FunCub QuadPlane (Pixhawk)
The Fun Cub QuadPlane VTOL is a standard tailplane aircraft (the Multiplex FunCub) that has been retrofitted with a QuadCopter system.
Key information:
- Frame: Multiplex FunCub
- Flight controller: Pixhawk

Unmodified, the Fun Cub is a relatively affordable plane and relatively easy to fly. After the conversion the plane is significantly heavier and less aerodynamic. It still flies quite well but needs around 75% throttle in forward flight.
Bill of Materials
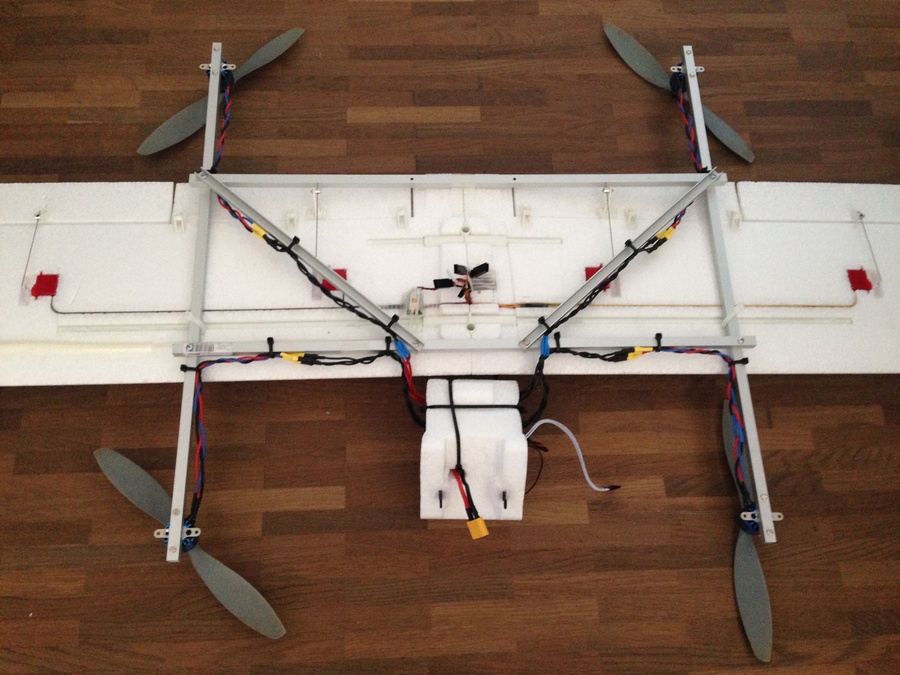
The actual plane looks roughly like as shown in the image above (other similar models will work just fine - this is a Multiplex Fun Cub).
The minimal equipment required is:
- Multiplex FunCub (or similar)
- Pixhawk or compatible
- Digital airspeed sensor
- 900 kV motors (e.g. Iris propulsion set - motors and ESC)
- 10" props for quad motors (10x45 or 10x47)
- 10" prop for fixed-wing motor (10×7)
- GPS module
- 4S battery
- Aluminum frame for mounting the quad motors (10x10mm square tube, 1mm wall thickness)
- TOW is ~2.3kg with a 4200mAh 4S battery
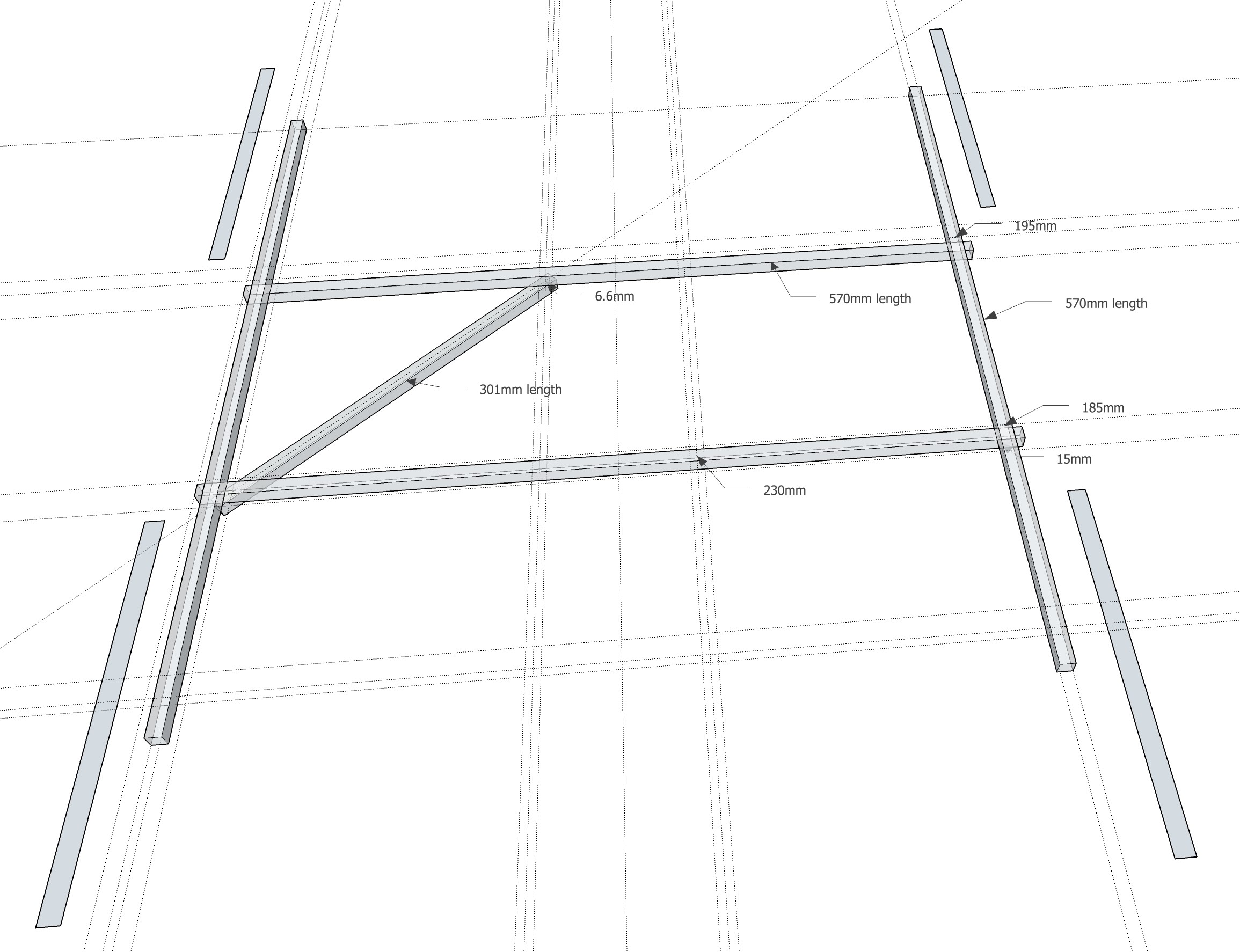
Structure
The structure is made out of aluminum booms as shown below.
Wiring
