CUAV V5 nano 배선 빠른 시작
PX4에서는 이 자동 항법 장치를 제조하지 않습니다. 하드웨어 지원이나 호환 문제는 제조사에 문의하십시오.
이 설명서는 CUAV V5 nano 비행 콘트롤러의 전원 공급 방법과 주요 주변 장치 연결 방법을 설명합니다.
배선 개요
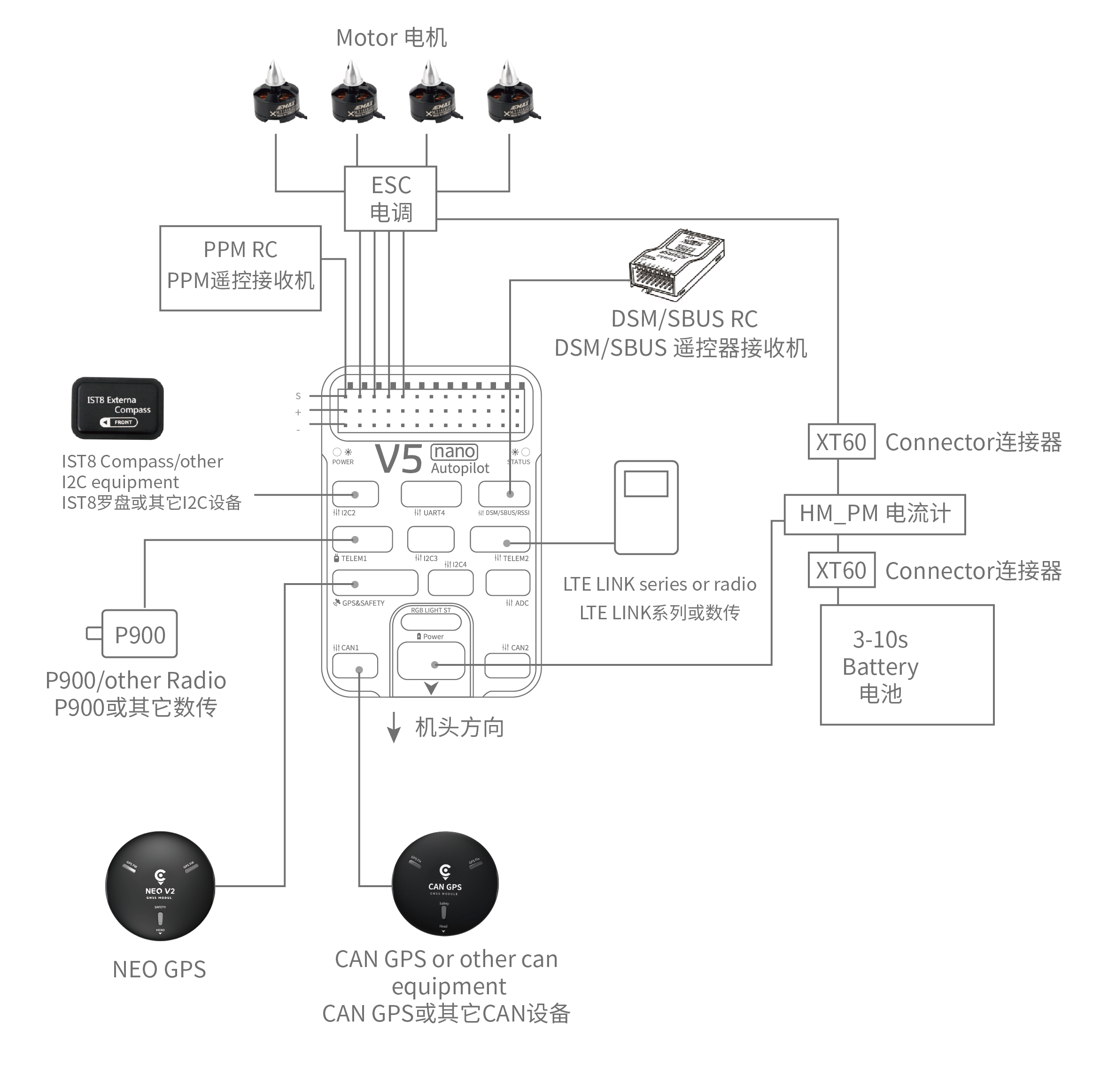
아래의 이미지는 주요 센서와 주변 장치(모터 및 서보 출력 제외)들의 연결 방법을 설명합니다. 다음 섹션에서 각 장치에 대하여 자세히 설명합니다.
