E-flite Convergence Tiltrotor VTOL (Pixfalcon)
The E-Flite Convergence can easily be converted to a fully autonomous VTOL with PX4. There is not much space but it's enough for a Pixfalcon flight controller with GPS and telemetry.
INFO
The original Horizon Hobby E-Flite Convergence frame and Pixfalcon have been discontinued. Alternatives are provided in the Purchase section.
Where to Buy
Vehicle frame options:
- WL Tech XK X450 - AliExpress
- JJRC M02 - Banggood (AU), AliExpress
Flight controller options ():
- Pixhawk 4 Mini
- Holybro Pixhawk Mini.
- Any other compatible flight controller with small enough form-factor.
Hardware Setup
The vehicle needs 7 PWM signals for the motors and control surfaces:
- Motor (left/right/back)
- Tilt servos (right/left)
- Elevons (left/right)
These can be wired to flight controller outputs more-or-less in any way you want (though outputs for motors should be grouped together, and so on).
The outputs are configured in the Actuators Configuration by following the instructions for VTOL tiltrotor geometry and output configuration. Note that you will need to start from the Generic Tiltrotor VTOL frame.
Note that left and right in the configuration screen and frame reference are defined from the perspective of a human pilot inside a real plane (or looking from above, as shown below):

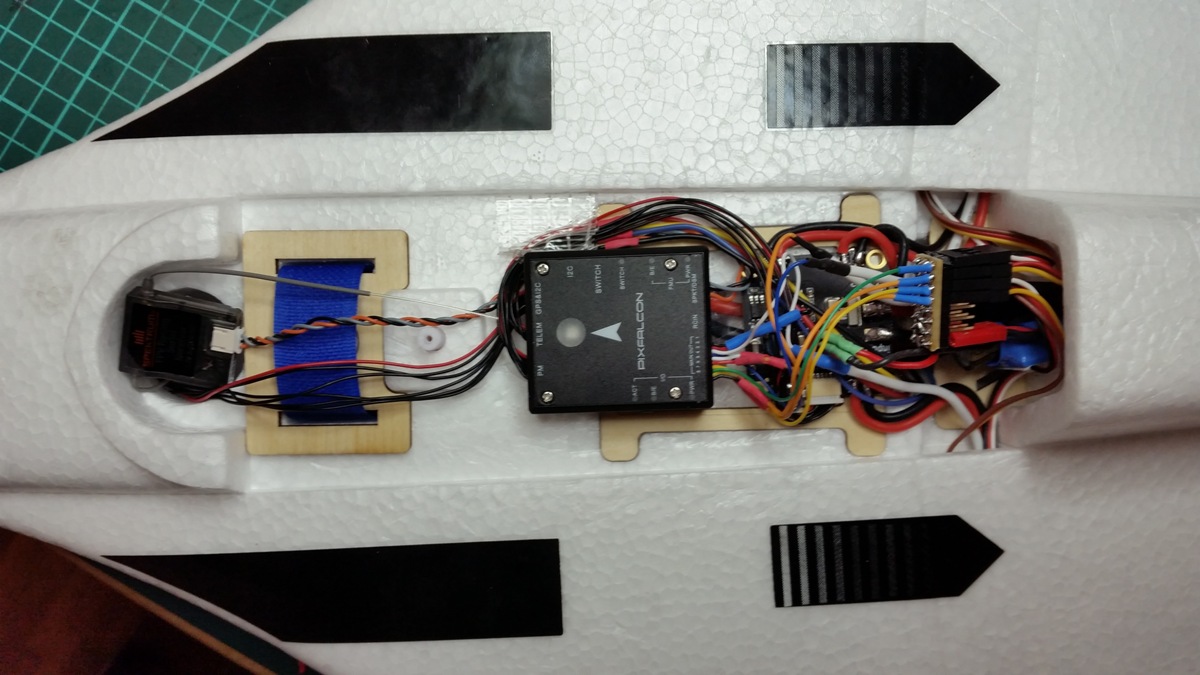
Flight Controller
The flight controller can be mounted at the same place the original autopilot was.