Motor and servo wiring is nearly entirely up to you, but should match the Generic Standard VTOL configuration, as shown in the airframe reference. The geometry and output assignment can be configured in the Actuators Configuration
For example, you might wire it up like this example (orientation as if "sitting in the plane"):
| Port | Connection |
|---|---|
| MAIN 1 | Front right motor (CCW) |
| MAIN 2 | Back left motor (CCW) |
| MAIN 3 | Front left motor (CW) |
| MAIN 4 | Back right motor (CW) |
| AUX 1 | Left aileron TODO |
| AUX 2 | Right aileron |
| AUX 3 | Elevator |
| AUX 4 | Rudder |
| AUX 5 | Throttle |
For further instructions on wiring and configurations please see: Standard VTOL Wiring and Configuration.
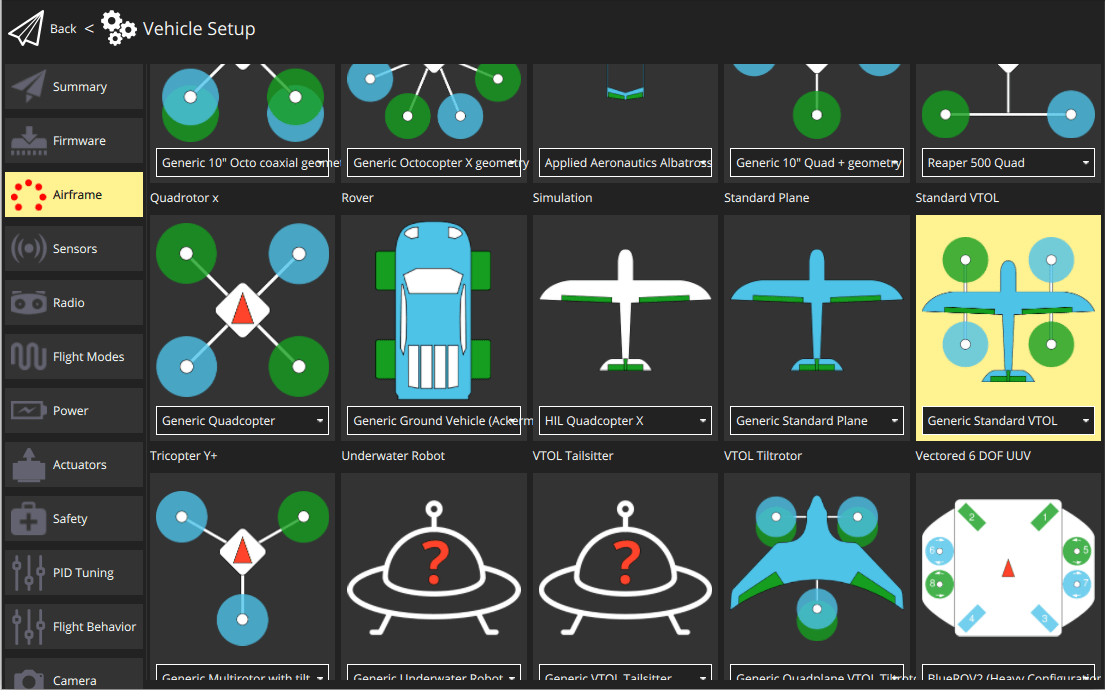
Airframe Configuration
For Airframe select the vehicle group/type as Standard VTOL and the specific vehicle as Generic Standard VTOL as shown below (do not forget to click Apply and Restart in the top).
Configure the outputs and geometry following the instructions in Actuators Configuration
The default parameters are often sufficient for stable flight. For more detailed tuning information see Standard VTOL Wiring and Configuration.
After you finish calibration the VTOL is ready to fly.