임무
A mission is a predefined flight plan, which can be planned in QGroundControl and uploaded to the flight controller, and then executed autonomously in Mission mode.
Missions typically include items for controlling taking off, flying a sequence of waypoints, capturing images and/or video, deploying cargo, and landing. QGroundControl allows you to plan missions using a fully manual approach, or you can use its more advanced features to plan ground area surveys, corridor surveys, or structure surveys.
This topic provides an overview of how to plan and fly missions.
임무 계획하기
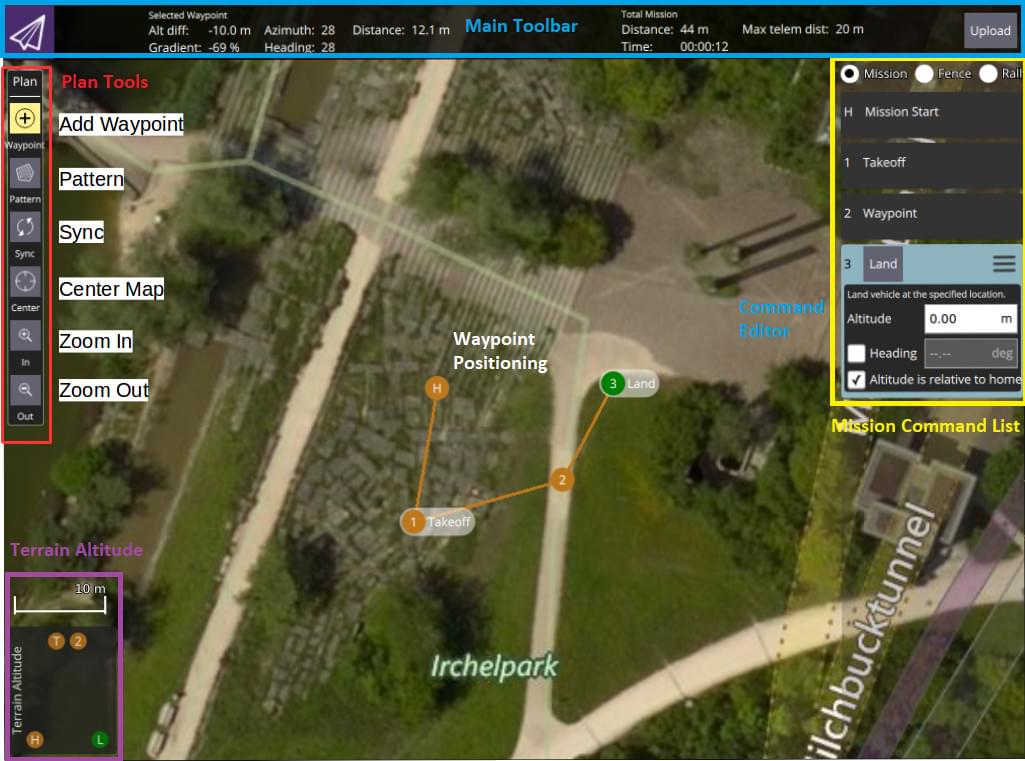
수동으로 임무를 계획하는 것은 비교적 간단합니다.
- 임무 보기로 전환합니다.
- Select the Add Waypoint ("plus") icon in the top left.
- 지도를 클릭하여 경유지를 추가합니다.
- Use the waypoint list on the right to modify the waypoint parameters/type The altitude indicator on the bottom provides a sense of the relative altitude of each waypoint.
- Once finished, click on the Upload button (top right) to send the mission to the vehicle.
You can also use the Pattern tool to automate creation of survey grids.
TIP
For more information see the QGroundControl User Guide.
Mission Feasibility Checks
PX4 runs some basic sanity checks to determine if a mission is feasible. For example, whether the mission is close enough to the vehicle, if the mission will conflict with a geofence, or if a mission landing pattern is required but is not present.
The checks are run when the mission is uploaded and immediately before it is run. If any of the checks fail, the user is notified and it is not possible to start the mission.
For more detail on the checks and possible actions, see: Mission Mode (FW) > Mission Feasibility Checks and Mission Mode (MC) > Mission Feasibility Checks.
기체 요 각도 설정
If set, a multi-rotor vehicle will yaw to face the Heading value specified in the target waypoint (corresponding to MAV_CMD_NAV_WAYPOINT.param4).