| 인터페이스 | 기능 |
|---|---|
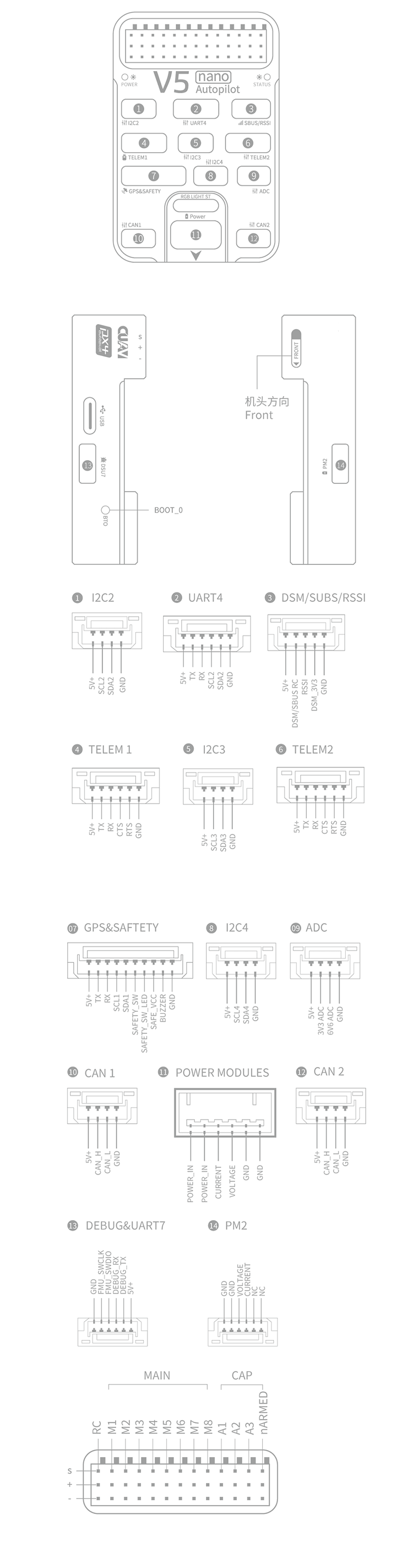
| 전원 | 전원 모듈을 연결하십시오. 전력 및 ANALOG 전압 및 전류 측정을 제공합니다. |
| PM2 | PX4와 함께 사용하지 마십시오. |
| TF CARD | 로그 저장용 SD 카드 (카드와 함께 제공) |
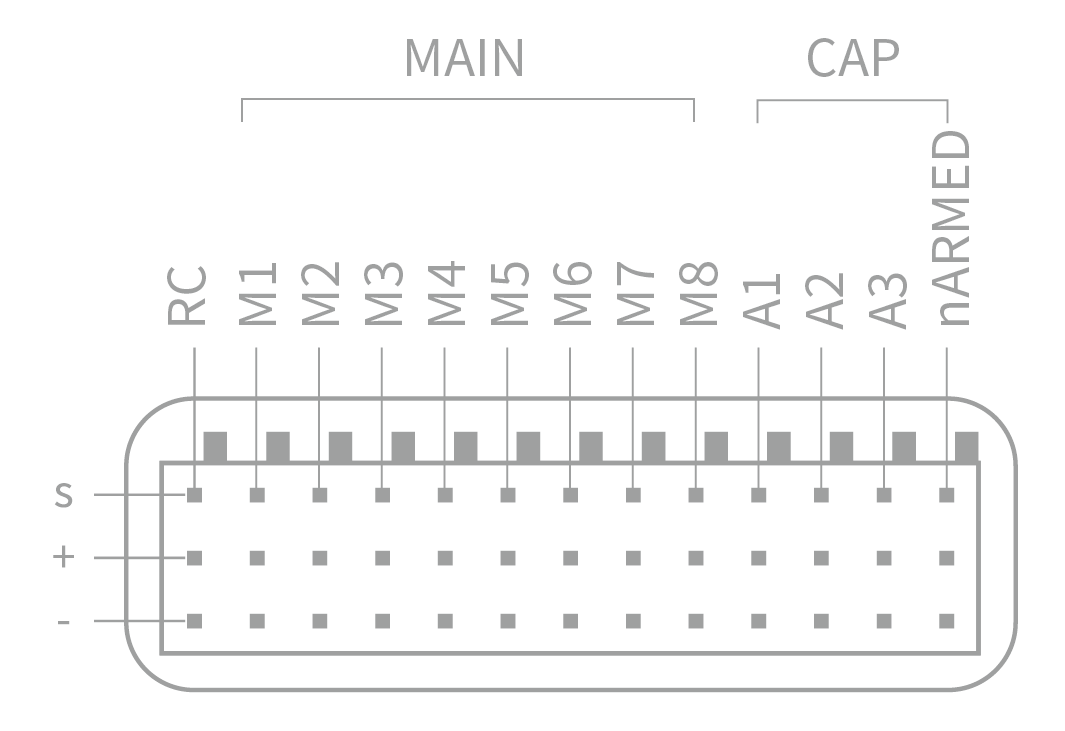
| M1~M8 | PWM 출력 모터와 서보를 콘트롤 합니다. |
| A1~A3 | Capture pins (not currently supported on PX4). |
| nARMED | FMU 시동 상태를 나타냅니다. 액티브 로우 (시동시 낮음)입니다. |
| DSU7 | FMU 디버그에 사용되며 디버그 정보를 획득합니다. |
| I2C2/I2C3/I2C4 | 외부 나침반과 같은 I2C 장치를 연결합니다. |
| CAN1/CAN2 | CAN GPS와 같은 UAVCAN 장치를 연결합니다. |
