귀환 모드
")
The Return flight mode is used to fly a vehicle to safety on an unobstructed path to a safe destination, where it should land.
PX4는 홈 위치, 집결 ( "안전") 지점, 임무 경로 및 임무 착륙 시퀀스 사용을 포함하여 안전한 복귀 경로, 목적지 착륙을 위한 다양한 메커니즘을 제공합니다.
INFO
- Mode is automatic - no user intervention is required to control the vehicle.
- Mode requires a global 3d position estimate (from GPS or inferred from a local position).
- Flying vehicles can't switch to this mode without global position.
- Flying vehicles will failsafe if they lose the position estimate.
- Mode requires home position is set.
- Mode prevents arming (vehicle must be armed when switching to this mode).
- RC 제어 스위치는 기체의 비행 모드를 변경할 수 있습니다.
- RC stick movement in a multicopter (or VTOL in multicopter mode) will by default change the vehicle to Position mode unless handling a critical battery failsafe.
- A VTOL will return as MC or FW based on its mode at the point the return mode was triggered. In MC mode it will respect multicopter parameters, such as the landing "cone". In FW mode it will respect fixed-wing parameters (ignore the cone), but unless using a mission landing, will transition to MC mode and land at the destination after loitering at the descent altitude.
개요
PX4 provides several mechanisms for choosing a safe return path, destination and landing, including using home location, rally ("safe") points, mission paths, and landing sequences defined in a mission.
All vehicles nominally support all of these mechanisms, but not all of them make as much sense for particular vehicles. For example, a multicopter can land virtually anywhere, so it doesn't make sense for it to use a landing sequence except in rare cases. Similarly, a fixed-wing vehicle needs to fly a safe landing path: it can use the home location as a return point, but it won't try and land on it by default.
This topic covers all the possible return types that any vehicle might be configured to use — the vehicle-specific return mode topics cover the default/recommended return type and configuration for each vehicle.
The following sections explain how to configure the return type, minimum return altitude and landing/arrival behaviour.
복귀 유형(RTL_TYPE)
PX4 provides four alternative approaches for finding an unobstructed path to a safe destination and/or landing, which are set using the RTL_TYPE parameter.
At high level these are:
- Home/rally point return (
RTL_TYPE=0): Ascend to safe altitude and return via a direct path to the closest rally point or home location. - Mission landing/rally point return (
RTL_TYPE=1): Ascend to a safe altitude, fly direct to the closest destination other than home: rally point or start of mission landing. 임무 착륙 또는 집결 지점이 정의되지 않은 경우에는 직접 경로를 통해 홈으로 복귀합니다. - Mission path return (
RTL_TYPE=2): Use mission path and fast-continue to mission landing (if defined). If no mission landing defined, fast-reverse mission to home. If no mission defined, return direct to home (rally points are ignored). - Closest safe destination return (
RTL_TYPE=3): Ascend to a safe altitude and return via direct path to closest destination: home, start of mission landing pattern, or rally point. 목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다.
각 유형에 대한 자세한 설명은 다음 섹션에서 제공됩니다.
홈/랠리 포인트 복귀 유형 (RTL_TYPE = 0)
This is the default return type for a multicopter (see topic for more information).
이 복귀 유형에서 기체의 동작:
- Ascends to a safe minimum return altitude (above any expected obstacles).
- 홈 포지션 또는 랠리 포인트 (둘 중 가장 가까운 지점) 로의 직접 경로로 비행합니다.
- On arrival descends to "descent altitude" and waits for a configurable time. This time may be used to deploy landing gear.
- Lands or waits (this depends on landing parameters), By default an MC or VTOL in MC mode will land and a fixed-wing vehicle circles at the descent altitude. A VTOL in FW mode aligns its heading to the destination point, transitions to MC mode, and then lands.
INFO
If no rally points are defined, this is the same as a Return to Launch (RTL)/Return to Home (RTH).
