CUAV v5 (단종)
DiscontinuedWARNING
This flight controller has been discontinued and is no longer commercially available.
PX4 does not manufacture this (or any) autopilot. 이 보드는 Pixhawk 프로젝트 FMUv5 개방형 하드웨어 설계에 기반합니다. NuttX OS에서 PX4를 실행하며, PX4 펌웨어와 호환됩니다.
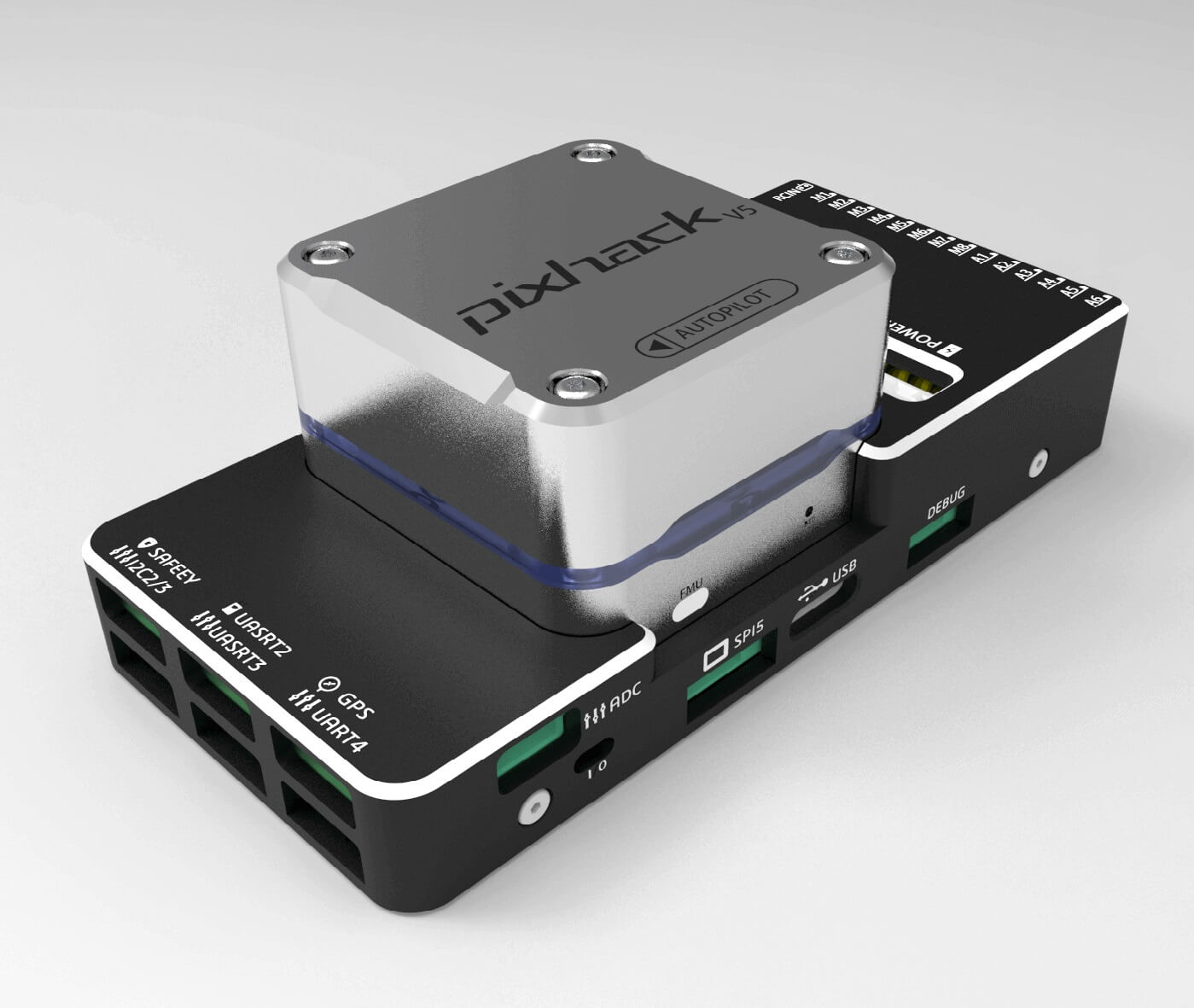
CUAV v5® (previously "Pixhack v5") is an advanced autopilot designed and made by CUAV®. The board is based on the Pixhawk-project FMUv5 open hardware design. It runs PX4 on the NuttX OS, and is fully compatible with PX4 firmware. It is intended primarily for academic and commercial developers.
