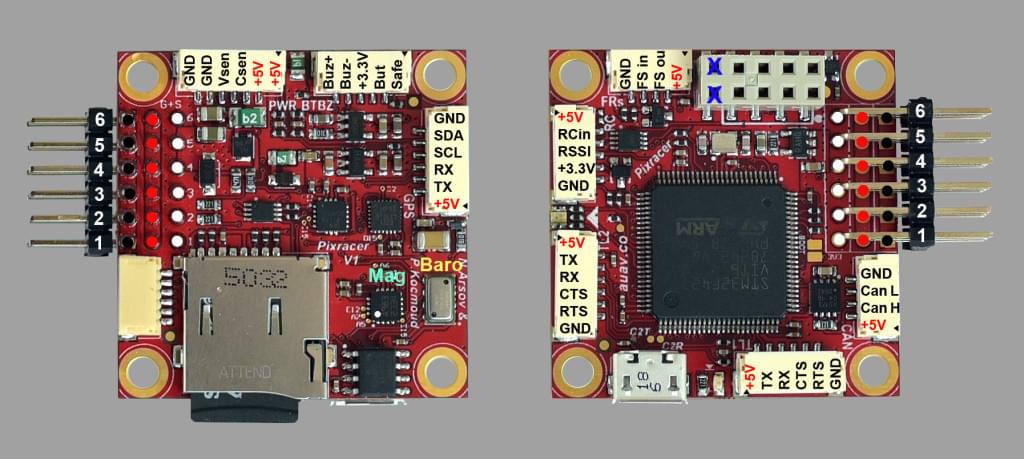
Pixracer 배선 개요
PX4에서는 이 자동 항법 장치를 제조하지 않습니다. 하드웨어 지원이나 호환 문제는 제조사에 문의하십시오.
WARNING
작성 중인 문서입니다
Pixracer 비행 콘트롤러 전원 공급방법과 주변 장치 연결방법을 설명합니다.

무선 가이드/조립 방법
기본 설정
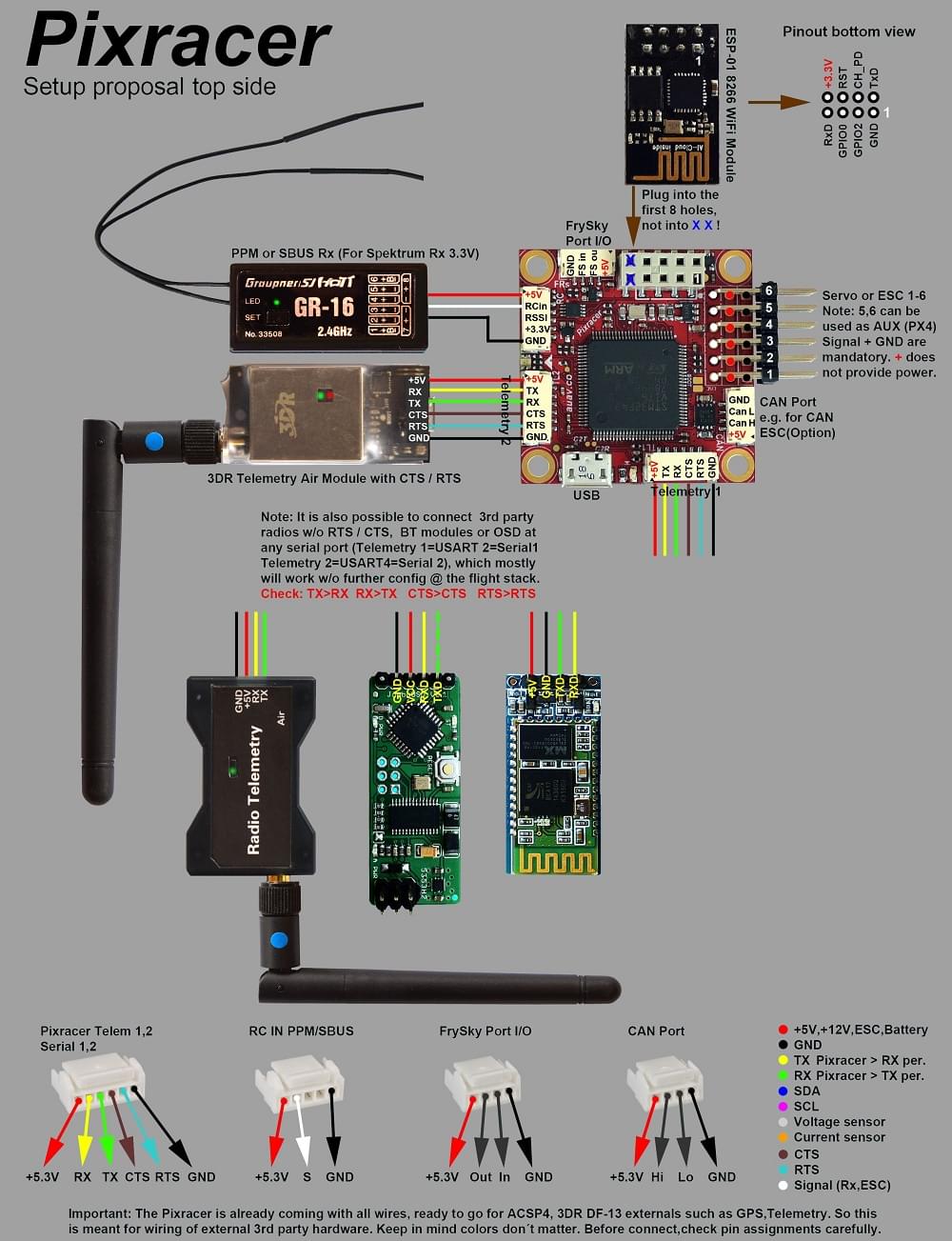
Radio/Remote Control
A remote control (RC) radio system is required if you want to manually control your vehicle (PX4 does not require a radio system for autonomous flight modes).