임무 착륙/랠리 포인트 복귀 유형 (RTL_TYPE = 1)
This is the default return type for a fixed-wing or VTOL vehicle (see topics for more information).
이 복귀 유형에서 기체의 동작:
Ascends to a safe minimum return altitude (above any expected obstacles) if needed. The vehicle maintains its initial altitude if that is higher than the minimum return altitude.
Flies via direct constant-altitude path to a rally point or the start of a mission landing pattern (whichever is closest). 임무 착륙 또는 집결 지점이 정의되지 않은 경우에는 기체는 직접 경로를 통하여 홈으로 복귀합니다.
목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다.
If the destination is a rally point or home it will land or wait at descent altitude (depending on landing parameters). By default an MC or VTOL in MC mode will land, and a fixed-wing vehicle circles at the descent altitude.
A VTOL in FW mode can first fly a VTOL approach loiter associated with that destination. A VTOL approach loiter is a MAV_CMD_NAV_LOITER_TO_ALT item that the vehicle uses to descend to the approach altitude. For upload details, see VTOL Fixed-wing Mode Return. If several approach loiters are defined for the destination, PX4 chooses the most wind-aligned one. It then flies from the approach loiter to the destination point, transitions to MC mode at the destination, and lands.
INFO
Fixed wing vehicles commonly also set MIS_TKO_LAND_REQ to require a mission landing pattern.
임무 경로 복귀 유형 (RTL_TYPE = 2)
This return type uses the mission (if defined) to provide a safe return path, and the mission landing pattern (if defined) to provide landing behaviour. If there is a mission but no mission landing pattern, the mission is flown in reverse. 랠리 포인트는 무시됩니다.
INFO
The behaviour is fairly complex because it depends on the flight mode, and whether a mission and mission landing are defined.
Mission with landing pattern:
- Mission mode:
- Mission is continued in "fast-forward mode" and then lands.
- DO_JUMP commands, delays and other non-position mission items are ignored, and loiter and other position waypoints are converted to simple waypoints.
- Mission is continued in "fast-forward mode" and then lands.
- Auto mode other than mission mode:
- Ascend to a safe minimum return altitude above any expected obstacles.
- 가장 가까운 웨이포인트 (착륙 WP가 아닌 FW의 경우)로 직접 비행하고 웨이포인트 고도로 하강합니다.
- Continue mission in fast forward mode from that waypoint, using the same traversal rules as above.
- Manual modes:
- Ascend to a safe minimum return altitude above any expected obstacles.
- 착륙 순서 위치로 직접 비행하고 웨이포인트 고도로 하강합니다.
- 임무 착륙 패턴을 사용하는 착륙
Mission without landing pattern defined:
- Mission mode:
- 이전 웨이포인트에서 시작하여 "빨리 후진"(역방향) 비행한 미션
- DO_JUMP commands, delays and other non-position mission items are ignored, and loiter and other position waypoints are converted to simple waypoints.
- VTOL은 임무를 역으로 비행하기 전에 필요한 경우에는 고정익 모드로 전환합니다.
- On reaching waypoint 1, the vehicle ascends to the minimum return altitude and flies to the home position (where it lands or waits).
- 이전 웨이포인트에서 시작하여 "빨리 후진"(역방향) 비행한 미션
- Auto mode other than mission mode:
- 가장 가까운 웨이포인트 (착륙 WP가 아닌 FW의 경우)로 직접 비행하고 웨이포인트 고도로 하강합니다.
- 미션 모드 (위)에서 복귀 모드가 시작된 것처럼 임무를 반대로 계속 수행합니다.
- Manual modes: Fly directly to home location and land.
미션이 정의되지 않은 경우 PX4는 홈 위치에 착륙합니다(랠리 포인트는 무시됨).
복귀 모드에서 임무가 변경되면 위와 동일한 규칙에 따라 새 임무에 따라 행동이 재평가됩니다 (예 : 새 임무에 착륙 순서가없고 임무를 수행중인 경우 임무가 반전 됨).