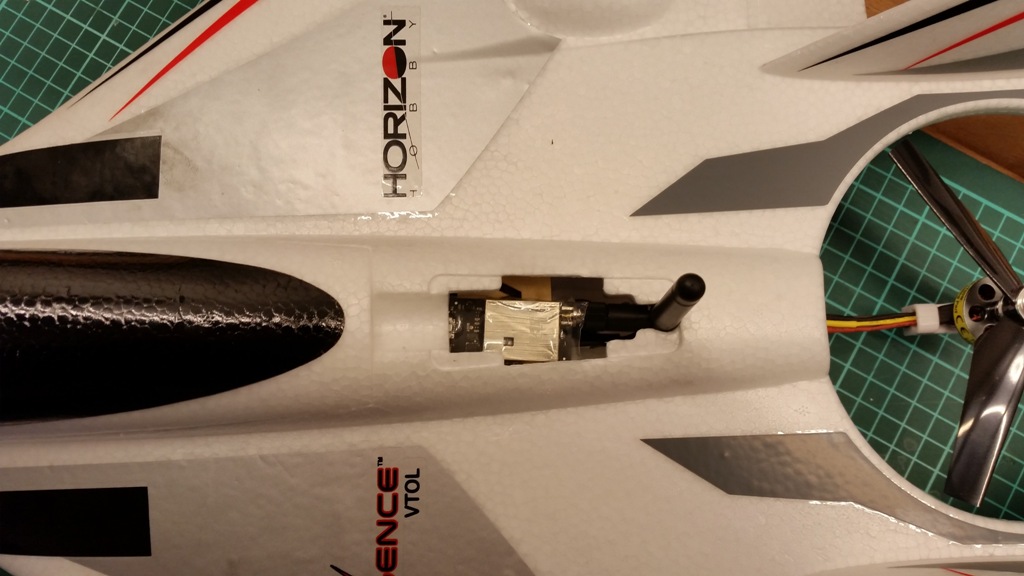
Telemetry Radio
The telemetry module fits into the bay meant to hold FPV transmission gear.
GPS
For the GPS we cut out a section of foam inside the "cockpit". That way the GPS can be put inside the body and is nicely stowed away without compromising the vehicle appearance.

PX4 Configuration
Follow the Standard Configuration in QGroundControl (radio, sensors, flight modes, etc.).
The particular settings that are relevant to this vehicle are:
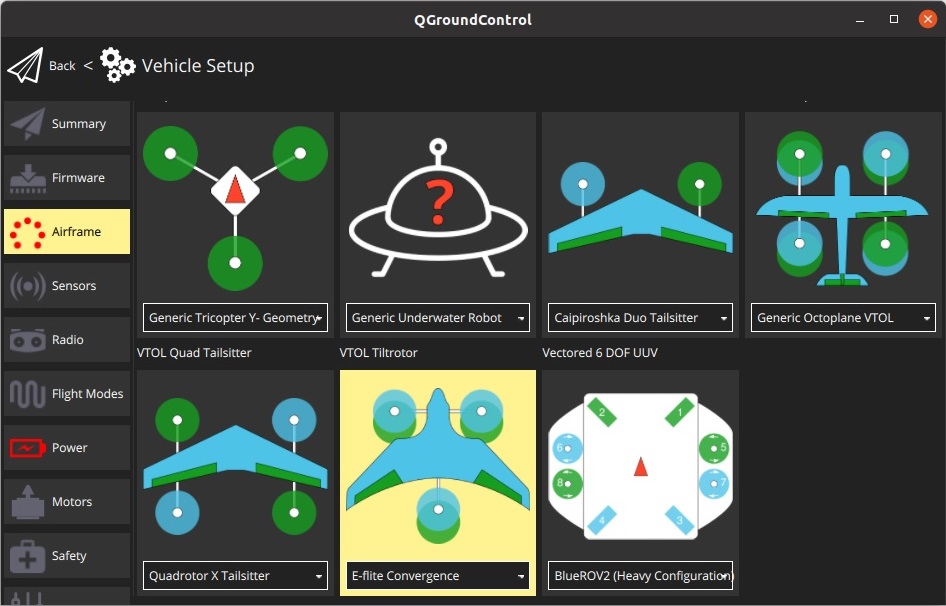
- Airframe
- Select the airframe configuration E-flite Convergence under VTOL Tiltrotor and restart QGroundControl.
- Select the airframe configuration E-flite Convergence under VTOL Tiltrotor and restart QGroundControl.
- Flight Modes/Switches
- As this is a VTOL vehicle, you must assign an RC controller switch for transitioning between multicopter and fixed-wing modes.