You will need to select a compatible transmitter/receiver and then bind them so that they communicate (read the instructions that come with your specific transmitter/receiver).
아래의 지침은 다양한 유형의 수신기를 연결하는 방법을 설명합니다:
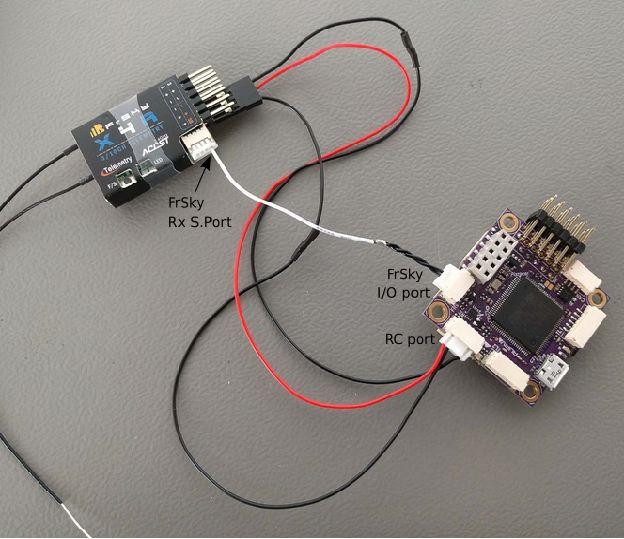
FrSky 수신기는 표시된 포트를 통해 연결되며 제공된 I/O 커넥터를 사용할 수 있습니다.

PPM-SUM과 S.버스 수신기는 RCIN 포트에 연결합니다.