| TYPE-C(USB) | 펌웨어 업로드 등의 작업시에 비행 콘트롤러와 컴퓨터를 연결합니다. |
| GPS & SAFETY | GPS, 안전 스위치 및 부저가 포함된 Neo GPS에 연결합니다. |
| TELEM1/TELEM2 | 텔레메트리에 연결합니다. |
| DSM/SBUS/RSSI | DSM, SBUS, RSSI 신호 입력 인터페이스, DSM 인터페이스는 DSM 위성 수신기에 연결 가능, SBUS 인터페이스는 SBUS 원격 제어 수신기에 연결 가능, 신호 강도 반환 모듈용 RSSI 포함. |
:::note 자세한 인터페이스는 V5 nano 매뉴얼을 참고하십시오. :::
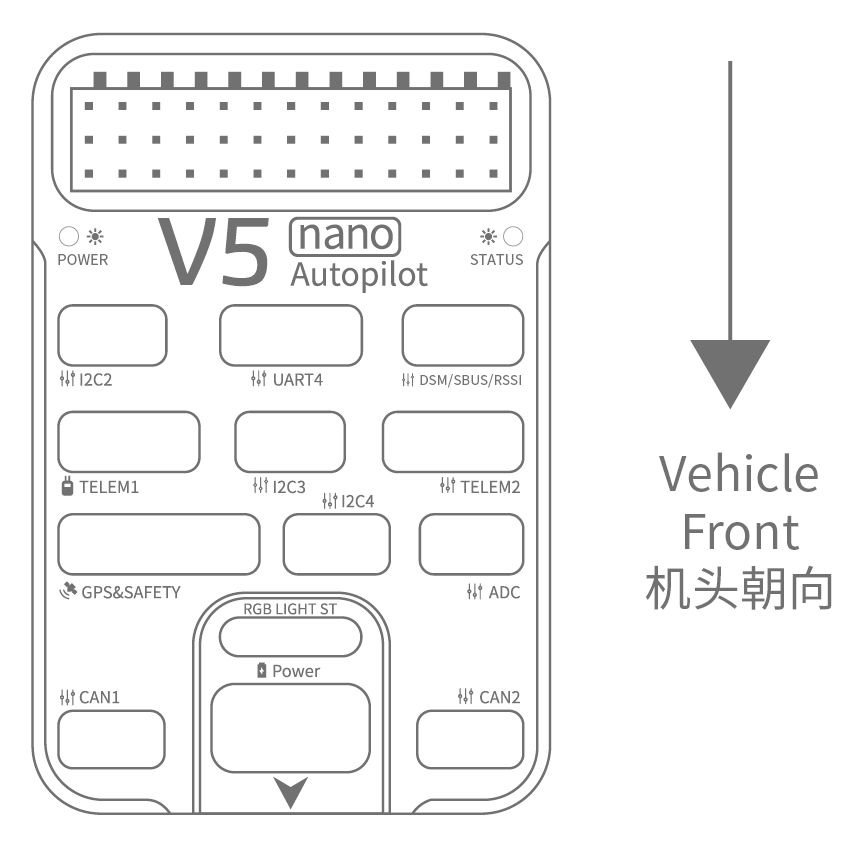
If the controller cannot be mounted in the recommended/default orientation (e.g. due to space constraints) you will need to configure the autopilot software with the orientation that you actually used: Flight Controller Orientation.
