Hex Cube Black 비행 컨트롤러
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 제조사에 문의하십시오.
TIP
Cube Orange는이 제품의 후속 제품입니다. 그러나, Pixhawk 표준과 같은 산업 표준에 기반한 제품을 사용하는 것이 바람직합니다. 이 비행 컨트롤러는 표준을 따르지 않으며, 특허받은 커넥터를 사용합니다.
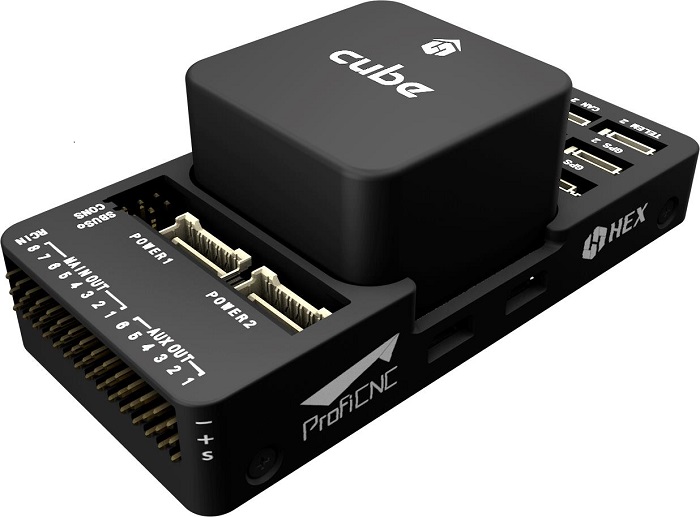
Hex Cube Black 비행 컨트롤러(이전의 Pixhawk 2.1)는 주로 상용 시스템 제조업체를 위한 자동조종장치입니다. Pixhawk-project FMUv3 개방형 하드웨어 설계를 기반으로 NuttX OS에서 PX4를 실행합니다.
배선을 줄이고 신뢰성을 높이며 조립을 쉽게하기 위해 도메인 별 캐리어 보드와 함께 사용하도록 설계되었습니다. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could includes ESCs form the frame of the vehicle.
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
:::note 제조업체 Cube Docs에는 큐브 색상 간의 차이점 뿐만 아니라 자세한 정보를 제공합니다. :::
TIP
이 자동조종장치는 PX4 유지관리 및 테스트 팀에서 지원합니다.
주요 특징
- 32 비트 STM32F427 Cortex-M4F® 코어 (FPU 포함)
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2MB 플래시 (완전 액세스 가능)
- 32 비트 STM32F103 failsafe 코프로세서
- 14 개 PWM/서보 출력(페일세이프 및 수동 오버라이드 포함 8 개, 보조, 고전력 호환 6 개)
- 추가 주변 장치(UART, I2C, CAN) 다양한 연결 옵션
- 전용 프로세서 및 독립형 전원 공급 장치(고정익 적용)로 비행중 복구 및 수동 오버라이드 통합 백업 시스템
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed-wing use)
- 중복 전원공급장치 및 자동 장애 조치
- 외부 안전 스위치
- 다색 LED 주시각 표시기
- 고전력 멀티톤 피에조 오디오 표시기
- 장기간 고속 로깅용 microSD 카드
구매처
Cube Black (ProfiCNC)
조립
사양
프로세서
- 32 비트 STM32F427 Cortex M4 코어 (FPU 포함)
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2MB 플래시 (완전 액세스 가능)
- 32 비트 STM32F103 failsafe 코프로세서
센서
- TBA
인터페이스
- 5x UART (직렬 포트), 1 개의 고전력 지원, 2x (HW 흐름 제어 포함)
- 2x CAN (하나는 내부 3.3V 트랜시버, 하나는 확장 커넥터에 있음)
- Spektrum DSM / DSM2 / DSM-X® Satellite 호환 입력
- Futaba S.BUS® 호환 입력 및 출력
- PPM 합계 신호 입력
- RSSI (PWM 또는 전압) 입력
- I2C
- SPI
- 3.3v ADC 입력
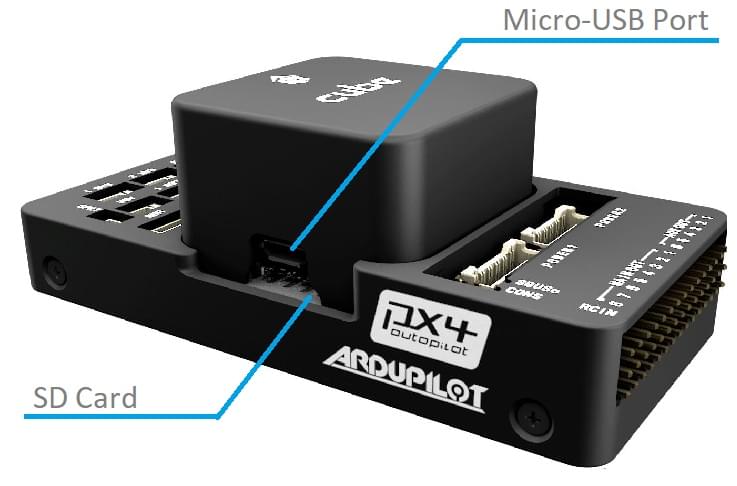
- 내부 microUSB 포트 및 외부 microUSB 포트 확장
전력 시스템 및 보호
- 자동 복구 기능의 이상적인 다이오드 컨트롤러
- ervo 레일 고출력 (최대 10V) 및 고전류 (10A +) 준비
- 모든 주변 장치 출력 과전류 보호, 모든 입력 ESD 보호
정격 전압
Pixhawk 는 3 개의 전원이 공급되는 경우에는 전원 공급 장치의 3중 중복이 가능합니다. 세 개의 레일은 전원 모듈 입력, 서보 레일 입력과 USB 입력입니다.