요약
메인 FMU 프로세서: STM32F765
- 32 비트 Arm® Cortex®-M7, 216MHz, 2MB 메모리, 512KB RAM
IO 프로세서: STM32F100
- 32 비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
내장 센서 :
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : BMI055
- 자력계 : IST8310
- 기압계: MS5611
인터페이스:
- PWM 출력 8-14개(IO 6개, FMU 8개)
- FMU의 전용 PWM/캡처 입력 3 개
- CPPM 전용 RC 입력
- PPM 및 S.Bus 전용 RC 입력
- 아날로그/PWM RSSI 입력
- PWM Servo 출력
- 범용 시리얼 포트 5개
- I2C 포트 4개
- SPI 버스 4개
- 2 CANBuses with serial ESC
- 배터리 2 개의 전압 및 전류에 대한 아날로그 입력
전원 시스템 :
- 전원: 4.3~5.4V
- USB 입력: 4.75~5.25V
- 서보 전원 입력: 0~36V
중량 및 크기:
- 중량: 90g
- 크기: 44x84x12mm
기타 특징:
- 작동 온도: -20 ~ 80°c (측정치)
Where to Buy
Order from CUAV.
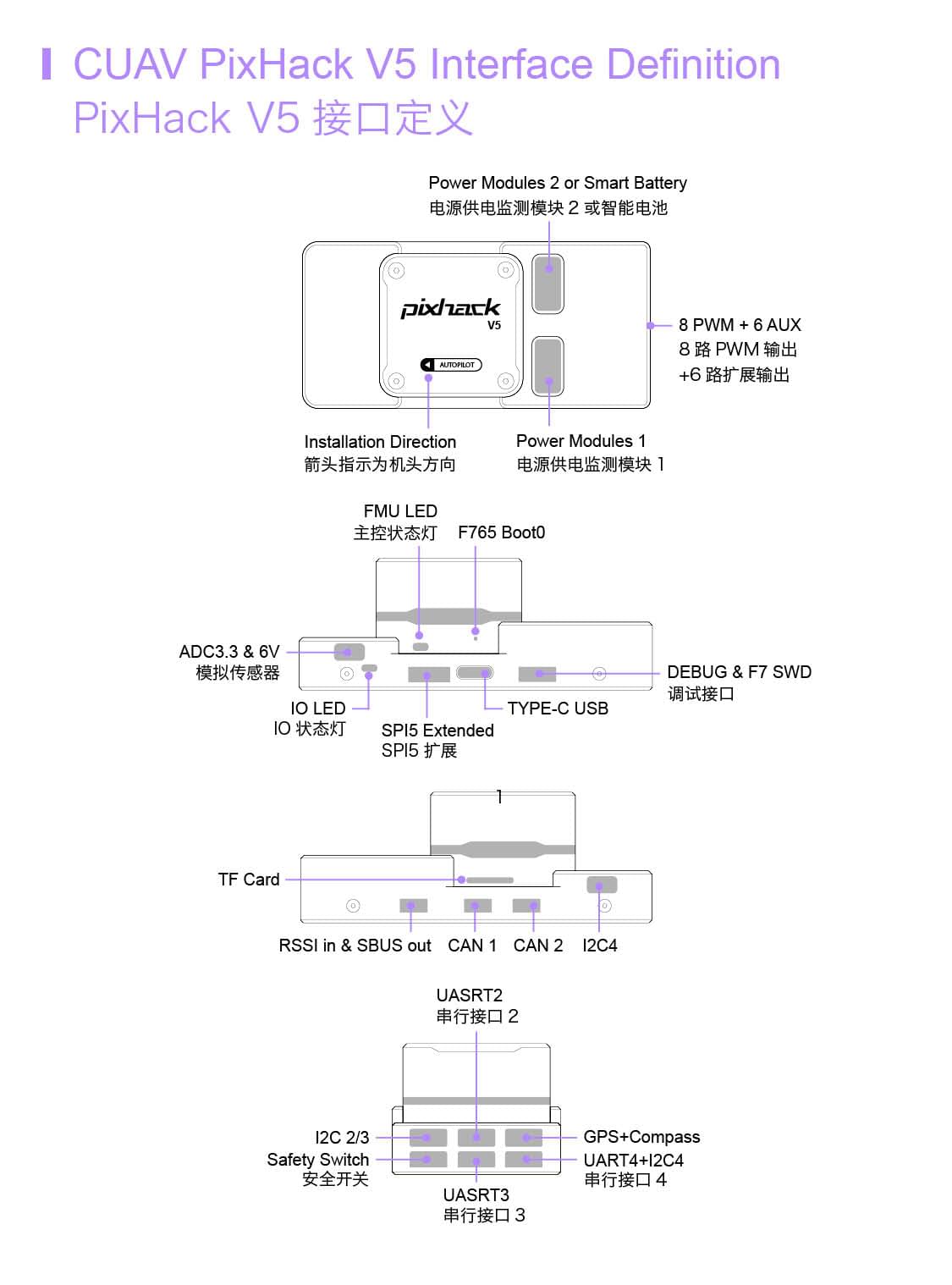
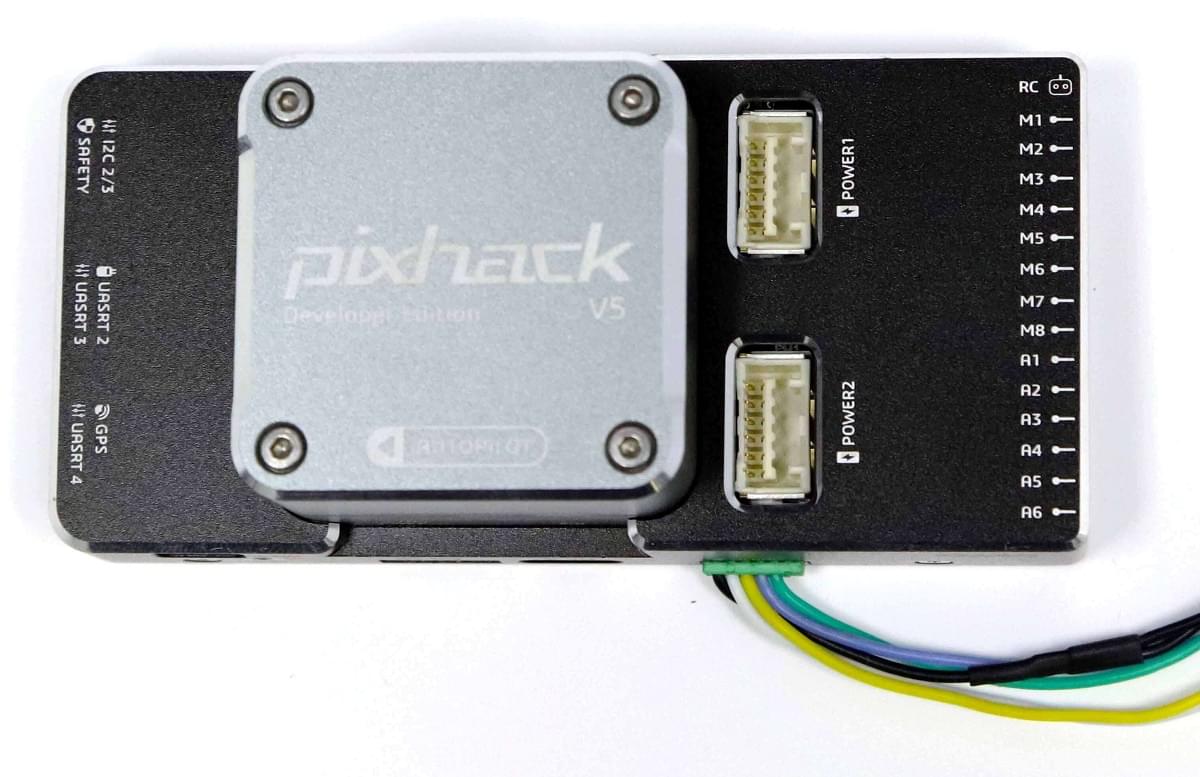
연결
WARNING
The RCIN interface is limited to powering the rc receiver and cannot be connected to any power/load. 이 세개의 파워 레일은: POWER1, POWER2 그리고 USB 입니다.
정격 전압
:::note 출력 전원 레일인 FMU PWM OUT과 I/O PWM OUT (0V to 36V) 은 비행제어보드에 전원을 공급하지 않습니다.(공급받지도 않습니다). POWER1, POWER2 또는 USB중 하나에서 전원을 공급하여야 합니다.
The output power rails FMU PWM OUT and I/O PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWER1, POWER2 or USB or the board will be unpowered.
