mRo-X2.1 Autopilot (Discontinued)
DiscontinuedWARNING
This flight controller has been discontinued and is no longer commercially available.
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
The mRo-X2.1 autopilot is based on the Pixhawk®-project FMUv2 open hardware design. It runs PX4 on the NuttX OS.

INFO
This flight controller is manufacturer supported.
요약
- Main System-on-Chip: STM32F427
- CPU : STM32F427VIT6 ARM® 마이크로 컨트롤러 - 개정판 3
- IO: STM32F100C8T6 ARM® 마이크로 컨트롤러
- 센서:
- Invensense® MPU9250 9DOF
- Invensense ICM-20602 6DOF
- MEAS MS5611 기압계
- 크기/중량
- Size: 36mm x 50mm (Can be ordered with vertical, horizontal or no headers installed)
- 장착 위치: 직경 30.5mm x 30.5mm 3.2mm
- 중량: 10.9g
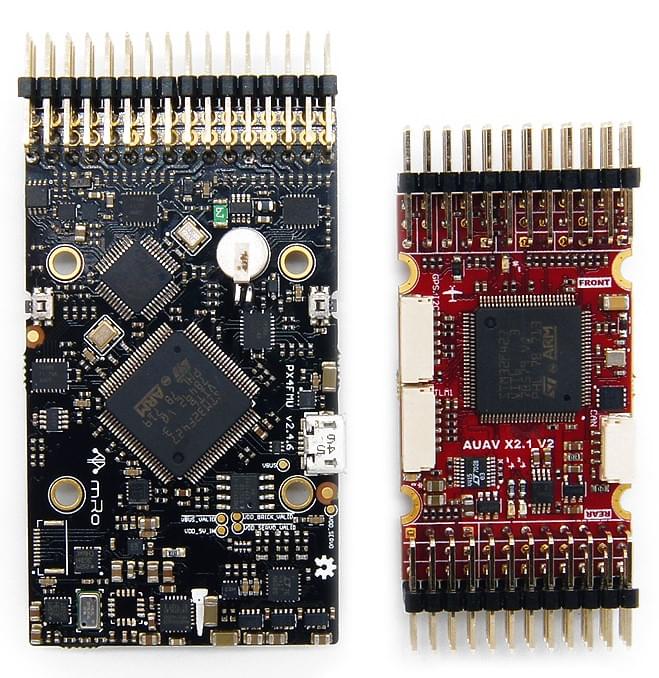
아래 다이어그램은 Pixhawk 1과 비교한 것입니다. mRo는 거의 동일한 하드웨어와 연결 기능을 제공하지만, 설치 공간이 훨씬 작습니다. 주요 차이점은 업데이트된 센서와 Rev 3 FMU입니다.
연결성
- 2.54mm 헤더 :
- I2C가 장착 된 GPS(UART4)
- CAN 버스
- RC 입력
- PPM 입력
- Spektrum 입력
- RSSI 입력
- sBus 입력
- sBus 출력
- 전원 입력
- 부저 출력
- LED 출력
- Servo 출력 8개
- Aux 출력 6개
- 오프 보드 microUSB 커넥터
- Kill Pin output (Currently not supported by firmware)
- 항속 센서
- USART2 (Telem 1)
- USART3 (Telem 2)
- UART7 (콘솔)
- UART8 (OSD)
PX4 부트로더 문제
기본적으로 mRo X2.1은 PX4가 아닌 ArduPilot® 용으로 미리 설정되어 제공될 수 있습니다. This can be seen during firmware update when the board is recognized as FMUv2 instead of X2.1.
In this case you must update the BootLoader using BL_Update_X21.zip. 이 캘리브레이션을 수행하지 않으면 나침반 방향이 잘못되어 보조 IMU는 감지되지 않을 수 있습니다.
업데이트 단계는 다음과 같습니다.
- Download and extract BL_Update_X21.zip.
- Find the folder BL_Update_X21. This contains a bin file and a subfolder named /etc containing an rc.txt file
- 이 파일을 마이크로 SD 카드의 루트 디렉토리에 복사하여 mRO x2.1에 삽입하십시오.
- Mro x2.1의 전원을 켜십시오. 부팅시까지 기다렸다가 한 번 재부팅하십시오.
구매처
This product can be ordered at the mRobotics® Store.
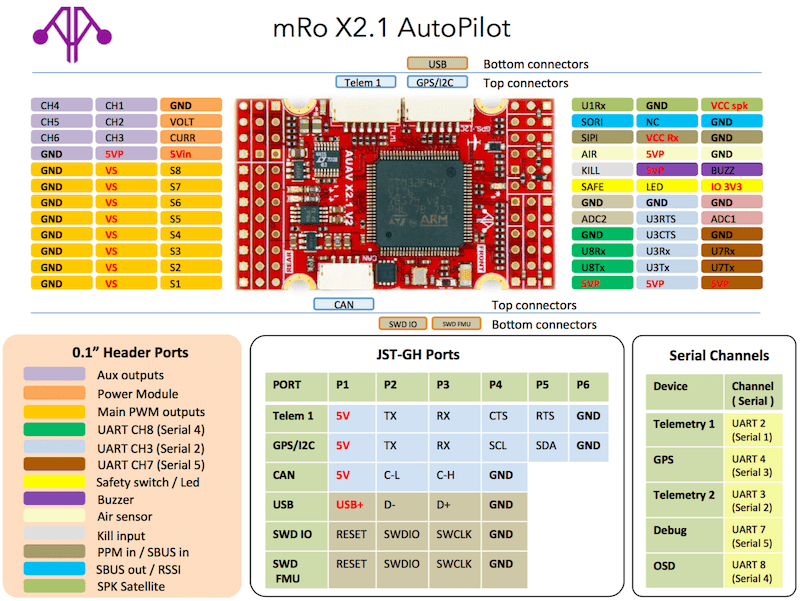
배선 가이드
펌웨어 빌드
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make mro_x21_default회로도
The board is documented on the mRo hardware repo: x21_V2_schematic.pdf.
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | IO 디버그 |
| USART2 | /dev/ttyS1 | SERIAL1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS/I2C |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | SERIAL5 콘솔 |
| UART8 | /dev/ttyS6 | SERIAL4 |