AUAV-X2 自动驾驶仪 (停产)
DiscontinuedWARNING
This flight controller has been discontinued and is no longer commercially available.
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
The AUAV® AUAV-X2 autopilot is based on the Pixhawk®-project FMUv2 open hardware design. It runs PX4 on the NuttX OS.

总览
- 主片上系统:STM32F427
- CPU:STM32F427VIT6 ARM 微控制器-版本 3
- IO:STM32F100C8T6 ARM 微控制器
- 传感器:
- Invensense MPU9250 9DOF
- Invensense ICM-20608 6DOF
- MEAS MS5611 气压计
- 尺寸/重量
- 尺寸:36mm x 50mm
- 安装点:30.5mm x 30.5mm 直径 3.2mm
- 重量: 10.9g
- 具有反向电压保护的电源 OR-ing 原理图。 需要 5V 电源模块!
连接
- 2.54 毫米头:
- GPS (USART4)
- I2C
- 遥控输入
- PPM 输入
- Spektrum 输入
- RSSI 输入
- sBus 输入
- sBus 输出
- 电源输入
- 蜂鸣器输出
- LED 输出
- 8路伺服输出
- 6路辅助输出
- USART7(控制台)
- USART8(OSD)
访问链接
No longer in production. This has been superseded by the mRo X2.1. mRobotics is the distributor for the AUAV Products from August 2017.
主链接
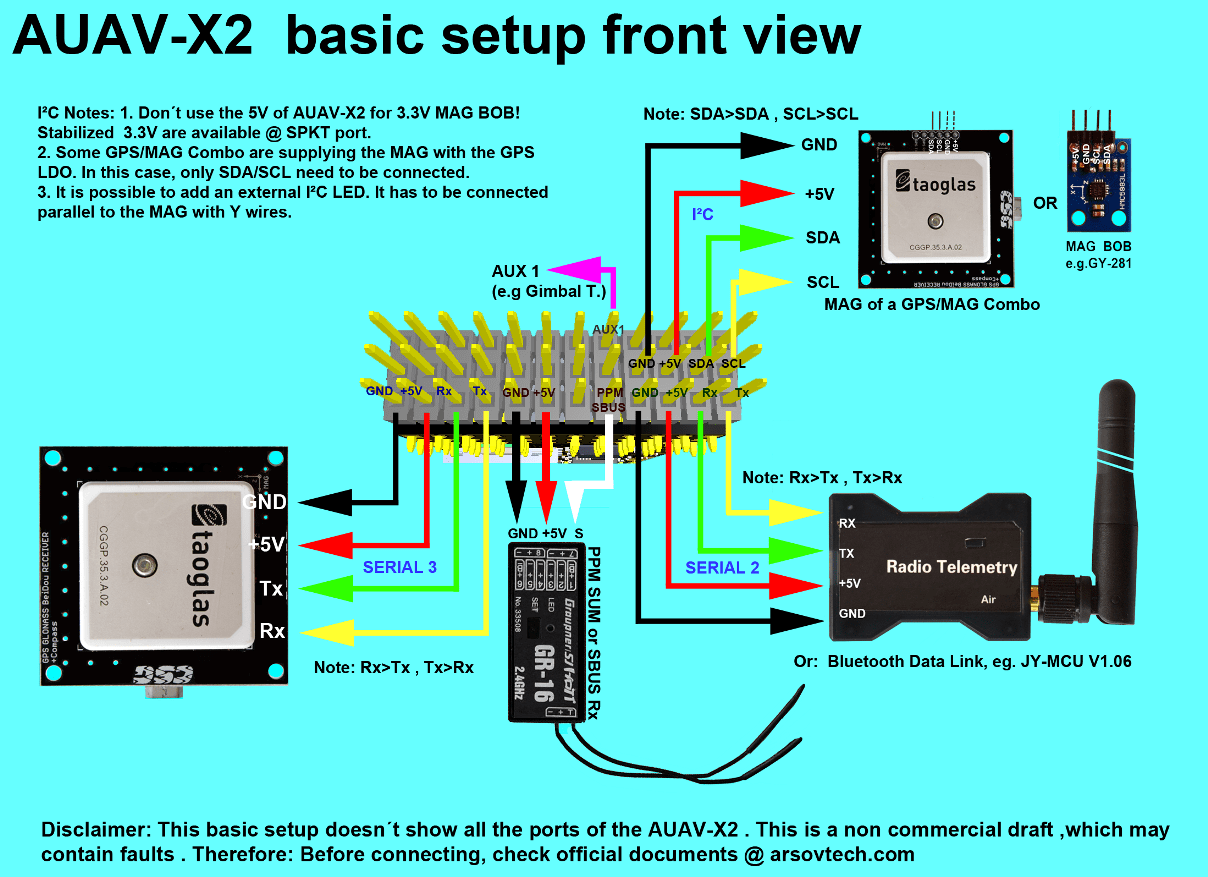
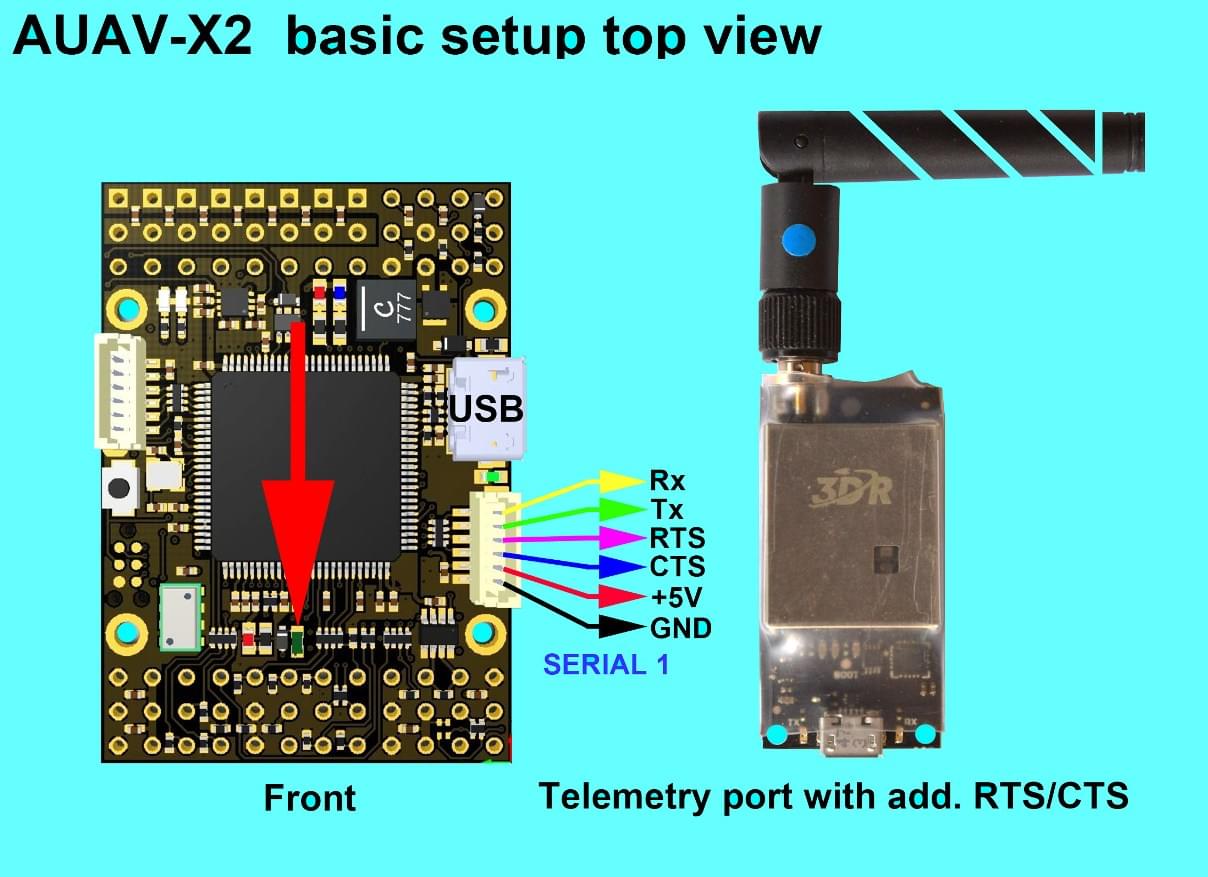
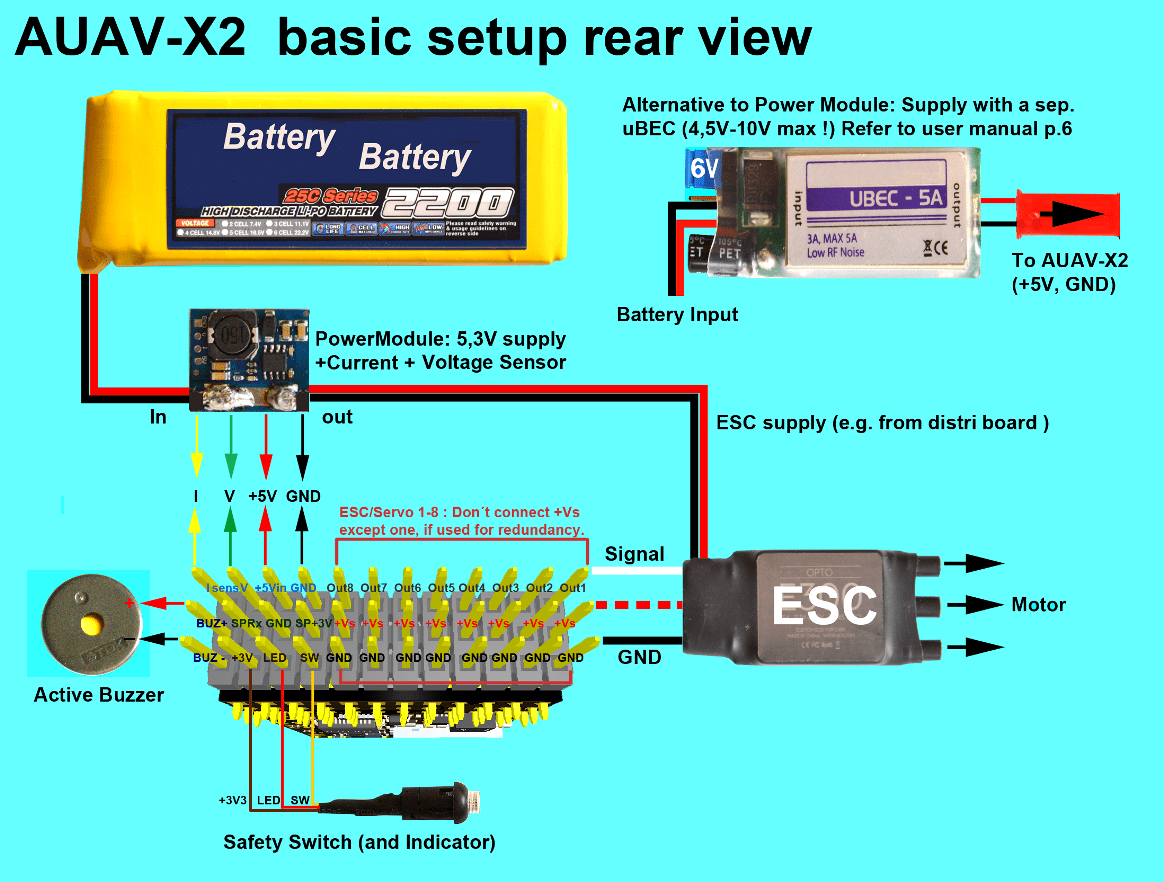
