AUAV-X2 자동조종장치 (단종됨)
DiscontinuedWARNING
This flight controller has been discontinued and is no longer commercially available.
PX4 does not manufacture this (or any) autopilot. PX4는 NuttX OS에서 실행됩니다.
The AUAV® AUAV-X2 autopilot is based on the Pixhawk®-project FMUv2 open hardware design. It runs PX4 on the NuttX OS.

요약
- 메인 시스템 온칩: STM32F427
- CPU : STM32F427VIT6 ARM 마이크로 컨트롤러 - 개정판 3
- IO: STM32F100C8T6 ARM 마이크로 컨트롤러
- 센서:
- 인벤센스 MPU9250 9DOF
- 인벤센스 ICM-20608 6DOF
- MEAS MS5611 기압계
- 크기/중량
- 크기: 36mm x 50mm
- 장착 위치: 직경 30.5mm x 30.5mm 3.2mm
- 중량: 10.9g
- 역전압 보호 기능의 전원 OR-ing 회로도. 5V 전원 모듈이 필요합니다.
연결성
- 2.54mm 헤더 :
- GPS (USART4)
- i2c
- RC 입력
- PPM 입력
- Spektrum 입력
- RSSI 입력
- sBus 입력
- sBus 출력
- 전원 입력
- 부저 출력
- LED 출력
- Servo 출력 8개
- Aux 출력 6개
- USART7 (콘솔)
- USART8 (OSD)
구매처
No longer in production. This has been superseded by the mRo X2.1. mRobotics is the distributor for the AUAV Products from August 2017.
주요 링크
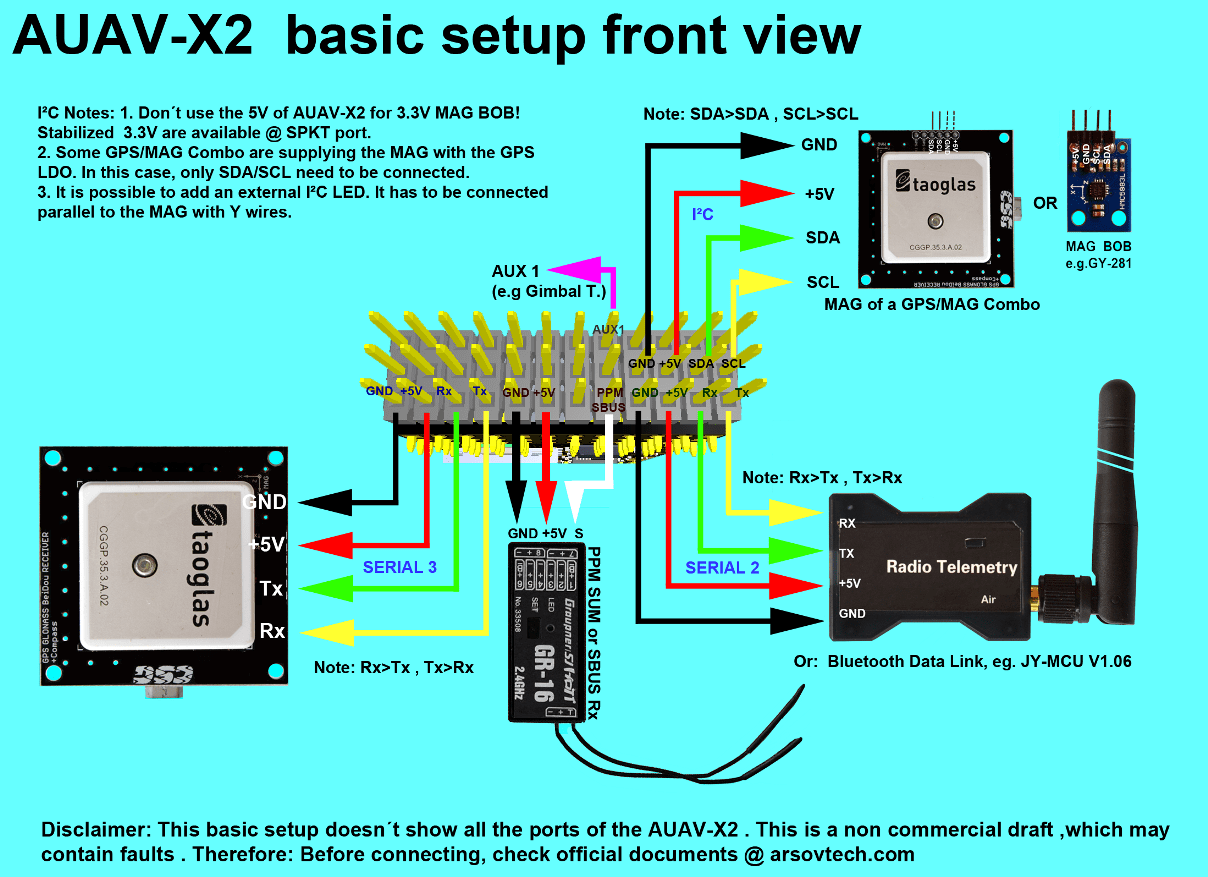
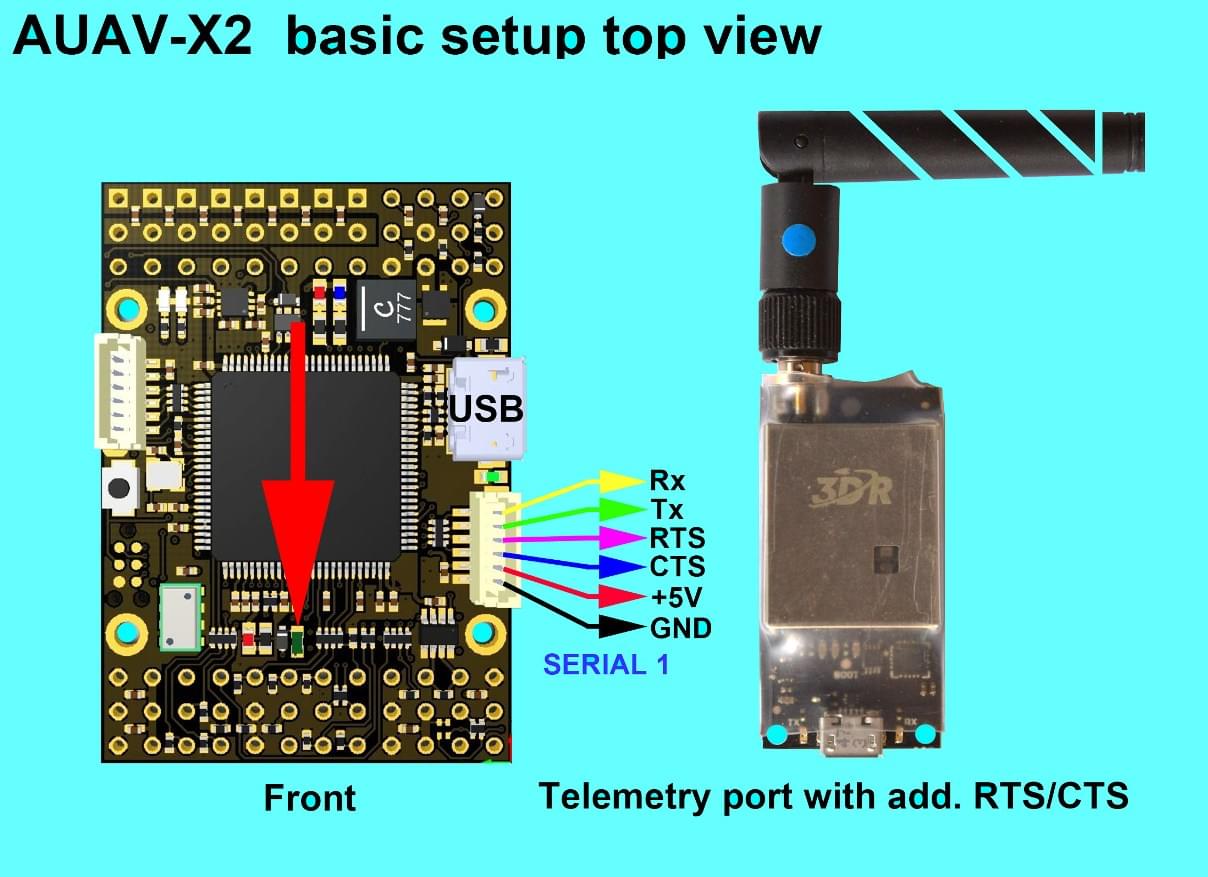
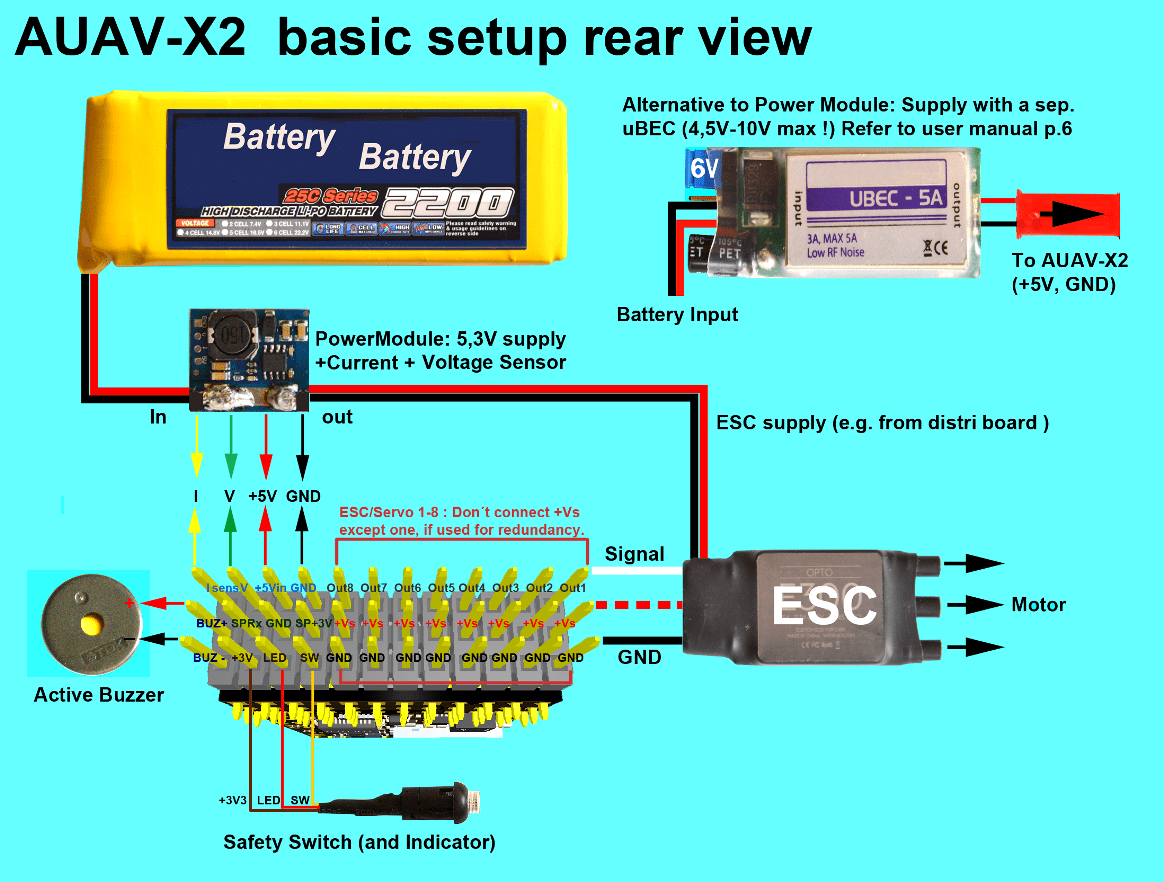