Normal Operation Maximum Ratings
Under these conditions all power sources will be used in this order to power the system:
- POWER1과 POWER2 입력 (4.3V ~ 5.4V)
- USB 입력 (4.75V ~ 5.25V)
펌웨어 빌드
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v5_default디버그 포트
The PX4 System Console and SWD interface operate on the FMU Debug port. Simply connect the FTDI cable to the Debug & F7 SWD connector. To access the I/O Debug port, the user must remove the CUAV v5 shell. Both ports have standard serial pins and can be connected to a standard FTDI cable (3.3V, but 5V tolerant).
The pinout is as shown.
| 핀 | CUAV v5 디버그 |
|---|---|
| 1 | GND |
| 2 | FMU-SWCLK |
| 3 | FMU-SWDIO |
| 4 | UART7_RX |
| 5 | UART7_TX |
| 6 | VCC |
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX는 SBUS_RC 커넥터의 RC 입력입니다. |
| UART7 | /dev/ttyS5 | 디버깅 콘솔 |
| UART8 | /dev/ttyS6 | PX4IO |
주변 장치
지원 플랫폼 및 기체
Any multicopter / airplane / rover or boat that can be controlled with normal RC servos or Futaba S-Bus servos. The complete set of supported configurations can be seen in the Airframes Reference.