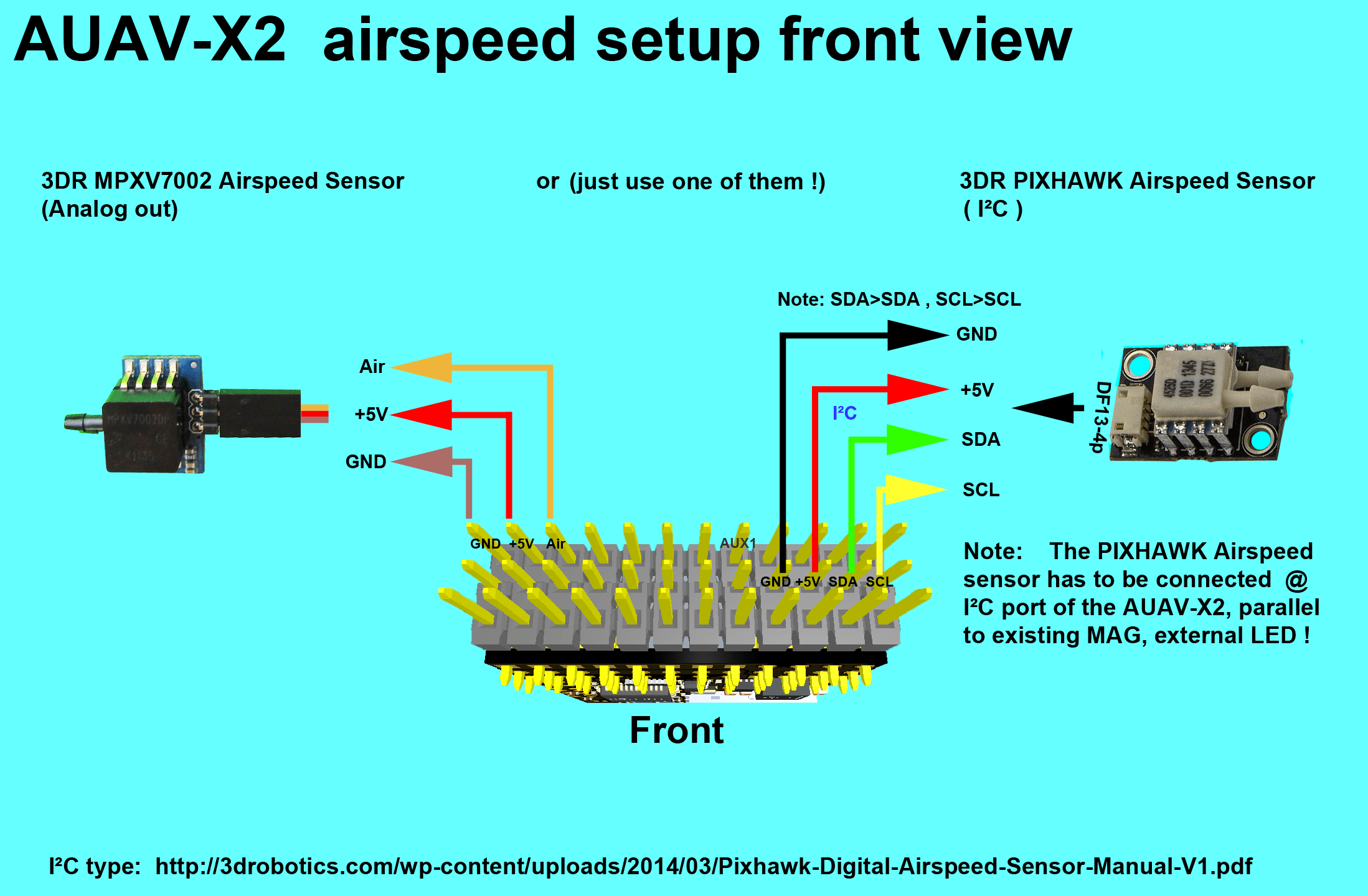
接线指南
原理图
The board is based on the Pixhawk project FMUv2 open hardware design.
- FMUv2 + IOv2 schematic - 原理图和布局
As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are available.
Serial Port Mapping
| UART | 设备 | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |