수동/안정화 모드 (멀티콥터)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "수동/원격 제어 필요")
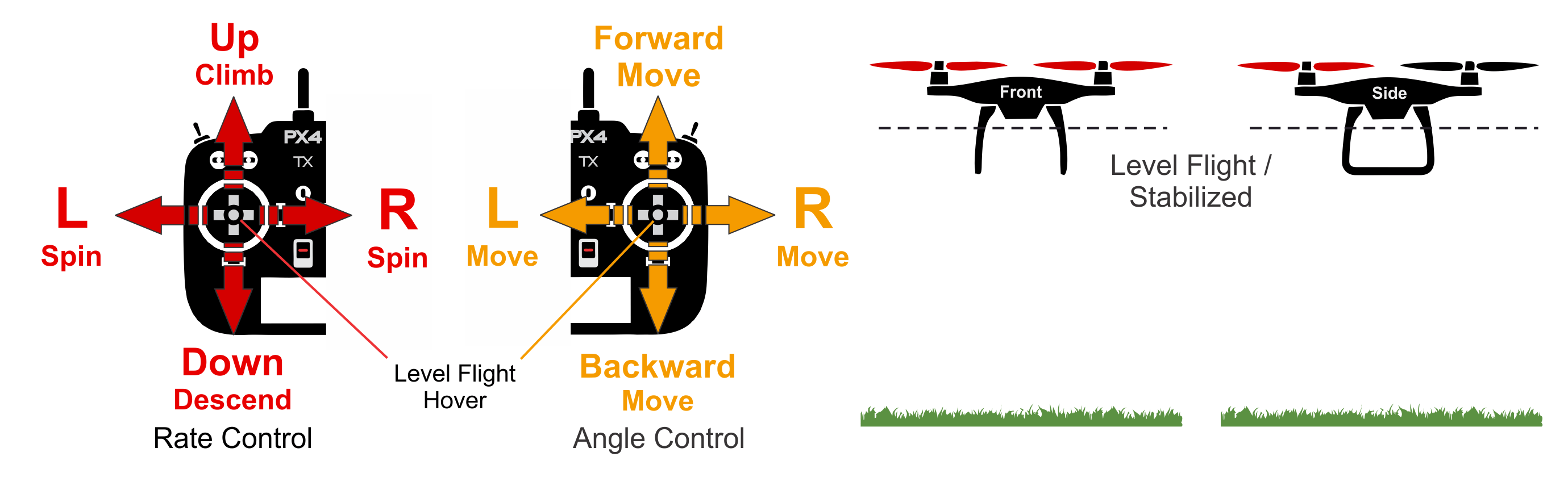
The Manual/Stabilized mode stabilizes the multicopter when the RC control sticks are centred. 기체를 수동으로 움직이거나 조종하려면 스틱을 중앙의 바깥쪽으로 제어합니다.
INFO
This multicopter mode is enabled if you set either Manual or Stabilized modes.
When under manual control the roll and pitch sticks control the angle of the vehicle (attitude) around the respective axes, the yaw stick controls the rate of rotation above the horizontal plane, and the throttle controls altitude/speed.
조종 스틱을 놓으면 중앙 데드 존으로 돌아갑니다. 롤 포크와 피치 스틱이 중앙에 오면 멀티 피터가 수평을 유지하고 정지합니다. 기체는 적절하게 균형을 잡고, 스로틀이 적절하게 설정되고(아래 참고), 외력이 가해지지 않으면 (예 : 바람), 고도에 유지되거나 유지됩니다. 기체는는 바람 방향으로 표류하게 되며, 고도를 유지하기 위해서는 스로틀을 제어하여야 합니다.
기술적 설명
RC mode where centered sticks level vehicle (only - position is not stabilized).
조종사의 입력은 롤 및 피치 각 명령과 요 율 명령으로 전달됩니다. Throttle is rescaled (see below) and passed directly to control allocation. 자동 조종 장치는 자세를 제어합니다. 즉, RC 스틱이 컨트롤러 데드 존 내부에 집중 될 때 롤과 피치 각을 제로로 조절합니다 (결과적으로 태도가 수평이 됨). 자동 조종 장치는 바람 (또는 다른 원인)으로 인한 드리프트를 보상하지 않습니다.
- Centered sticks (inside deadband):
- Roll/Pitch sticks level vehicle.
- Outside center:
- Roll/Pitch sticks control tilt angle in those orientations, resulting in corresponding left-right and forward-back movement.
- Throttle stick controls up/down speed (and movement speed in other axes).
- Yaw stick controls rate of angular rotation above the horizontal plane.
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch: Assistance from autopilot to stabilize the attitude. Position of RC stick maps to the orientation of vehicle.
- Throttle: Manual control via RC sticks. RC input is sent directly to control allocation.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
매개 변수
| 매개 변수 | 설명 |
|---|---|
| MPC_THR_HOVER | 스로틀 스틱이 중앙에 있고 MPC_THR_CURVE가 기본값으로 설정되어있을 때 출력되는 호버 스로틀입니다. |
| MPC_THR_CURVE | 스로틀 스케일링을 정의합니다. 기본적으로이 값은 호버 추력으로 조정으로 설정되어 있습니다. 즉, 스로틀 스틱이 중앙에있을 때 구성된 호버 스로틀이 출력되고 (MPC_THR_HOVER) 스틱 입력이 선형으로 조정됩니다. 강력한 기체의 경우 호버 스로틀이 매우 낮아 (예 : 20 % 미만) 스로틀 입력이 왜곡 될 수 있습니다. 즉, 여기서 추력의 80 %는 스틱 입력의 상단 절반으로, 하단은 20 %로 제어됩니다. 필요한 경우 MPC_THR_CURVE를 No Rescale로 설정하여 배율을 다시 조정할 수 없습니다 (스로틀 매핑에 대한 스틱 입력은 MPC_THR_HOVER과 무관 함). |