手动/自稳模式(多旋翼)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "需要手动/遥控器控制")
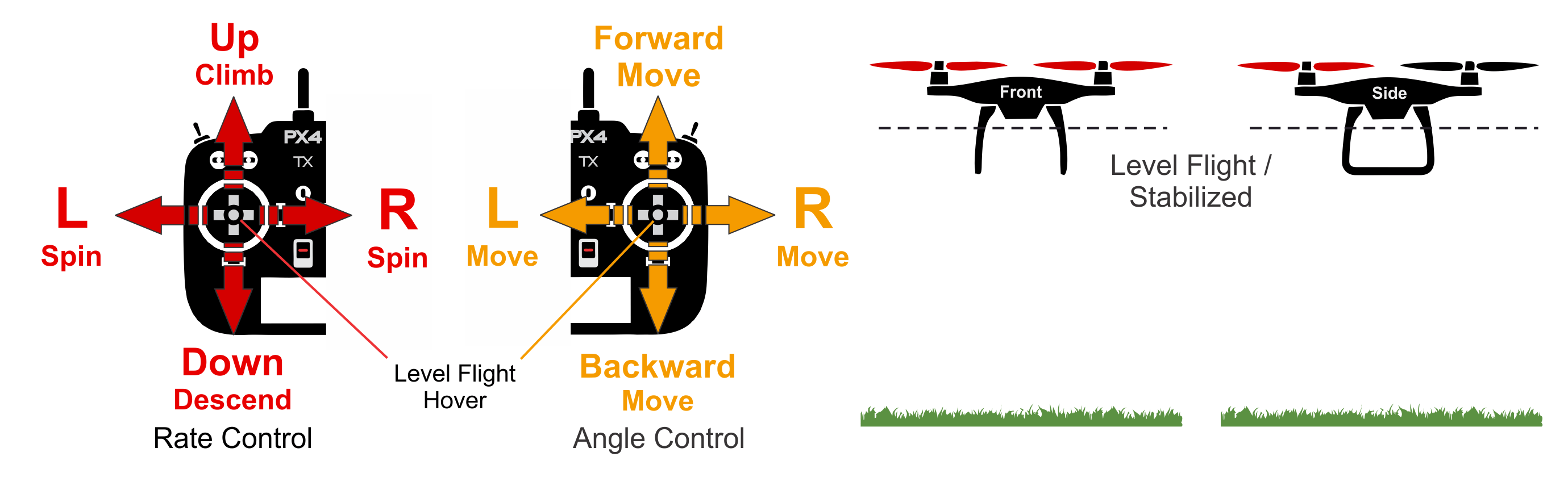
_手动/自稳_模式当遥控杆居中时多旋翼无人机将自稳。 要手动使机体移动/飞行您需要移动遥杆使其偏离居中位置。
:::note 如果您设置_手动_或者_自稳_模式,则启用这个多旋翼模式。 :::
在手动控制下横滚和俯仰摇杆控制机体围绕各个轴的_角度_,偏航摇杆控制水平面上方的旋转速度,油门控制高度/速度。
一旦释放摇杆,它们将会返回中心停顿区。 一旦横滚和俯仰摇杆居中,多旋翼无人机将平稳并停止运动。 然后机体将悬停在适当的位置/保持高度 - 前提是平衡得当,油门设置适当(在下方查看),并且没有施加任何外力(例如风)。 飞行器将朝着任何风的方向漂移,您必须控制油门以保持高度。
技术描述
RC mode where centered sticks level vehicle (only - position is not stabilized).
飞手的输入通过横滚和俯仰角度以及偏航角速率指令传递给自驾仪。 油门被重新定位(见下面的 ),并直接传递到控制分配。 自动驾驶仪控制着飞机的姿态角,这意味着当 RC 摇杆居中时自驾仪调整飞机的滚转和俯仰角为零(从而实现飞机姿态的改平)。 自动驾驶仪不能补偿由于风(或其他来源)引起的漂移。
- Centered sticks (inside deadband):
- Roll/Pitch sticks level vehicle.
- Outside center:
- Roll/Pitch sticks control tilt angle in those orientations, resulting in corresponding left-right and forward-back movement.
- Throttle stick controls up/down speed (and movement speed in other axes).
- Yaw stick controls rate of angular rotation above the horizontal plane.
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch: Assistance from autopilot to stabilize the attitude. Position of RC stick maps to the orientation of vehicle.
- Throttle: Manual control via RC sticks. RC input is sent directly to control allocation.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
参数
| 参数 | 描述 |
|---|---|
| MPC_THR_HOVER | 当油门杆居中输出的悬停油门,默认值为MPC_THR_CURVE。 |
| MPC_THR_CURVE | 定义油门缩放比例。 默认情况下被设置为重新调节比例到悬停油门位置,这意味着当油门杆居中时,输出配置的悬停油门( MPC_THR_HOVER),并且会重新线性调整低于和高于此值(允许在自稳模式和高度/位置控制模式之间平滑过渡)的摇杆输入。 在动力很强的机体上,悬停油门可能非常低(例如低于 20%),因此重新调整会使油门输入变形 - 对应上面举例, 80% 的推力将仅由摇杆输入的中位以上部分控制,20% 的推力由中位以下的部分来控制。 If needed MPC_THR_CURVE can be set to No Rescale so that there is no rescaling (stick input to throttle mapping is independent of MPC_THR_HOVER). |