정상 작동 최대 정격 전압
이러한 조건에서 전원은 아래의 순서대로 시스템에 전원을 공급하여야합니다.
- 전원 모듈 입력 (4.8V ~ 5.4V)
- 서보 레일 입력 (4.8V ~ 5.4V) 수동 오버라이드의 경우 최대 10V이지만 전력 모듈 입력이 없는 경우 자동 조종 장치 부품은 5.7V 이상에서 전원이 꺼집니다.
- USB 전원 입력 (4.8V ~ 5.4V)
절대 최대 정격 전압
아래의 조건에서 시스템은 전원을 사용하지 않지만(작동하지 않음), 그대로 유지됩니다.
- 전원 모듈 입력(4.1V ~ 5.7V, 0V ~ 20V 손상되지 않음)
- 서보 레일 입력(4.1V ~ 5.7V, 0V ~ 20V)
- USB 전원 입력(4.1V ~ 5.7V, 0V ~ 6V)
핀배열과 회로도
보드 설계도와 문서는 The Cube Project를 참고하십시오.
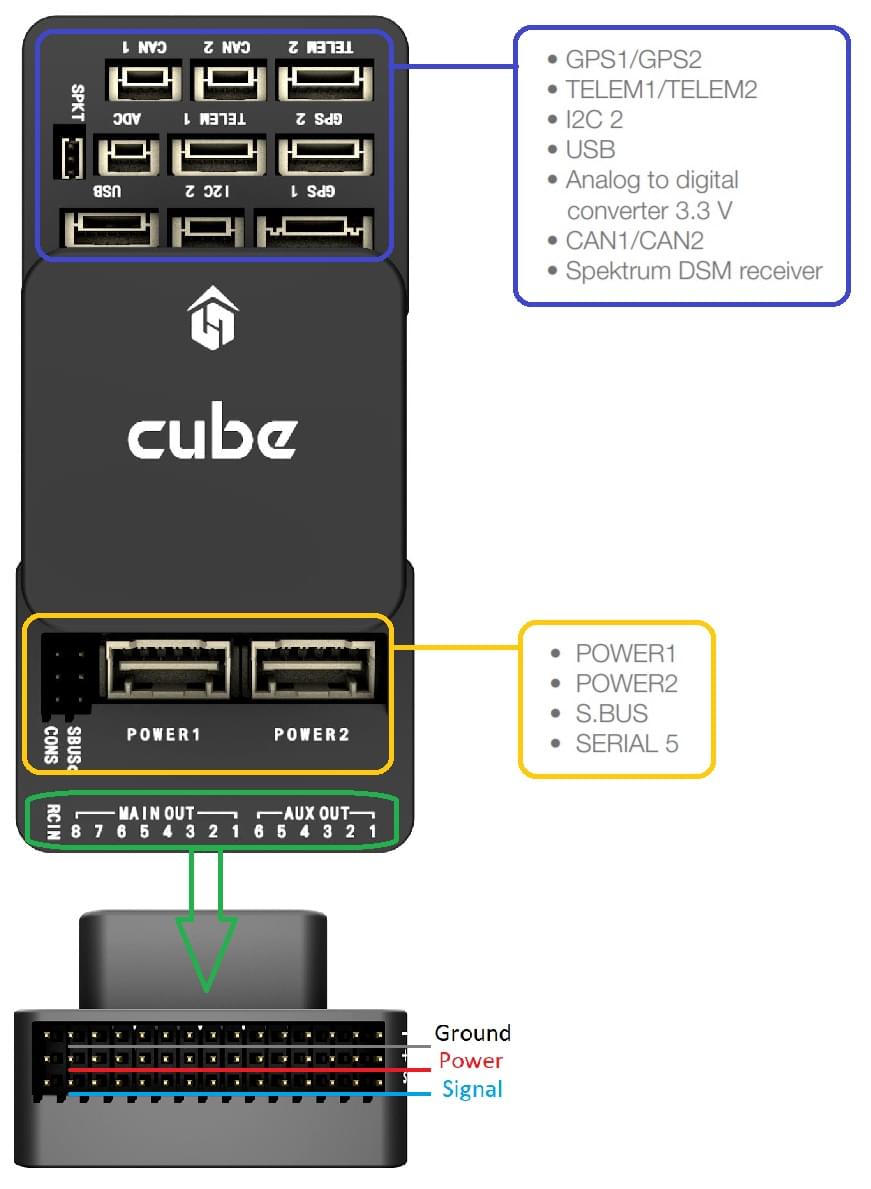
포트
위쪽 (GPS, TELEM 등)
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | 콘솔 |
| UART8 | /dev/ttyS6 |
디버그 포트

USB/SDCard 포트
펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
:::
이 대상에 대한 PX4 빌드 :
make px4_fmu-v3_default이슈
Cube Black의 CAN1과 CAN2의 실크 스크린이 뒤집힙니다 (CAN1은 CAN2이고 그 반대의 경우도 마찬가지임).
추가 정보 및 문서
- Cube 배선 퀵 스타트
- Cube 문서 (제조사) :