INFO
For RTL_TYPE=4, PX4 currently chooses between continuing to a mission landing and reversing toward home by comparing raw mission item indices. This is only an approximation of the flown path length, because the number if mission items is not indicative of the distance remaining and non-position items are also counted.
가장 가까운 안전한 대상 복귀 유형 (RTL_TYPE = 3)
이 복귀 유형에서 기체의 동작:
- Ascends to a safe minimum return altitude (above any expected obstacles).
- 홈 위치, 미션 착륙 패턴 또는 집결 지점의 가장 가까운 목적지로 직접 이동합니다.
- If the destination is a mission landing pattern the vehicle will follow the pattern to land.
- If the destination is a home location or rally point, the vehicle will descend to the descent altitude (RTL_DESCEND_ALT) and then lands or waits. By default an MC or VTOL in MC mode will land, and a fixed-wing vehicle circles at the descent altitude. A VTOL in FW mode aligns its heading to the destination point, transitions to MC mode, and then lands.
목적지에 호버링/착륙
For most return types a vehicle will ascend to a minimum safe altitude before returning (unless already above that altitude), in order to avoid any obstacles between it and the destination.
INFO
The exception is when executing a mission path return from within a mission. In this case the vehicle follows mission waypoints, which we assume are planned to avoid any obstacles.
The return altitude for a fixed-wing vehicle or a VTOL in fixed-wing mode is configured using the parameter RTL_RETURN_ALT (does not use the code described in the next paragraph).
The return altitude for a multicopter or a VTOL vehicles in MC mode is configured using the parameters RTL_RETURN_ALT and RTL_CONE_ANG, which define a half cone centered around the destination (home location or safety point).
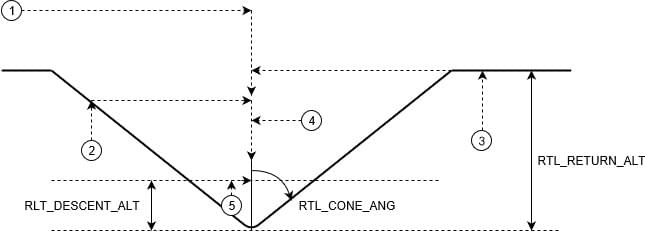
기체가 다음과 같은 경우 :
- Above RTL_RETURN_ALT (1) it will return at its current altitude.
- Below the cone it will return where it intersects the cone (2) or RTL_DESCEND_ALT (whichever is higher).
- Outside the cone (3) it will first climb until it reaches RTL_RETURN_ALT.
- 원뿔 내에서
- Above RTL_DESCEND_ALT (4) it will return at its current altitude.
- Below RTL_DESCEND_ALT (5) it will first ascend to
RTL_DESCEND_ALT.
참고:
- If RTL_CONE_ANG is 0 degrees there is no "cone":
- the vehicle returns at
RTL_RETURN_ALT(or above).
- the vehicle returns at
- If RTL_CONE_ANG is 90 degrees the vehicle will return at the greater of
RTL_DESCEND_ALTand the current altitude. - The vehicle will always ascend at least RTL_DESCEND_ALT for the return.
기체 기본 동작
Unless executing a mission landing pattern as part of the return mode, the vehicle will arrive at its destination, and rapidly descend to the RTL_DESCEND_ALT altitude, where it will loiter for RTL_LAND_DELAY before landing. If RTL_LAND_DELAY=-1 it will loiter indefinitely.
The default landing configuration is vehicle dependent:
- 임무 착륙이 정의된 경우 임무 착륙 시작 지점으로 직접 비행후 착륙합니다.
- Fixed-wing vehicles use a return mode with a mission landing pattern, as this enables automated landing. If not using a mission landing, the default configuration is to loiter indefinitely, so the user can take over and manually land.
- VTOLs in MC mode fly and land exactly as a multicopter.