If Heading has not been explicitly set for the target waypoint (param4=NaN) then the vehicle will yaw towards a location specified in the parameter MPC_YAW_MODE. 기본적으로 이것은 다음 경유지입니다.
Vehicle types that cannot independently control yaw and direction of travel will ignore yaw settings (e.g. Fixed-wing).
수용 회전 반경 설정
The acceptance radius defines the circle around a waypoint within which a vehicle considers it has reached the waypoint, and will immediately switch to (and start turning towards) the next waypoint.
For a multi-rotor drones, the acceptance radius is tuned using the parameter NAV_ACC_RAD. 기본적으로 반경은 멀티 로터가 웨이포인트 위로 지나갈 수 있도록 작지만 드론이 웨이포인트에 도달하기 전에 회전을 시작하도록 더 부드러운 경로를 만들기 위해 증가시킬 수 있습니다.
아래 이미지는 다른 수용 반경 매개 변수로 비행한 동일한 임무 비행를 나타냅니다.

The speed in the turn is automatically computed based on the acceptance radius (= turning radius) and the maximum allowed acceleration and jerk (see Jerk-limited Type Trajectory for Multicopters).
TIP
For more information about the impact of the acceptance radius around the waypoint see: Mission Mode > Inter-waypoint Trajectory.
Package Delivery (Cargo) Missions
PX4 supports cargo delivery in missions using a gripper.
This kind of mission is planned in much the same as any other waypoint mission, with mission start, takeoff waypoint, various path waypoints, and possibly a return waypoint. The only difference is that a package delivery mission must include a mission items to indicate how the package is released and the deployment mechanism. For more information see: Package Delivery Mission.
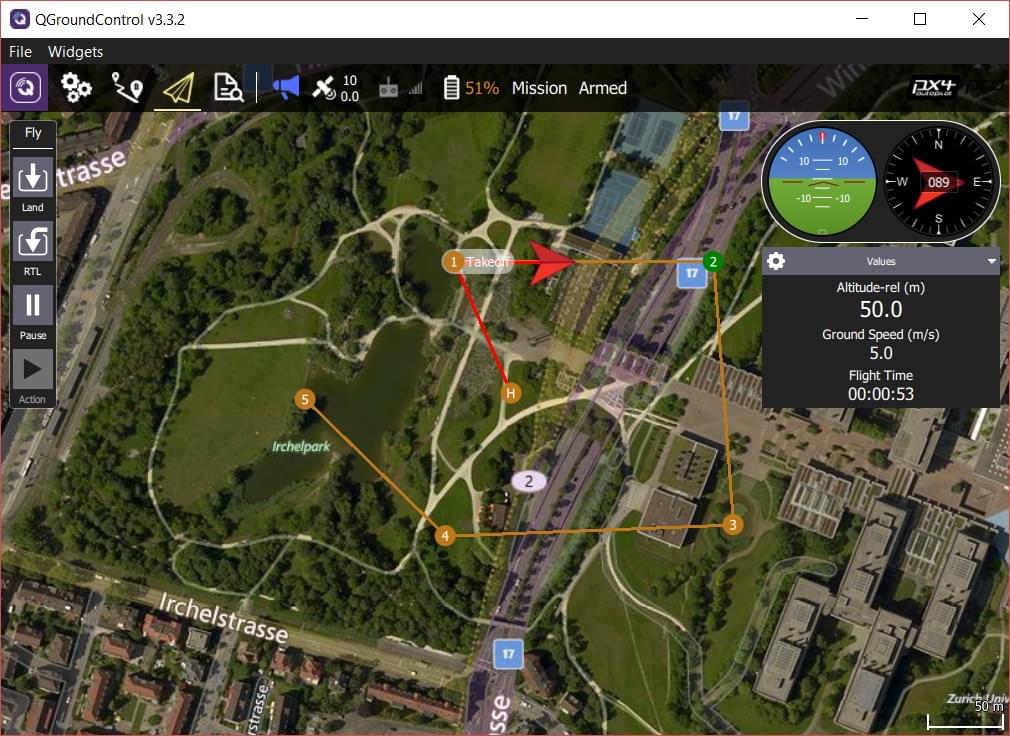
임무 비행
임무가 업로드 되면 비행 보기로 전환합니다. 임무는 진행 상황을 쉽게 추적하도록 표시됩니다. 이보기에서 임무를 수정할 수 없습니다.