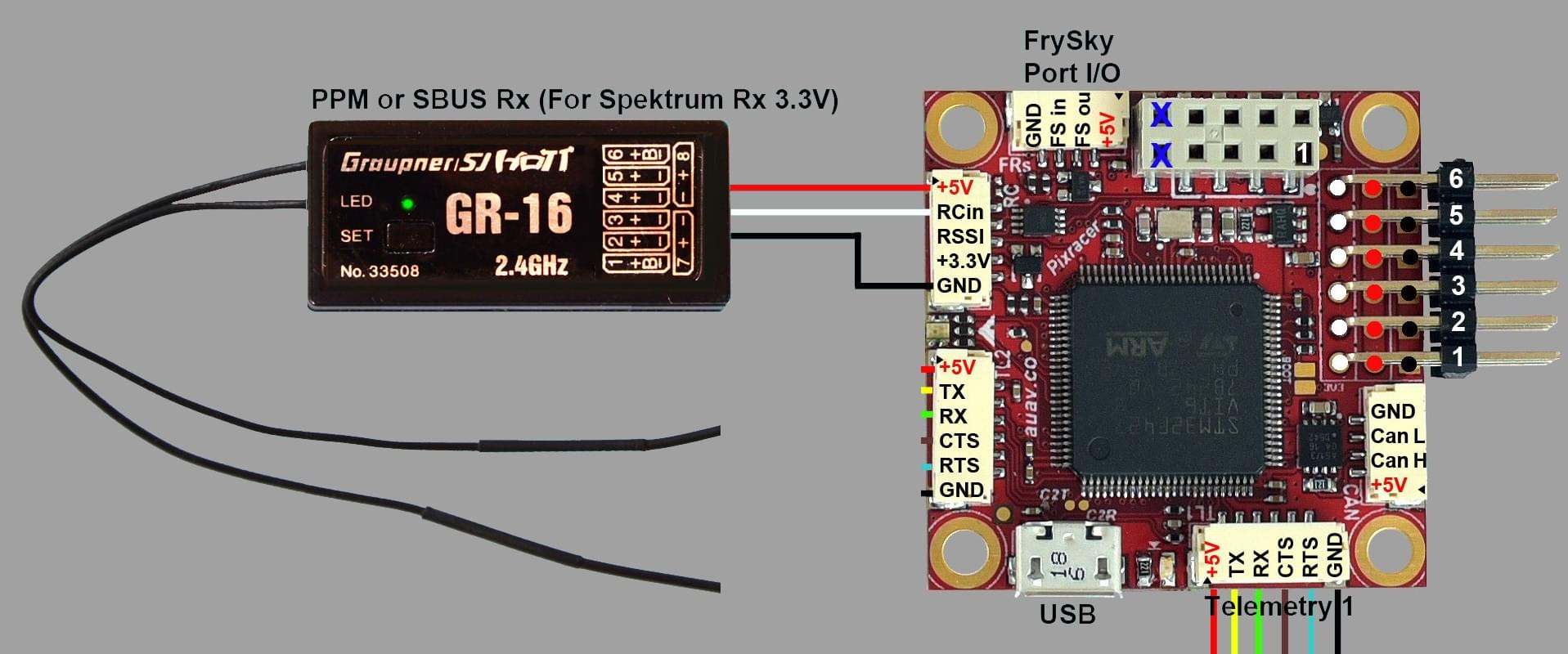
PPM and PWM receivers that have an individual wire for each channel must connect to the RCIN port via a PPM encoder like this one (PPM-Sum receivers use a single signal wire for all channels).
