Режим висоти (мультикоптер)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
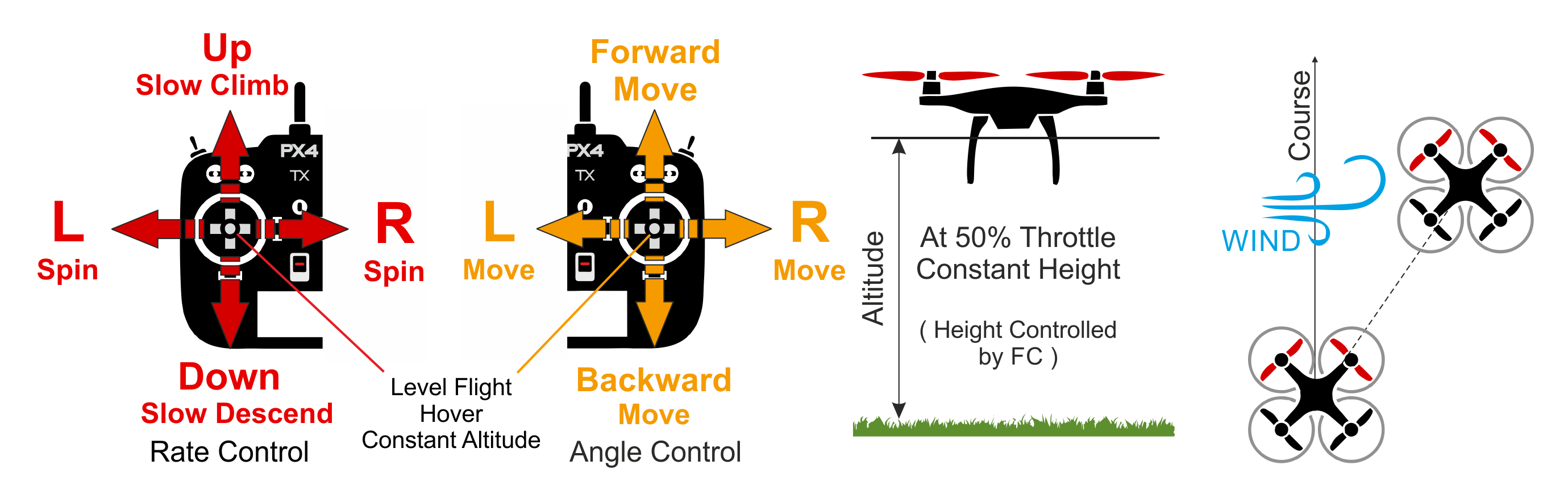
Режим висоти - це відносно простий у керуванні режим пульта дистанційного керування, в якому стики крену і тангажу керують рухом транспортного засобу в напрямках вліво-вправо і вперед-назад (відносно "переду" транспортного засобу), стик риштування керує швидкістю обертання над горизонтальною площиною, а дросель контролює швидкість підйому-спуску.
Коли стіки відпускаються/центруються, апарат вирівнюється і підтримує поточну висоту. Якщо апарат рухається в горизонтальній площині, він буде продовжувати рух до тих пір, поки будь-який імпульс не буде погашений опором вітру. Якщо дме вітер, літак буде дрейфувати у напрямку вітру.
TIP
Режим висоти - найбезпечніший ручний режим без GPS для нових льотчиків. Він схожий на Ручний/Стабілізація режим, але додатково фіксує висоту апарата, коли стіки відпускаються.
Діаграма нижче візуально показує поведінку режиму (для передавача режиму 2).
Технічний підсумок
РК/ручний режим подібний до режиму Посібник/Стабілізований (МК), але з стабілізацією висоти (центральні палиці рівняють транспортний засіб і утримують його на фіксованій висоті). Горизонтальне положення транспортного засобу може змінюватися через вплив вітру (або наявного імпульсу).
- Центровані палиці (в межах дедбенду):
- Рівень RPY прикріплюється до транспортного засобу.
- Дросель (~50%) утримує поточну висоту стабільно проти вітру.
- Зовнішній центр:
- Палиці кочення/крену керують кут нахилу у відповідних орієнтаціях, що призводить до відповідного руху ліворуч-праворуч та вперед-назад.
- Ручка дроселя керує швидкістю вгору/вниз з попередньо визначеною максимальною швидкістю (та швидкістю руху в інших осях).
- Палиця крену контролює швидкість кутової ротації вище горизонтальної площини.
- Зліт:
- Після посадки транспортний засіб злетить, якщо важіль керування газом підніметься вище 62.5% від повного діапазону (від низу).
- Висота зазвичай вимірюється за допомогою барометра, який може стати неточним в екстремальних погодних умовах. Транспортні засоби, які включають датчик LIDAR/дальнісний датчик, зможуть керувати висотою з більшою надійністю та точністю.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Крен, Тангаж: Допомога від автопілота для стабілізації польоту. Положення палиці RC відображає орієнтацію транспортного засобу.
- Газ: Допомога від автопілота для утримання позиції проти вітру.
- Курс: Допомога від автопілота для стабілізації швидкості польоту. Положення палиці RC відображає швидкість обертання транспортного засобу в цій орієнтації.
Параметри
На режим впливають наступні параметри:
| Параметр | Опис |
|---|---|
| MPC_Z_VEL_MAX_UP | Максимальна швидкість вертикального підйому. За замовчуванням: 3 m/s. |
| MPC_Z_VEL_MAX_DN | Максимальна швидкість вертикального спуску. За замовчуванням: 1 m/s. |
RCX_DZ | RC зона мертвої зони для каналу X. Значення X для керування газом буде залежати від значення RC_MAP_THROTTLE. Наприклад, якщо газ - це канал 4, то RC4_DZ вказує діапазон нечутливості. |
MPC_XXXX | Більшість параметрів MPC_xxx впливають на поведінку польоту в цьому режимі (принаймні до певної міри). Наприклад, MPC_THR_HOVER визначає тягу, при якій транспортний засіб буде утримуватися в повітрі. |