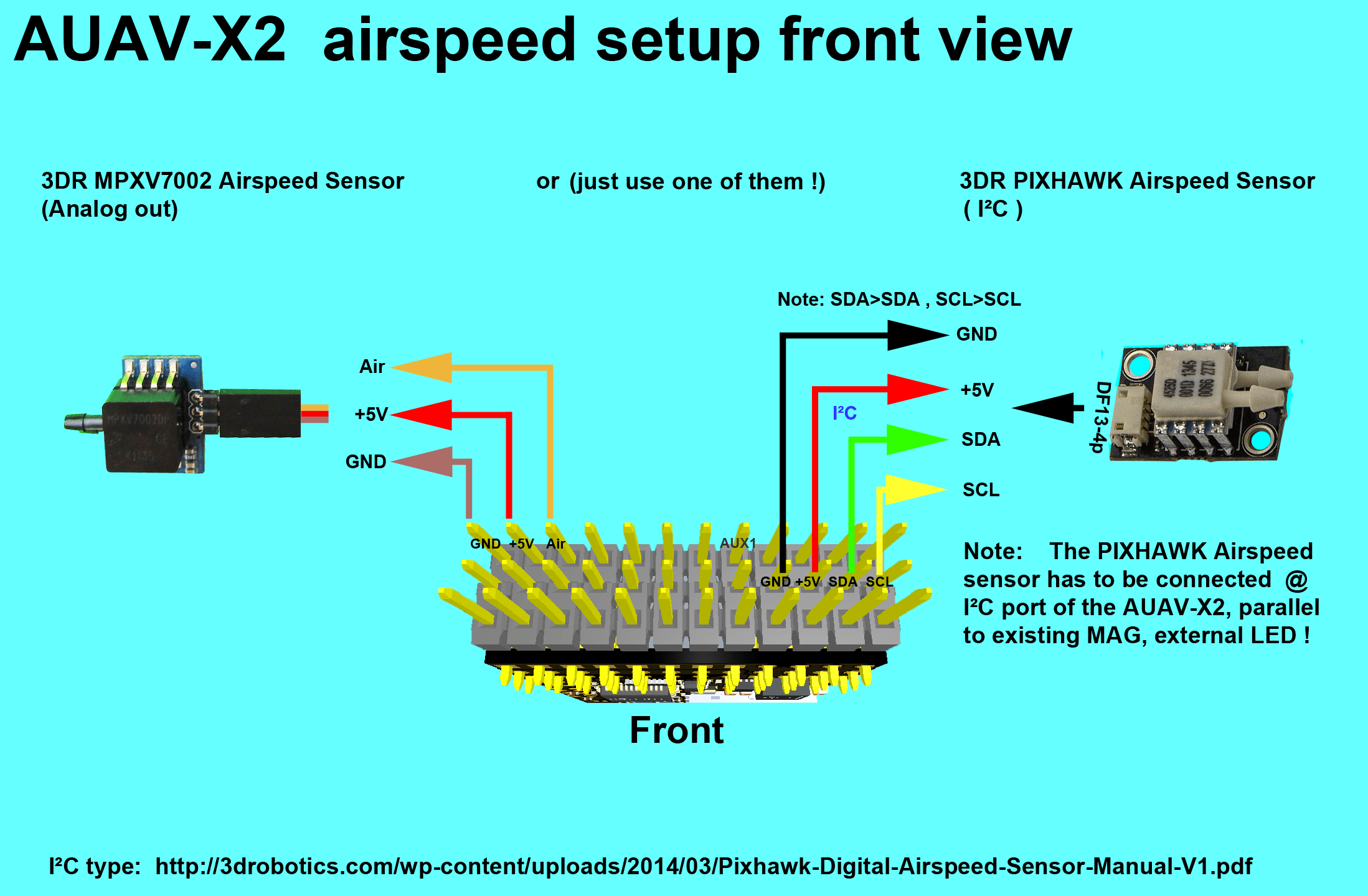
배선 가이드
회로도
The board is based on the Pixhawk project FMUv2 open hardware design.
- FMUv2 + IOv2 회로도 - 회로도 및 레이아웃
As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are available.
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO 디버그 |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | ||
| UART7 | 콘솔 | |
| UART8 | SERIAL4 |