- VTOLs in FW mode head towards the landing point, transition to MC mode, and then land on the destination. If a VTOL approach loiter is defined for a rally point or home location, the vehicle uses that loiter to reach the approach altitude, then flies to the destination before back-transitioning.
Mission Landing Pattern
A mission landing pattern is a landing pattern defined as part of a mission plan. This consists of a MAV_CMD_DO_LAND_START, one or more position waypoints, and a MAV_CMD_NAV_LAND (or MAV_CMD_NAV_VTOL_LAND for a VTOL Vehicle).
Landing patterns defined in missions are the safest way to automatically land a fixed-wing vehicle on PX4. For this reason fixed-wing vehicles are configured to use Mission landing/really point return by default.
매개변수
The RTL parameters are listed in Parameter Reference > Return Mode (and summarised below).
| 매개변수 | 설명 |
|---|---|
| RTL_TYPE | Return mechanism (path and destination).0: Return to a rally point or home (whichever is closest) via direct path.1: Return to a rally point or the mission landing pattern start point (whichever is closest), via direct path. 임무 착륙 또는 집결 지점이 모두 정의되지 않은 경우에는 직접 경로를 통해 홈으로 복귀합니다. If the destination is a mission landing pattern, follow the pattern to land.2: Use the mission path to landing while skipping DO_JUMP and other non-position mission items if a landing pattern is defined, otherwise fast-reverse to home with the same traversal rules. 랠리포인트를 무시합니다. Fly direct to home if no mission plan is defined.3: Return via direct path to closest destination: home, start of mission landing pattern or safe point. 목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다. |
| RTL_RETURN_ALT | Return altitude in meters (default: 60m) when RTL_CONE_ANG is 0. 이미 이 값을 초과하면 기체는 현재 고도로 복귀합니다. |
| RTL_DESCEND_ALT | 기체가 더 높은 복귀 고도에서 감속하거나 초기 하강을 중지할 최소 복귀 고도 및 고도 (기본값 : 30m) |
| RTL_LAND_DELAY | Time to wait at RTL_DESCEND_ALT before landing (default: 0.5s) -by default this period is short so that the vehicle will simply slow and then land immediately. If set to -1 the system will loiter at RTL_DESCEND_ALT rather than landing. 이 지연은 랜딩 기어가 배치될 시간을 설정합니다. (자동으로 동작함). |
| RTL_MIN_DIST | 홈 위치에서 "원뿔"에 지정된 복귀 고도까지 상승을 시작하는 최소 수평 거리. If the vehicle is horizontally closer than this distance to home, it will return at its current altitude or RTL_DESCEND_ALT (whichever is higher) instead of first ascending to RTL_RETURN_ALT. |
| RTL_CONE_ANG | 기체 RTL 리턴 고도를 정의하는 원뿔의 반각. 값 (도) : 0, 25, 45, 65, 80, 90. Note that 0 is "no cone" (always return at RTL_RETURN_ALT or higher), while 90 indicates that the vehicle must return at the current altitude or RTL_DESCEND_ALT (whichever is higher). |
| RTL_APPR_FORCE | [VTOL FW only] If set, home or rally-point RTL destinations are only considered when a valid VTOL approach loiter is defined for that landing location. Mission landing patterns are unaffected. |
| COM_RC_OVERRIDE | Controls whether stick movement on a multicopter (or VTOL in MC mode) causes a mode change to Position mode (except when vehicle is handling a critical battery failsafe). 자동 모드와 오프보드 모드에 대해 별도로 활성화할 수 있으며, 기본적으로 자동 모드에서 활성화됩니다. |
| COM_RC_STICK_OV | The amount of stick movement that causes a transition to Position mode (if COM_RC_OVERRIDE is enabled). |
| RTL_LOITER_RAD | [Fixed-wing Only] The radius of the loiter circle (at RTL_LAND_DELAY). |
| MIS_TKO_LAND_REQ | Specify whether a mission landing or takeoff pattern is required. Generally fixed-wing vehicles set this to require a landing pattern but VTOL do not. |