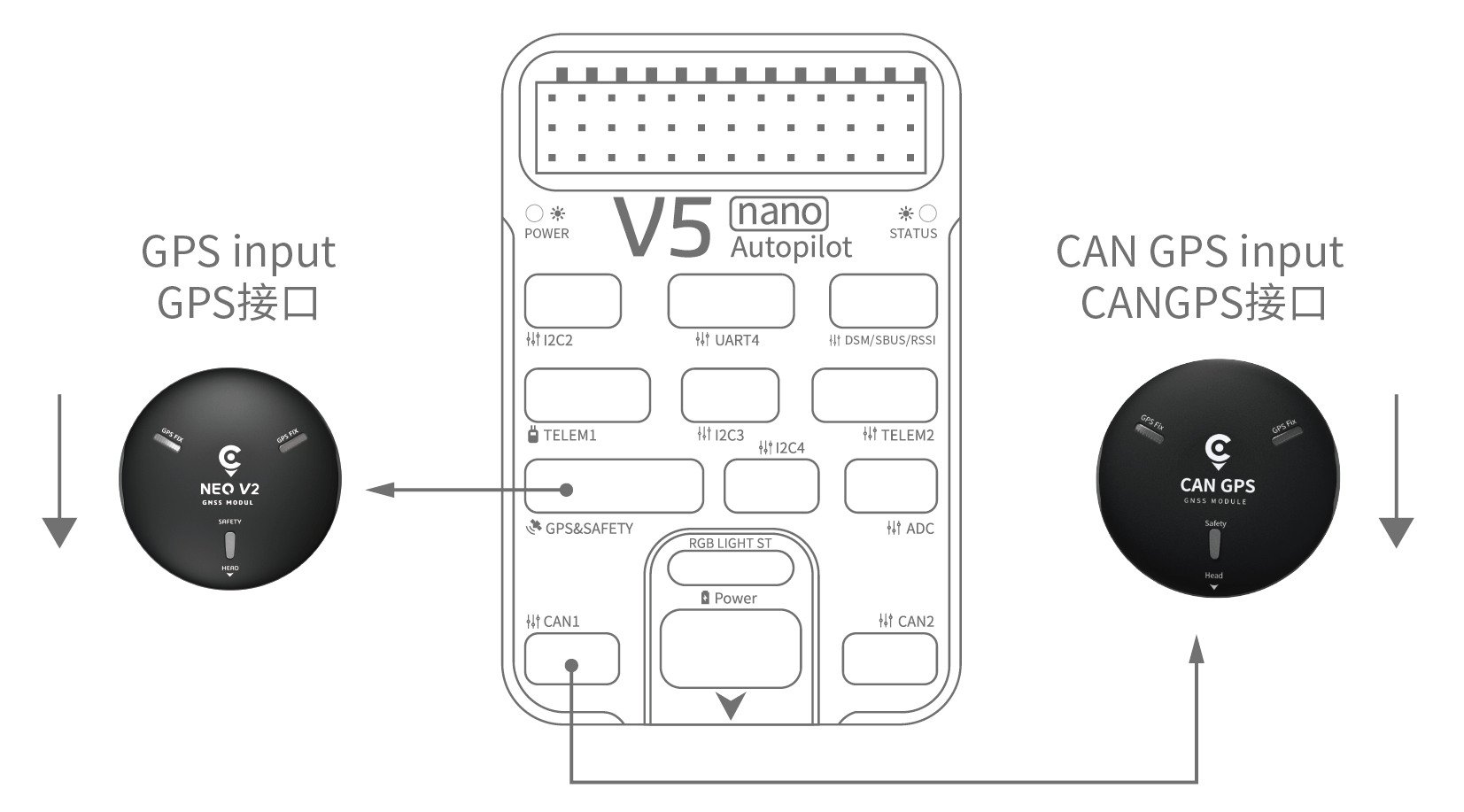
GPS + 나침반 + 안전 스위치 + LED
The recommended GPS module is the Neo v2 GPS, which contains GPS, compass, safety switch, buzzer, LED status light.
:::note 다른 GPS 모듈은 작동하지 않을 수 있습니다 (호환성 문제 참조). :::
The GPS/Compass module should be mounted on the frame as far away from other electronics as possible, with the direction marker towards the front of the vehicle (Neo GPS arrow is in the same direction as the flight control arrow). 케이블을 사용하여 비행 제어 GPS에 연결합니다.
:::note CAN GPS를 사용하는 경우 케이블을 사용하여 비행 제어 CAN 인터페이스에 연결하십시오. :::
안전 스위치
The dedicated safety switch that comes with the V5+ is only required if you are not using the recommended Neo v2 GPS (which has an inbuilt safety switch).
GPS 없이 비행시에는 차량 시동 스위치를 GPS1 포트에 직접 연결하여야합니다 (이전 6 핀 GPS를 사용하는 경우에는, 라인 변경에 관련된 하단 인터페이스 매뉴얼을 참고하십시오).
부저
If you do not use the recommended Neo v2 GPS the buzzer may not work.
무선 조종
차량을 수동 제어에는 무선 조종기가 필요합니다. PX4의 자율 비행은 무선조종기가 필수 사항은 아닙니다. 기체와 조종자가 통신하기 위하여 송신기와 수신기를 바인딩하여야 합니다. 송신기와 수신기의 매뉴얼을 참고하십시오.
