定高模式(多旋翼)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
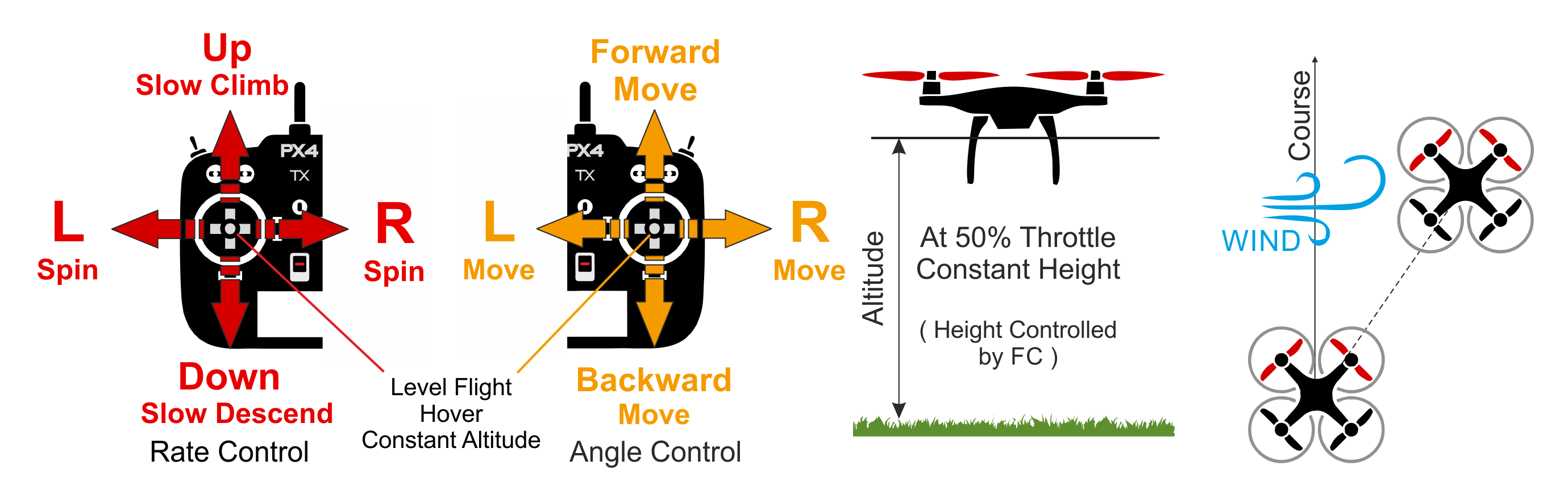
Altitude mode is a relatively easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current altitude. 如果在水平面上运动,飞机将继持续运动直到任何动量被风阻力消散。 如果刮风,飞机会向风的方向漂移。
TIP
Altitude mode is the safest non-GPS manual mode for new fliers. It is just like Stabilized mode but additionally locks the vehicle altitude when the sticks are released.
The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
技术总结
RC/manual mode like Stabilized mode but with altitude stabilization (centred sticks level vehicle and hold it to fixed altitude). The horizontal position of the vehicle can move due to wind (or pre-existing momentum).
- Centered sticks:
- RPY摇杆使飞机水平。
- 油门(~50%)抗风保持当前姿态。
- 外部中心:
- 翻滚/俯仰摇杆控制各自方向的倾斜角,导致左右和前后的移动。
- 油门摇杆以预定的最大速率(和其他轴上的移动速度)控制上升速度。
- 偏航摇杆控制水平面上方的角度旋转速率。
- 起飞:
- 降落时,如果将油门杆抬高至 62.5%(从油门杆最低开始的整个范围),无人机将起飞。
- Altitude is normally measured using a barometer, which may become inaccurate in extreme weather conditions. 带有激光雷达/距离传感器的飞机将能够以更高的可靠性和准确性控制高度。
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch: Assistance from autopilot to stabilize the attitude. Position of RC stick maps to the orientation of vehicle.
- Throttle: Assistance from autopilot to hold position against wind.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
参数
该模式受以下参数影响:
| 参数 | 描述 |
|---|---|
| MPC_Z_VEL_MAX_UP | 最大垂直上升速度。 默认:3m/s。 |
| MPC_Z_VEL_MAX_DN | 最大垂直下降速度。 默认:1m/s。 |
MPC_XXXX | 大多数 MPC_xxx参数会影响此模式下的飞行行为(至少在某种程度上)。 For example, MPC_THR_HOVER defines the thrust at which a vehicle will hover. |