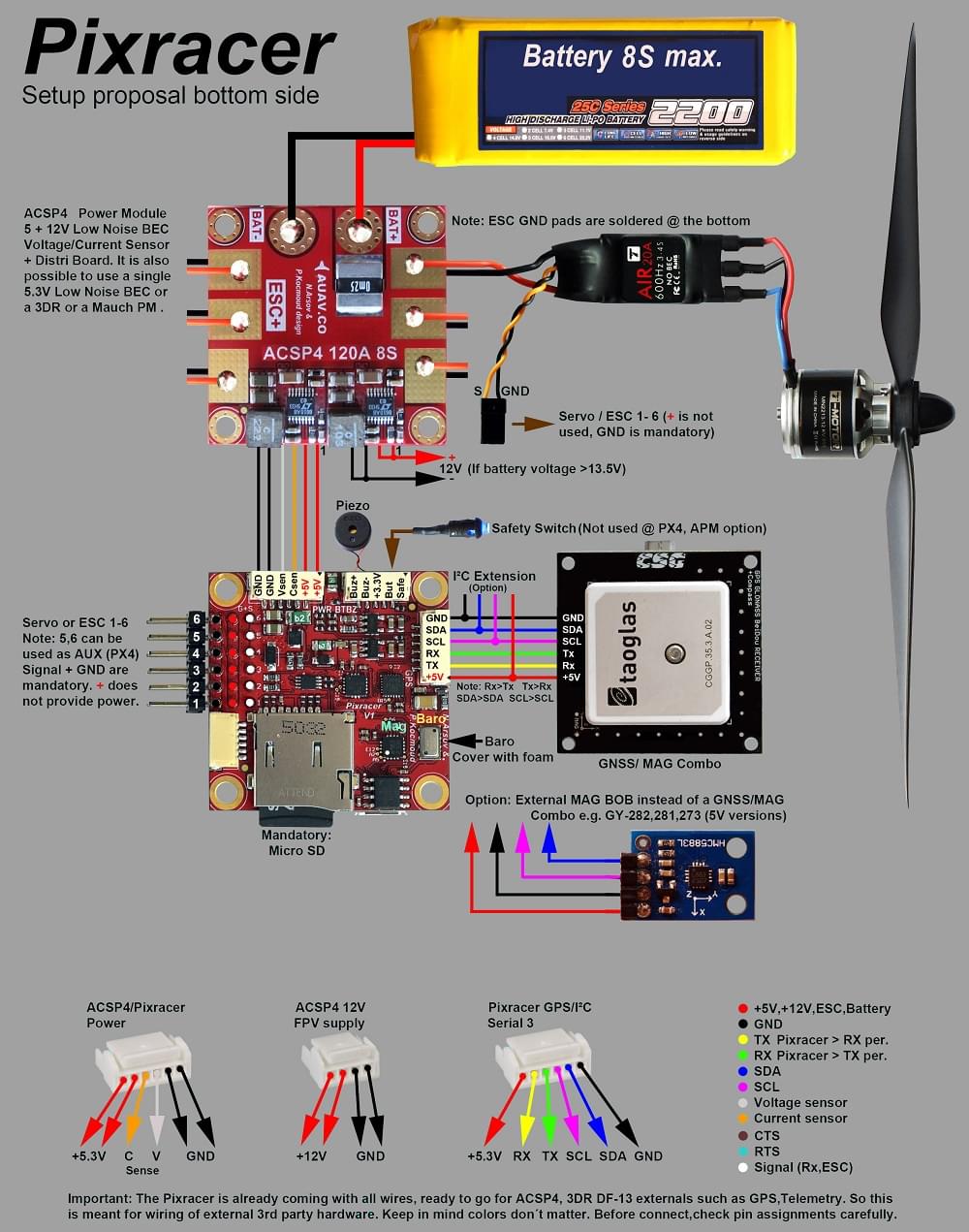
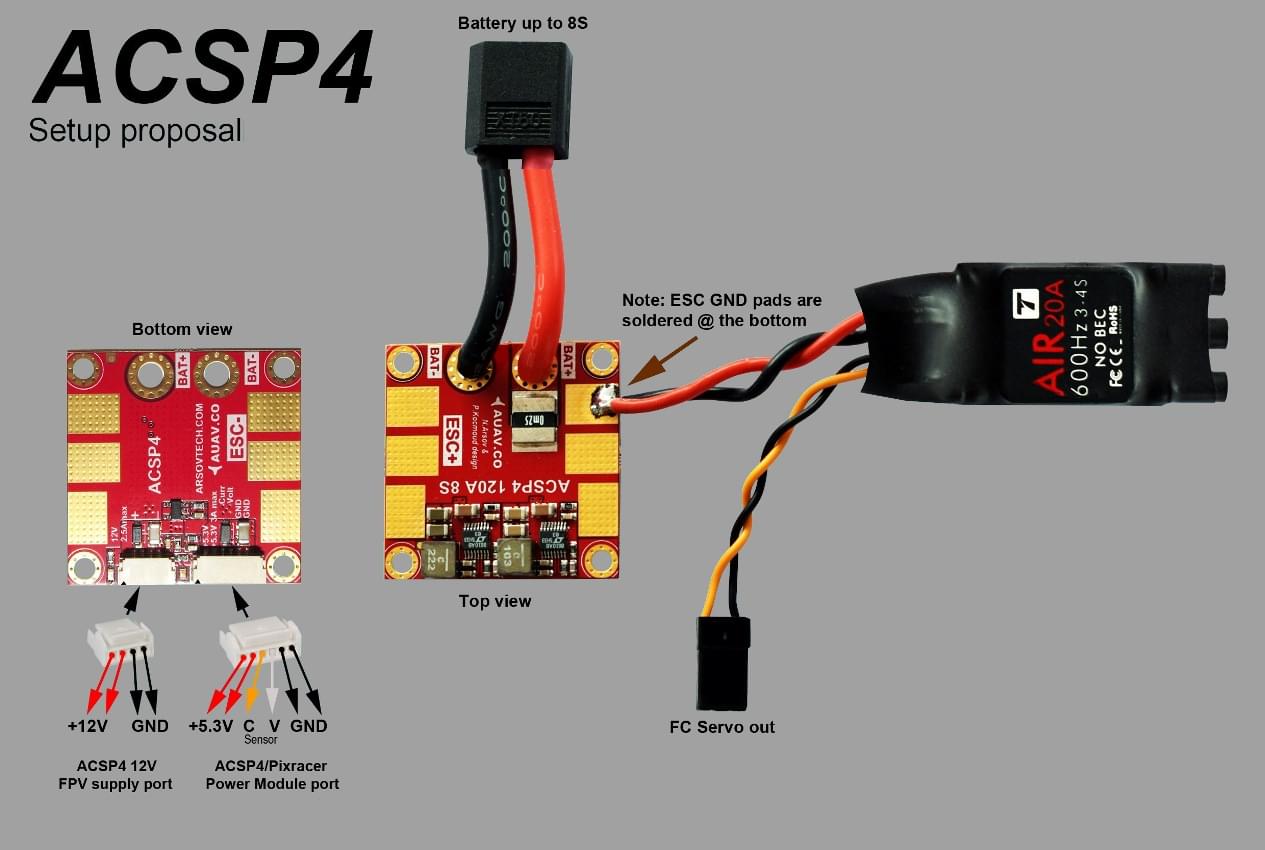
전원 모듈 (ACSP4)
외부 텔레메트리
Pixracer에는 WiFi가 내장되어 있지만 TELEM1 또는 TELEM2 포트에 연결된 외부 Wi-Fi 또는 텔레메트리를 통한 원격 측정도 지원합니다. 무선 다이어그램은 아래의 그림과 같습니다.