아래 그림은 원격 수신기에 액세스하는 방법을 보여줍니다 (키트에서 S.BUS 케이블을 찾으십시오)
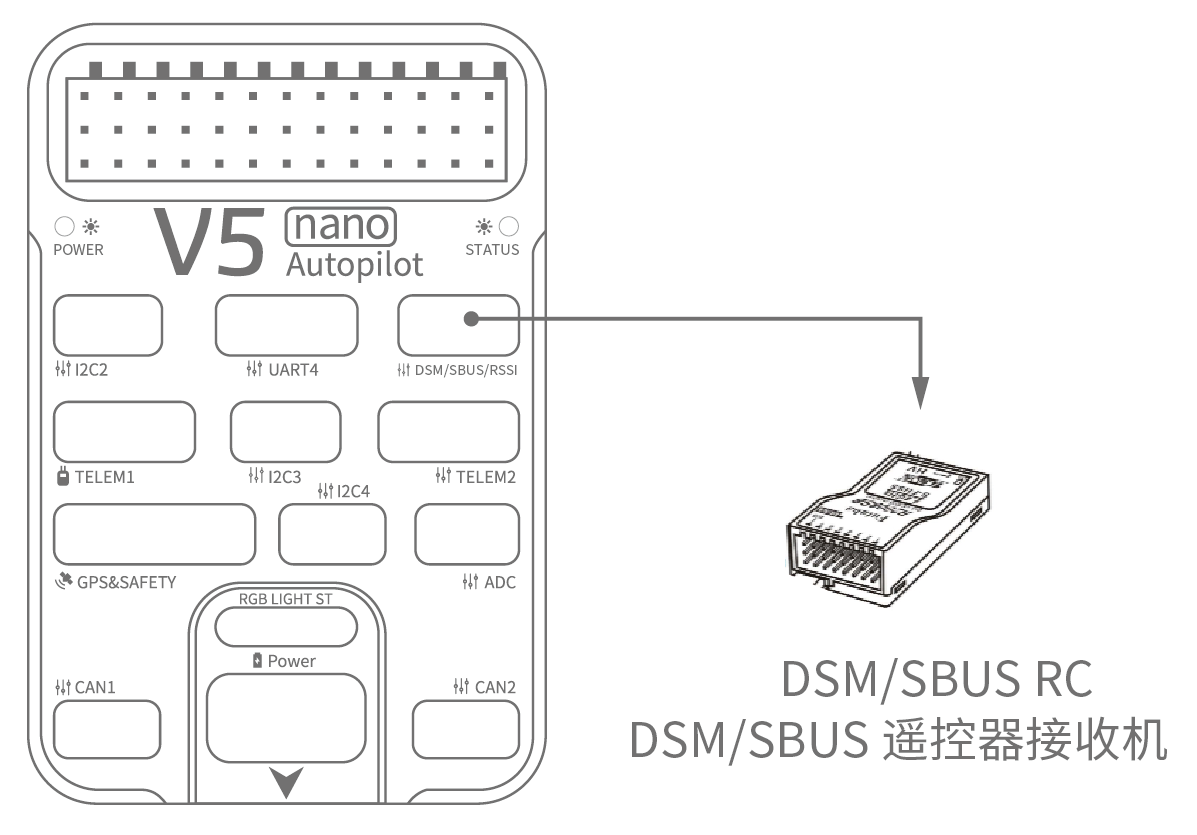
Spektrum Satellite 수신기
V5 nano에는 전용 DSM 케이블이 있습니다. Spektrum 위성 수신기는 비행 컨트롤러 DSM/SBUS/RSSI 인터페이스에 연결하여야합니다.
전원
The v5 nano kit includes the HV_PM module, which supports 2~14S LiPo batteries. Connect the 6pin connector of the HW_PM module to the flight control Power interface.
WARNING
제공된 전원 모듈은 퓨즈가 없습니다. 주변 장치를 연결하는 동안 전원을 반드시 꺼야 합니다.
