during orbit to update GCS of current orbit parameters (these may be changed by the RC controller).