mRo-X2.1 자동조종장치
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 제조사에 문의하십시오.
mRo-X2.1 자동 조종 장치는 Pixhawk® - 프로젝트 FMUv2 오픈 하드웨어 디자인을 기반으로합니다. PX4를 NuttX OS에서 실행합니다.

:::note 이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다. :::
요약
- 메인 시스템 온칩: STM32F427
- CPU : STM32F427VIT6 ARM® 마이크로 컨트롤러 - 개정판 3
- IO: STM32F100C8T6 ARM® 마이크로 컨트롤러
- 센서:
- Invensense® MPU9250 9DOF
- Invensense ICM-20602 6DOF
- MEAS MS5611 기압계
- 크기/중량
- 크기: 36mm x 50mm (수직, 수평 또는 헤더가 설치되지 않은 상태로 주문 가능)
- 장착 지점 : 직경 30.5mm x 30.5mm 3.2mm
- 중량: 10.9g
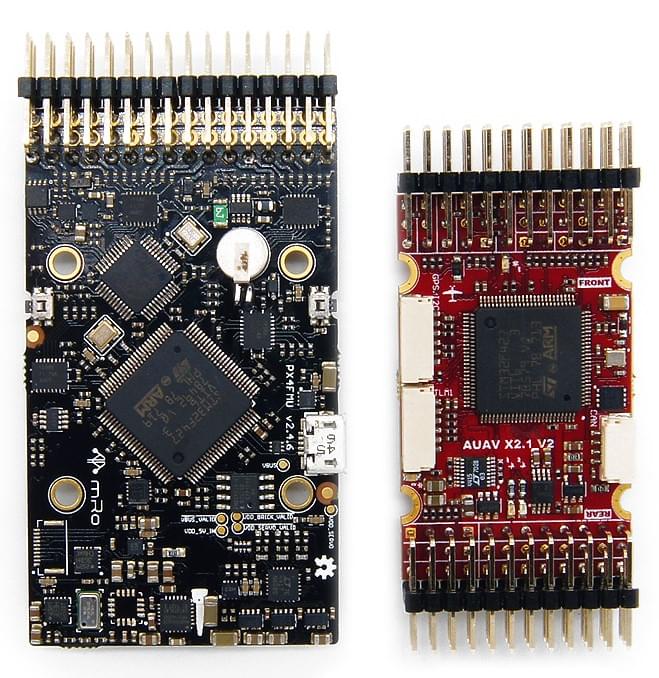
아래 다이어그램은 Pixhawk 1과 비교한 것입니다. mRo는 거의 동일한 하드웨어와 연결 기능을 제공하지만, 설치 공간이 훨씬 작습니다. 주요 차이점은 업데이트된 센서와 Rev 3 FMU입니다.
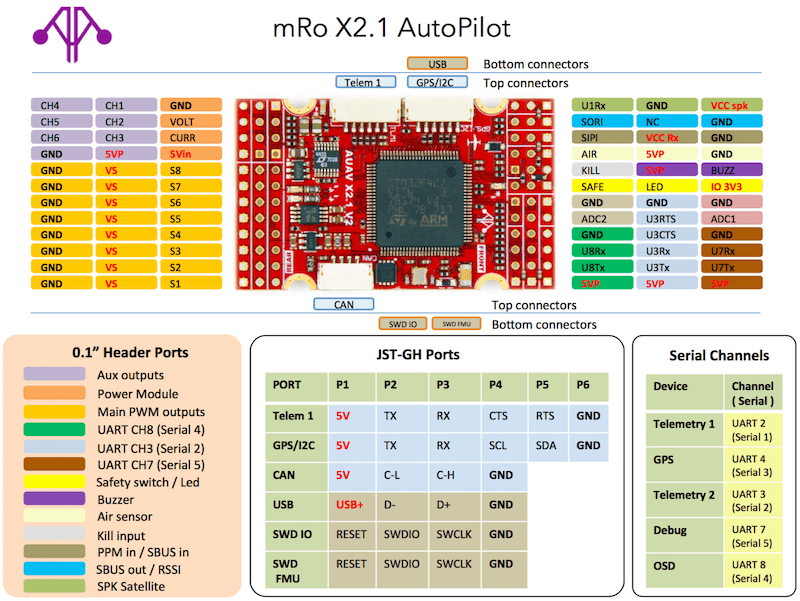
연결성
- 2.54mm 헤더 :
- I2C가 장착 된 GPS(UART4)
- CAN 버스
- RC 입력
- PPM 입력
- Spektrum 입력
- RSSI 입력
- sBus 입력
- sBus 출력
- 전원 입력
- 부저 출력
- LED 출력
- Servo 출력 8개
- Aux 출력 6개
- 오프 보드 microUSB 커넥터
- Kill Pin output (Currently not supported by firmware)
- 항속 센서
- USART2 (Telem 1)
- USART3 (Telem 2)
- UART7 (콘솔)
- UART8 (OSD)
PX4 부트로더 문제
기본적으로 mRo X2.1은 PX4가 아닌 ArduPilot® 용으로 미리 설정되어 제공될 수 있습니다. This can be seen during firmware update when the board is recognized as FMUv2 instead of X2.1.
이 경우 BL_Update_X21.zip을 사용하여 부트로더를 업데이트하여합니다 이 캘리브레이션을 수행하지 않으면 나침반 방향이 잘못되어 보조 IMU는 감지되지 않을 수 있습니다. 이 캘리브레이션을 수행하지 않으면 나침반 방향이 잘못되어 보조 IMU는 감지되지 않을 수 있습니다.
업데이트 단계는 다음과 같습니다.
- BL_Update_X21.zip을 다운로드하고 압축을 해제하십시오.
- Find the folder BL_Update_X21. 여기에는 rc.txt 파일이 들어있는 bin 파일과 /etc 하위 폴더가 있습니다
- 이 파일을 마이크로 SD 카드의 루트 디렉토리에 복사하여 mRO x2.1에 삽입하십시오.
- Mro x2.1의 전원을 켜십시오. 부팅시까지 기다렸다가 한 번 재부팅하십시오.
구매처
이 제품은 mRobotics® 상점에서 주문할 수 있습니다.
배선 가이드
펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
:::
이 대상에 대한 PX4 빌드 방법 :
make mro_x21_default회로도
이 보드는 mRo 하드웨어 저장수 x21_V2_schematic.pdf에 문서화되어 있습니다.
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | IO 디버그 |
| USART2 | /dev/ttyS1 | SERIAL1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS/I2C |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | SERIAL5 콘솔 |
| UART8 | /dev/ttyS6 | SERIAL4 |