Автопілот AUAV-X2 (припинено)
DiscontinuedWARNING
Цей політний контролер був знятий з виробництва і більше не продається комерційно.
PX4 не виробляє цей (або будь-який) автопілот. Зверніться до виробника щодо питань технічної підтримки або відповідності вимогам.
Автопілот AUAV® AUAV-X2 базується на відкритому апаратному дизайні Pixhawk®-project FMUv2. Він виконує PX4 на ОС NuttX.

Короткий опис
- Основна System-on-Chip: STM32F427
- Процесор: мікроконтролер ARM STM32F427VIT6 - Ревізія 3
- ІО: мікроконтролер ARM STM32F100C8T6
- Датчики:
- Invensense MPU9250 9DOF
- Invensense ICM-20608 6DOF
- MEAS MS5611 барометр
- Розміри/Вага
- Розмір: 36мм х 50мм
- Точки кріплення: 30,5 мм х 30,5 мм діаметр 3,2 мм
- Вага: 10.9g
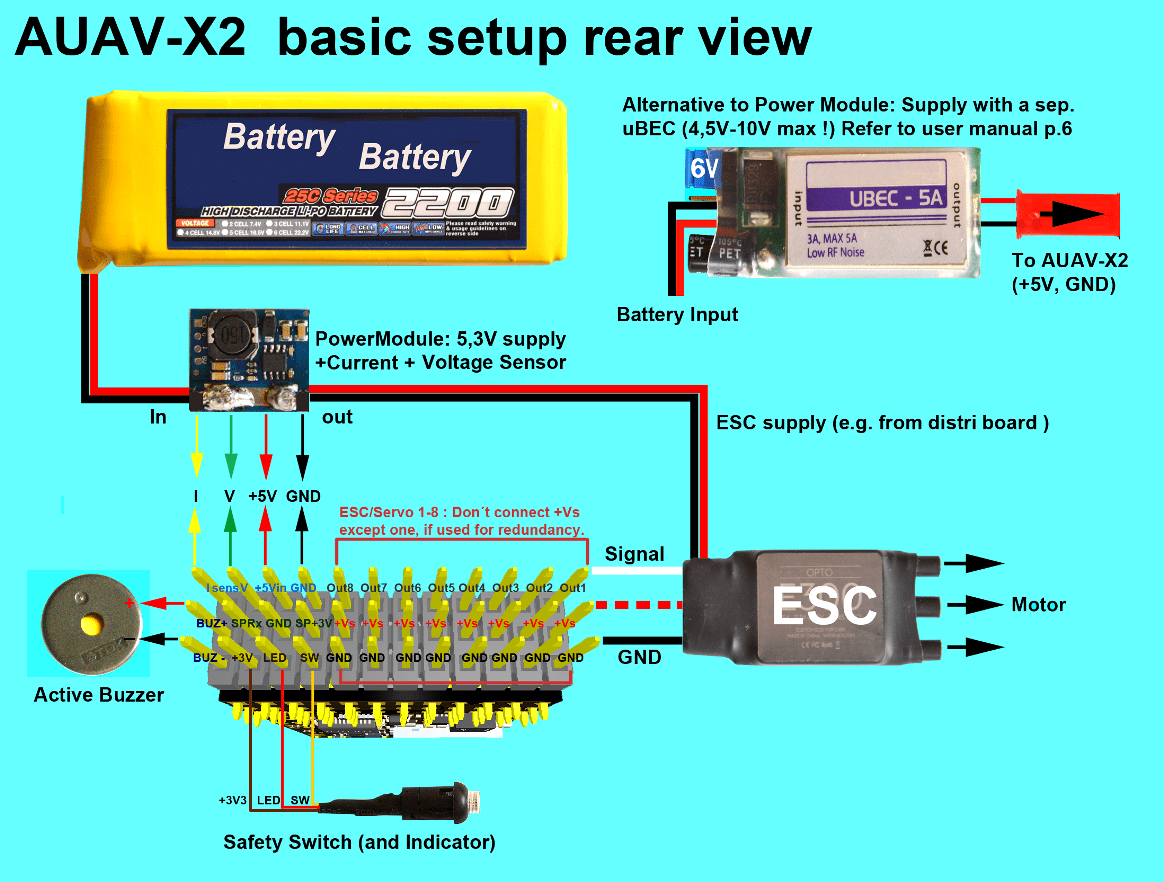
- Схема Power OR-ing з оберненою захистом від зворотної напруги. Необхідний модуль живлення 5V!