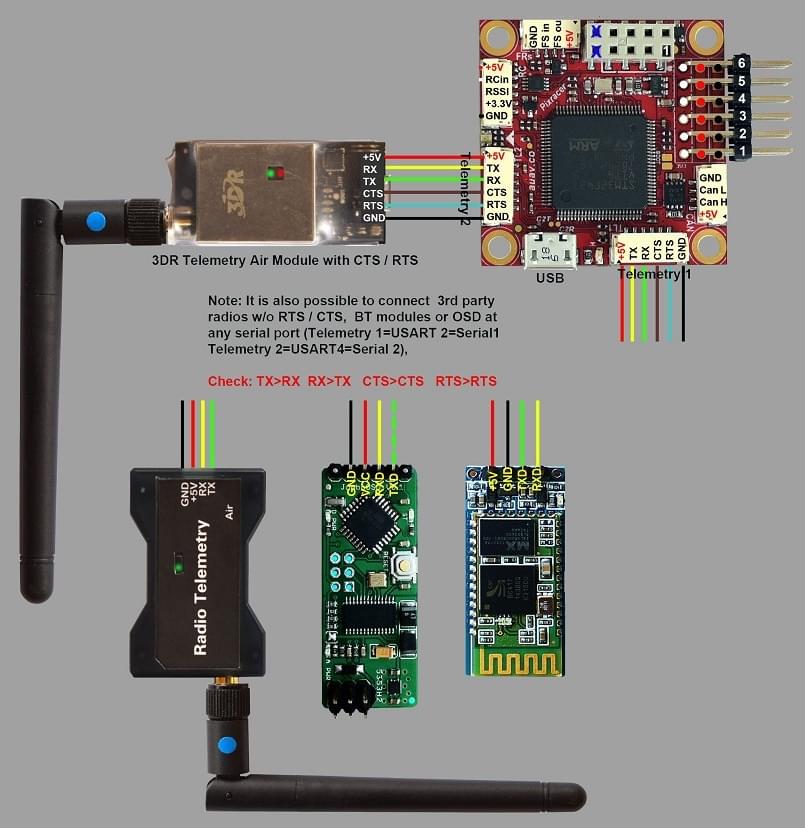
:::note TELEM2 포트는 MAV_2_CONFIG 매개변수를 사용하여 두 번째 MAVLink로 구성하여야 합니다. :::note TELEM2 포트는 MAV_2_CONFIG 매개변수를 사용하여 두 번째 MAVLink로 구성하여야 합니다. :::