定高模式(多旋翼)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "需要手动/遥控器控制")
")
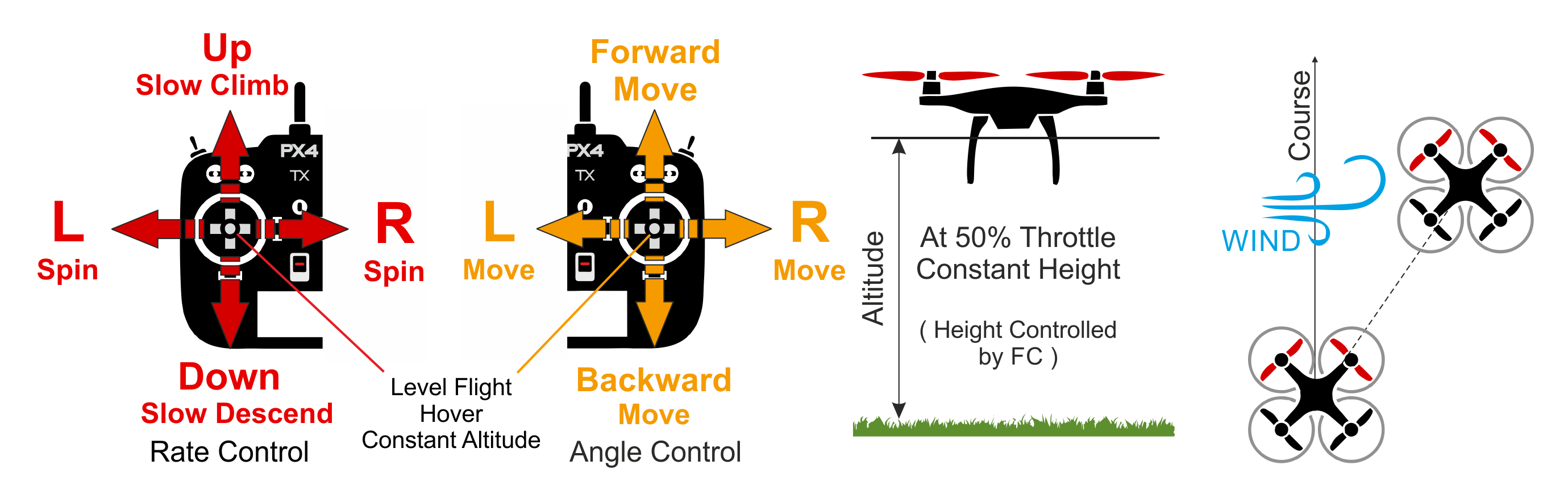
_高度模式_是一个_相对_容易的遥控模式,其中滚转和俯仰控制机体在左右和前后方向上的运动(相对于机体“前方”),偏航摇杆控制水平面上的旋转速度,油门控制升降速度。
当摇杆被释放/回中时,机体将恢复水平和保持当前的_高度_。 如果在水平面上运动,飞机将继持续运动直到任何动量被风阻力消散。 如果刮风,飞机会向风的方向漂移。
TIP
高度模式 是新飞手最安全的非GPS 手动模式。 就像手动/自稳模式,但是在松开摇杆时也可以锁定机体高度。
下图直观的显示了模式行为(对于一个模式 2 发送器)。
技术摘要
遥控/手动模式就像 手动/自稳(多旋翼)模式,但具有_高度稳定_ (摇杆中位能够使无人机水平并且保持固定高度)。 The horizontal position of the vehicle can move due to wind (or pre-existing momentum).
- 回正摇杆(内带死区):
- RPY摇杆使飞机水平。
- 油门(~50%)抗风保持当前姿态。
- 外部中心:
- 翻滚/俯仰摇杆控制各自方向的倾斜角,导致左右和前后的移动。
- 油门摇杆以预定的最大速率(和其他轴上的移动速度)控制上升速度。
- 偏航摇杆控制水平面上方的角度旋转速率。
- 起飞:
- 降落时,如果将油门杆抬高至 62.5%(从油门杆最低开始的整个范围),无人机将起飞。
- Altitude is normally measured using a barometer, which may become inaccurate in extreme weather conditions. 带有激光雷达/距离传感器的飞机将能够以更高的可靠性和准确性控制高度。
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch: Assistance from autopilot to stabilize the attitude. Position of RC stick maps to the orientation of vehicle.
- Throttle: Assistance from autopilot to hold position against wind.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
参数
该模式受以下参数影响:
| 参数 | 描述 |
|---|---|
| MPC_Z_VEL_MAX_UP | 最大垂直上升速度。 默认:3m/s。 |
| MPC_Z_VEL_MAX_DN | 最大垂直下降速度。 默认:1m/s。 |
RCX_DZ | 通道 X 的遥控死区。 油门的 X 值取决于 RC_MAP_THROTTLE 的值。 例如,如果油门是通道4,则 RC4_DZ 指定死区。 |
MPC_XXXX | 大多数 MPC_xxx参数会影响此模式下的飞行行为(至少在某种程度上)。 例如,MPC_THR_HOVER定义飞机悬停时的推力。 |