:::note 전원 모듈은 PWM 출력에 연결된 주변 장치에 전원 자체를 공급하지 않습니다. 서보/액추에이터를 연결하는 경우에는 BEC를 사용하여 별도로 전원을 공급하여야 합니다. :::
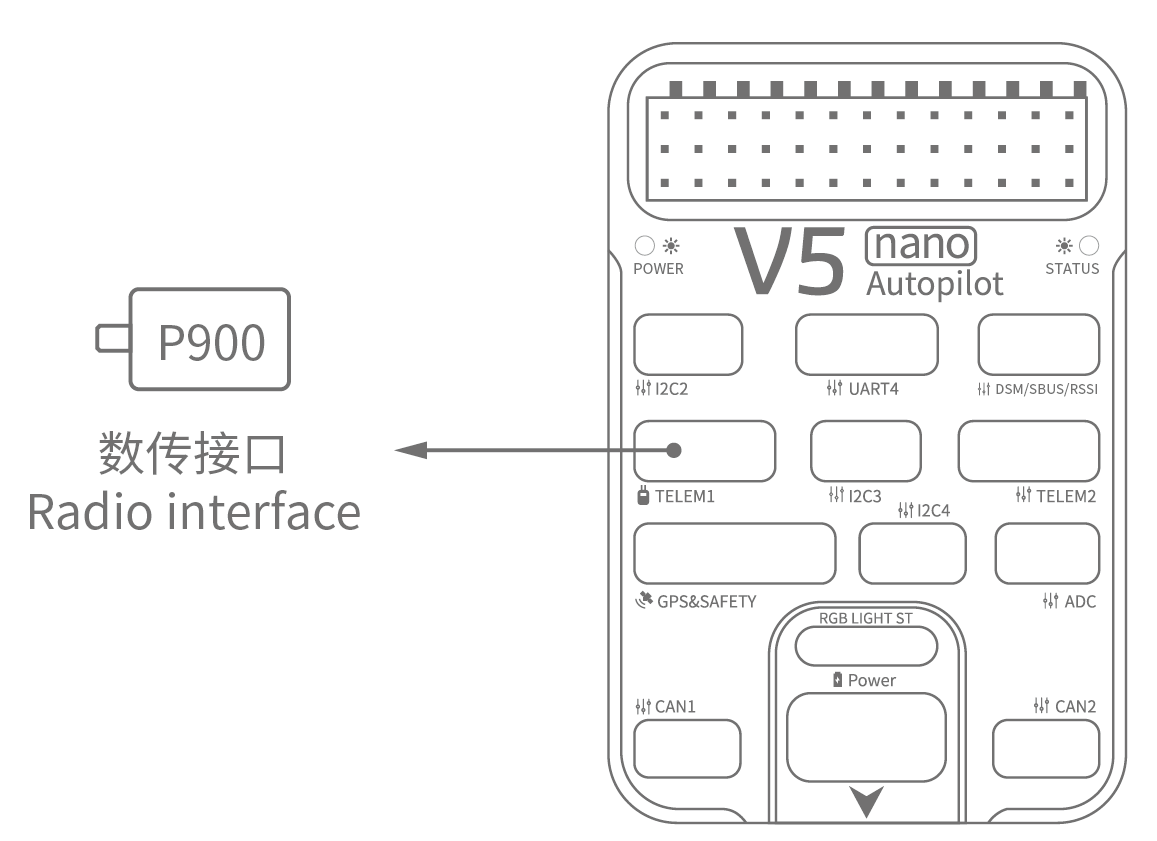
텔레메트리(선택 사항)
지상국에서는 텔레메트리를 사용하여 기체를 통신, 모니터링, 제어 합니다. 기체를 특정 위치로 움직이도록 지시하거나, 새로운 임무를 업로드할 수 있습니다.
통신 채널은 텔레메트리를 통하여 이루어집니다. 차량 기반 라디오는 TELEM1 또는 TELEM2 포트에 연결합니다. 이 포트에 연결되어있는 경우에는 추가 설정이 필요하지 않습니다. 다른 라디오는 지상국 컴퓨터 또는 모바일 장치에 USB를 통하여 연결합니다.
SD 카드(선택 사항)
An SD card is inserted in the factory (you do not need to do anything).
모터
모터/서보는 기체 규격에 지정된 순서대로 MAIN 및 AUX 포트에 연결됩니다.
핀배열