Listener 명령을 사용한 센서/토픽 디버깅
The uORB is an asynchronous publish() / subscribe() messaging API used for inter-thread/inter-process communication. The listener command can be used from the QGroundControl MAVLink Console to inspect topic (message) values, including the current values published by sensors.
TIP
이것은 QGC가 무선 틍신으로 연결된 경우에도(예: 차량이 비행 중일 때) 사용할 수 있는 강력한 디버깅 도구입니다.
INFO
The listener command is also available through the System Console and the MAVLink Shell.
TIP
To check what topics are available at what rate, just use the uorb top command.
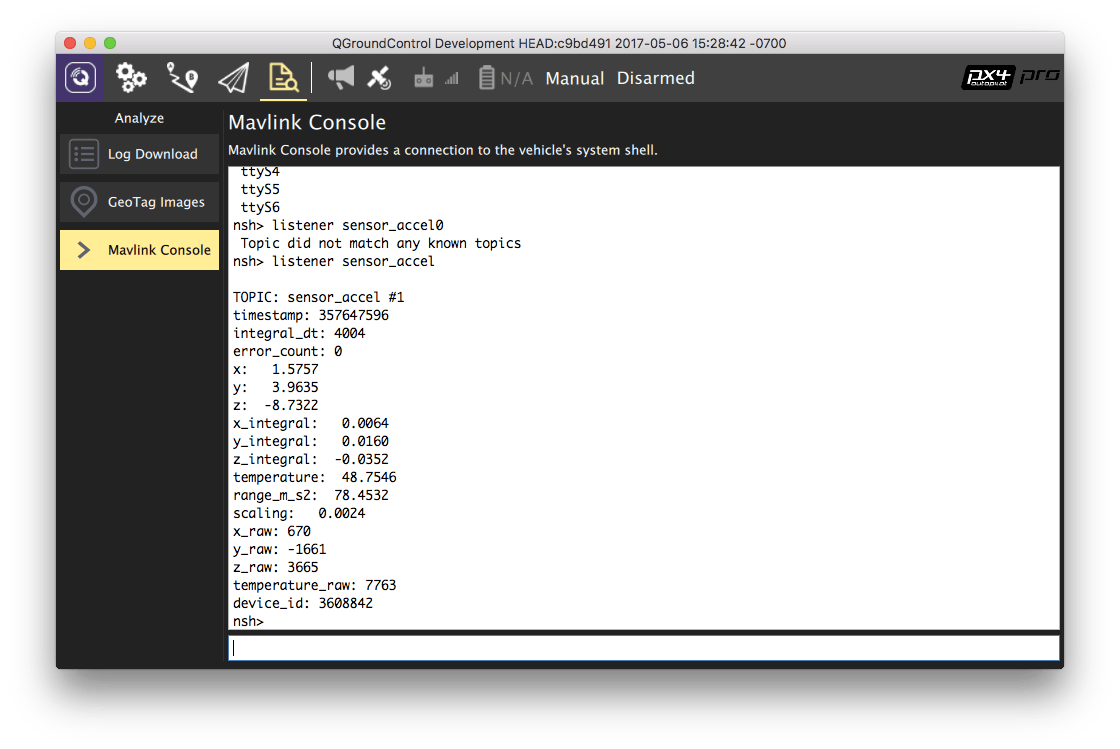
The image below demonstrates QGroundControl being used to get the value of the acceleration sensor.
For more information about how to determine what topics are available and how to call listener see: uORB Messaging > Listing Topics and Listening in.