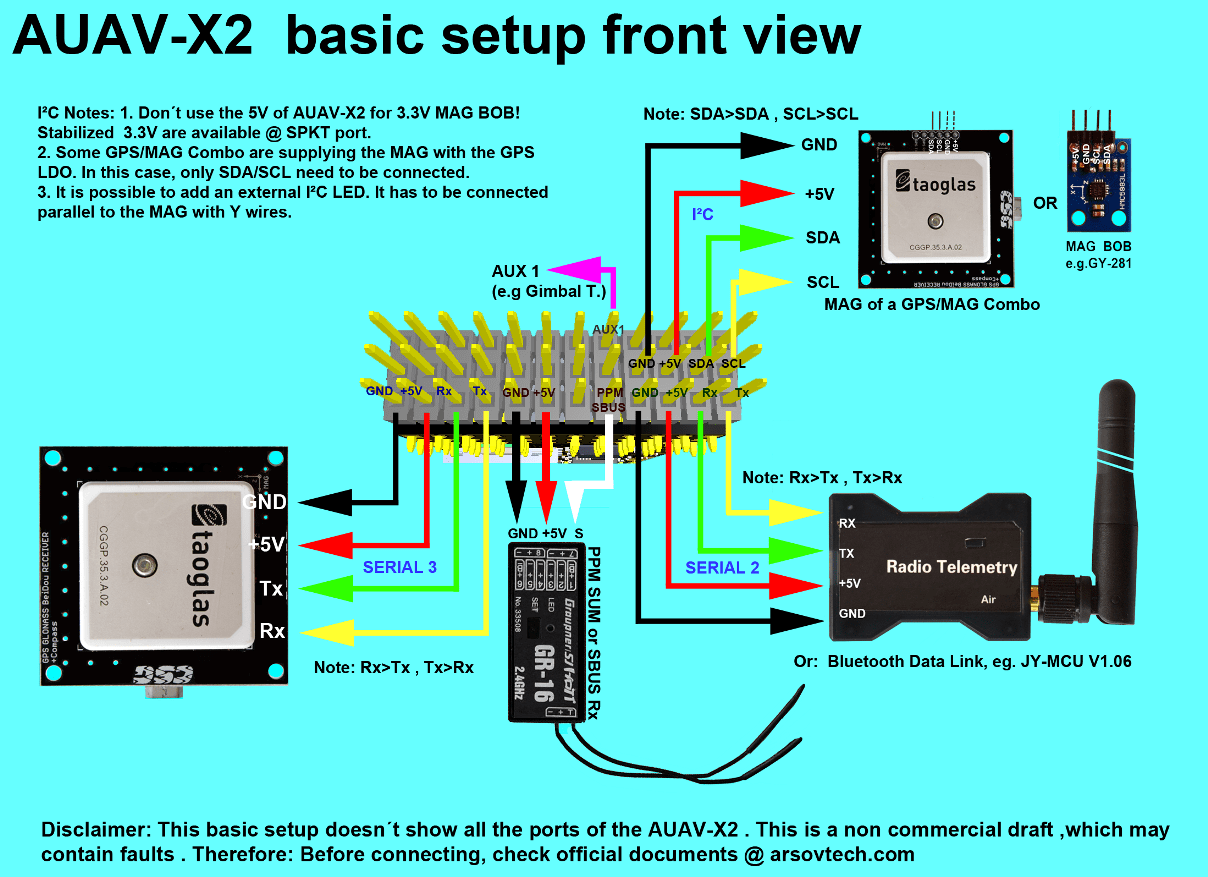
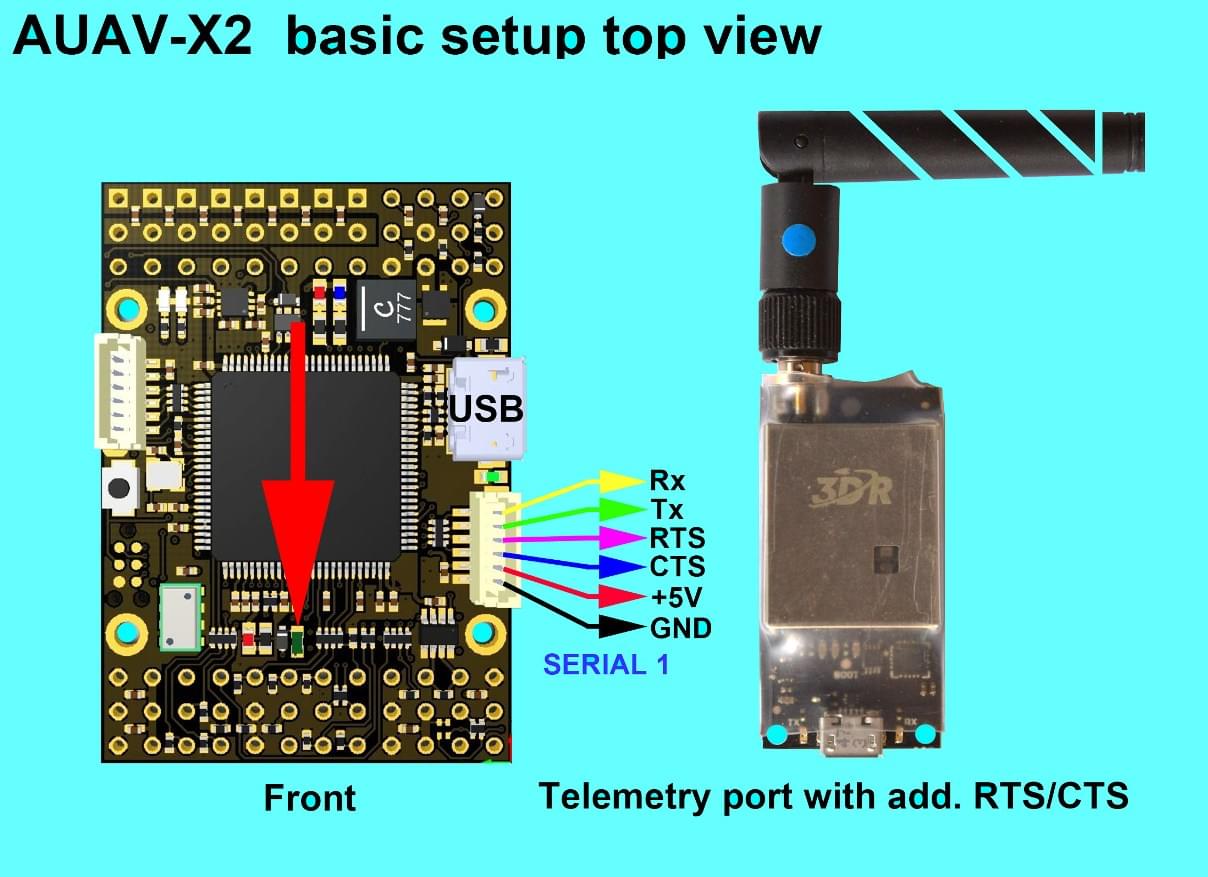
Підключення
- 2.54 мм заголовки:
- GPS (USART4)
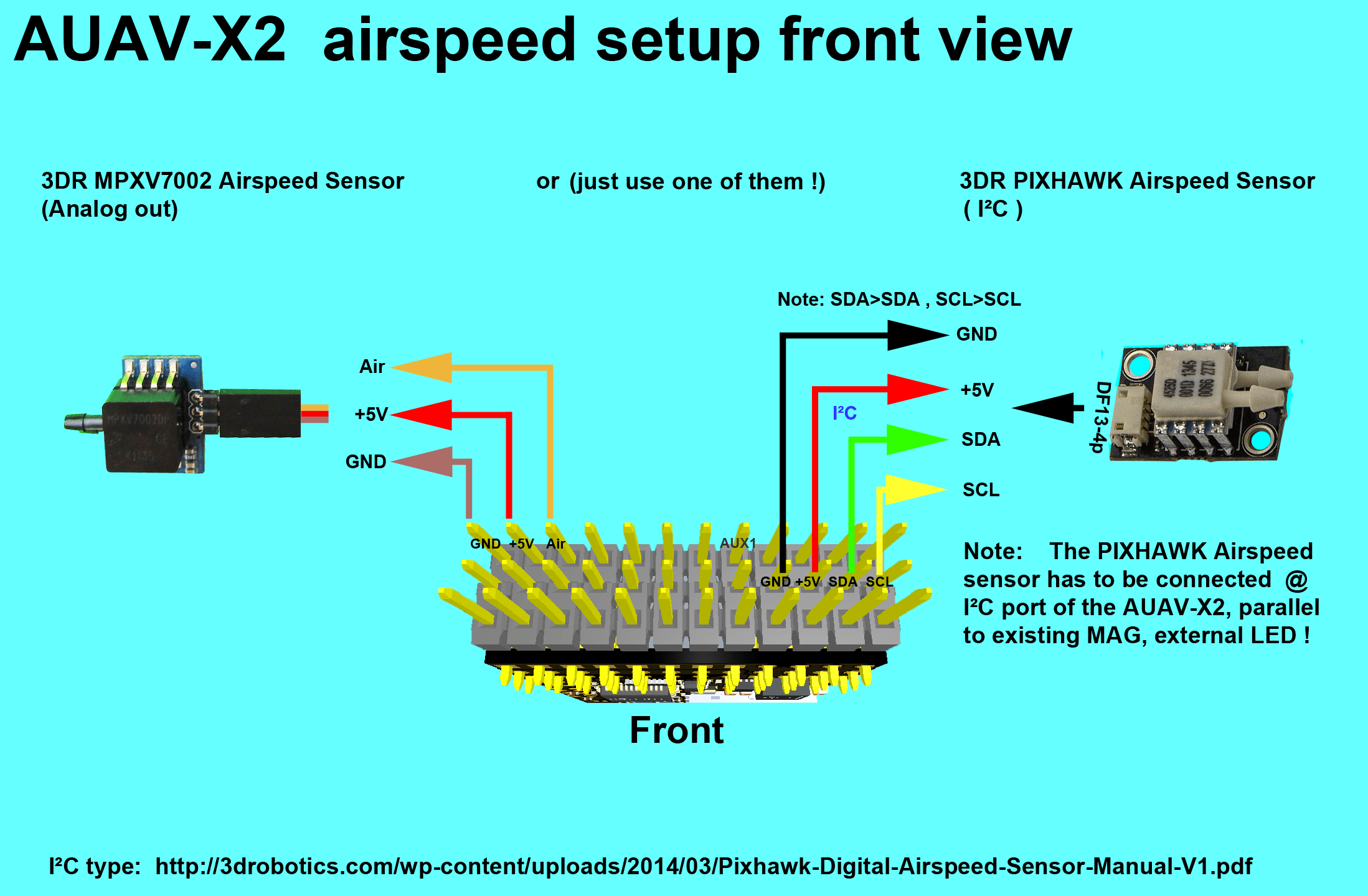
- i2c
- Вхід RC
- PPM вхід
- Вхідний спектр
- RSSI вхід
- вхід SBUS
- sBus вихід
- Вхід живлення
- Вихід зумера
- Вихід світлодіода
- 8 x Виводи сервоприводів
- 6 x Aux outputs
- USART7 (Консоль)
- USART8 (OSD)
Доступність
Більше не у виробництві. Це було замінено mRo X2.1. mRobotics є дистриб'ютором продукції AUAV з серпня 2017 року.
Ключові посилання
Посібник з підключення
Креслення
Плата базується на проекті Pixhawk відкритого апаратного забезпечення FMUv2.
- Схема FMUv2 + IOv2 -- Схема та макет
Як дизайн Open Hardware з ліцензією CC-BY-SA 3.0, всі схеми та файли дизайну доступні тут.
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |