고도 모드 (멀티콥터)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "수동/원격 제어 필요")
")
Altitude mode is a relatively easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current altitude. 수평면에서 이동하는 경우 차량은 바람 저항에 의해 모멘텀이 소실 될 때까지 계속됩니다. 바람이 불면 기체는 바람의 방향으로 표류합니다.
TIP
Altitude mode is the safest non-GPS manual mode for new fliers. 수동 / 안정화 모드와 비슷하지만 스틱을 놓으면 기체의 고도가 계속 유지됩니다.
아래 다이어그램은 모드 동작을 시각적으로 보여줍니다 (모드 2 송신기의 경우).
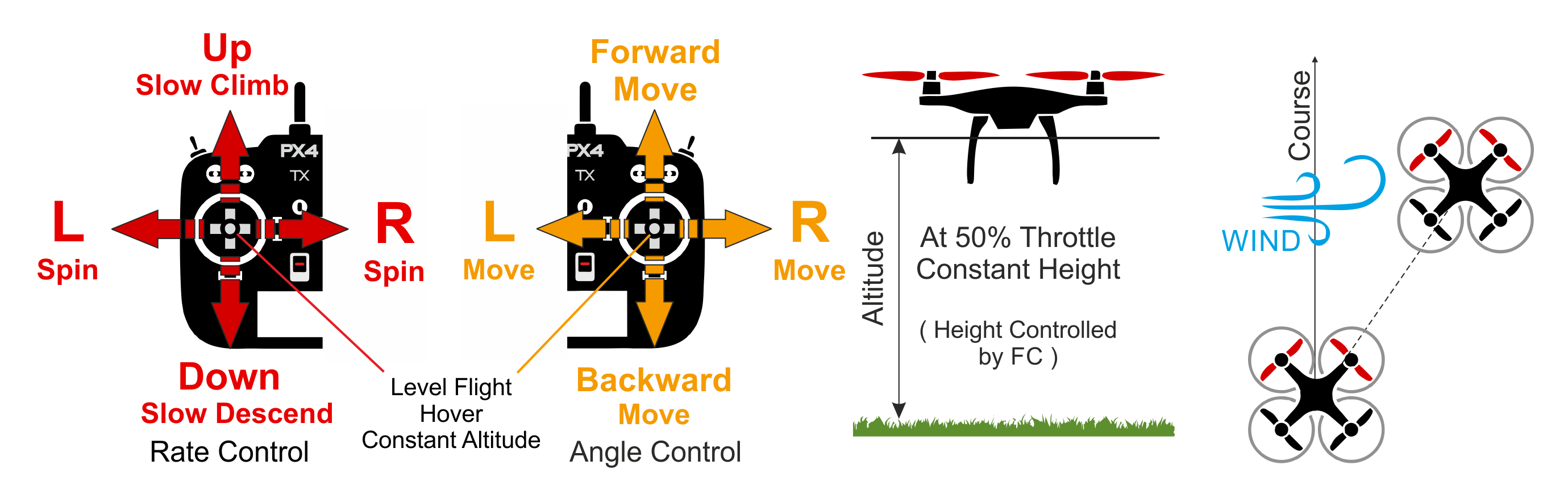
기술 요약
RC/manual mode like Manual/Stabilized (MC) mode but with altitude stabilization (centered sticks level vehicle and hold it to fixed altitude). The horizontal position of the vehicle can move due to wind (or pre-existing momentum).
- 중앙 스틱 (데드밴드 내부) :
- RPY sticks levels vehicle.
- 스로틀(~ 50 %)은 현재 고도를 바람에 대해 일정하게 유지합니다.
- 센터 외부:
- 롤/피치 스틱은 각각의 방향에서 틸트 각도를 제어하여 해당하는 좌우와 전후 방향으로 이동합니다.
- 스로틀 스틱은 미리 정해진 최대 속도 (및 다른 축의 이동 속도)로 속도를 올리거나 내립니다.
- 요 스틱은 수평면 위의 회전 각속도를 제어합니다.
- 이륙:
- 착륙했을 때 스로틀 스틱을 62.5 % (하단에서 전체 범위) 이상으로 올리면 기체가 이륙합니다.
- Altitude is normally measured using a barometer, which may become inaccurate in extreme weather conditions. LIDAR/거리 센서가 장착된 기체는 높은 정확도로 고도를 제어할 수 있습니다.
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch: Assistance from autopilot to stabilize the attitude. Position of RC stick maps to the orientation of vehicle.
- Throttle: Assistance from autopilot to hold position against wind.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
매개 변수
이 모드는 아래의 매개 변수의 영향을받습니다.
| 매개 변수 | 설명 |
|---|---|
| MPC_Z_VEL_MAX_UP | 최대 수직 상승 속도. 기본값: 3 m/s. |
| MPC_Z_VEL_MAX_DN | 최대 수직 하강 속도. 기본값: 1 m/s. |
RCX_DZ | 채널 X의 RC 데드 존. 스로틀에 대한 X 값은 RC_MAP_THROTTLE 값에 따라 달라집니다. For example, if the throttle is channel 4 then RC4_DZ specifies the deadzone. |
MPC_XXXX | 대부분의 MPC_xxx 매개 변수는이 모드에서 비행 동작에 어느정도 영향을 미칩니다 . 예를 들어, MPC_THR_HOVER는 기체의 호버링 추력을 정의합니다. |