오프보드 제어
WARNING
오프보드 제어는 위험합니다. 오프보드 비행전에 적절한 준비, 테스트 및 안전 예방 조치를 취하여야 합니다.
오프보드 제어의 아이디어는 자동조종장치 외부에서 실행되는 소프트웨어를 사용하여 PX4를 제어하는 것입니다. 이것은 MAVLink 프로토콜, 특히 SET_POSITION_TARGET_LOCAL_NED 및 SET_ATTITUDE_TARGET 메시지를 통하여 수행됩니다.
오프보드 제어 펌웨어 설정
오프보드 개발전에 펌웨어에서 두 가지를 설정하여야 합니다.
RC 스위치를 오프보드 모드 활성화에 매핑
QGroundControl에서 매개변수를 로드하고, 오프보드 모드를 활성화 RC 채널을 할당할 수 있는 RC_MAP_OFFB_SW 매개변수를 검색합니다. 오프보드 모드에서 벗어날 때 위치 제어로 이동하는 방식으로 매핑하는 것이 유용할 수 있습니다.
MAVLink 메시지로 오프보드 모드를 활성화할 수 있으므로, 이 단계는 필수는 아닙니다. 이 방법이 훨씬 더 안전합니다.
보조 컴퓨터 인터페이스 활성화
Enable MAVLink on the serial port that you connect to the companion computer (see Companion Computers).
하드웨어 설정
일반적으로 오프보드 통신을 설정하는 방법에는 세 가지가 있습니다.
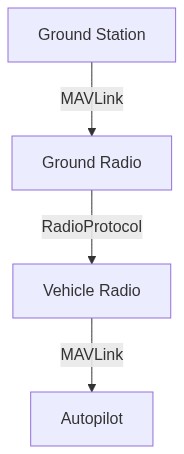
직렬 라디오
하나는 자동조종장치의 UART 포트에 연결합니다.
One connected to a ground station computer
Example radios include:
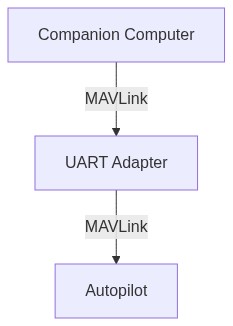
온보드 프로세서
A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ehthernet port. There are many possibilities here and it will depend on what kind of additional on-board processing you want to do in addition to sending commands to the autopilot. Some examples are provided in Companion Computers.
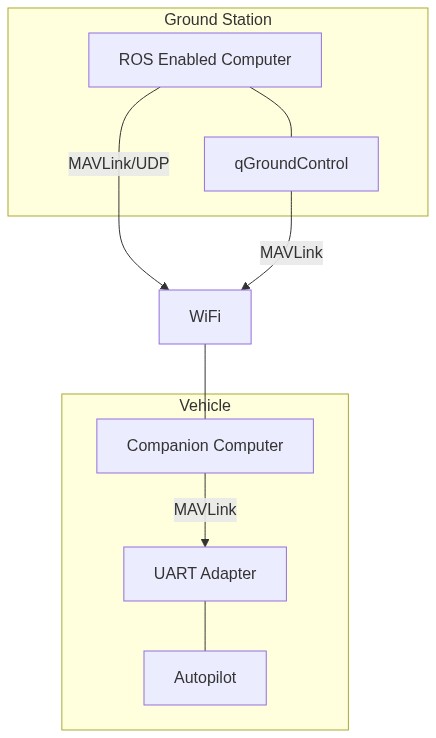
온보드 프로세서 및 ROS에 대한 Wi-Fi 링크(권장)
A small computer mounted onto the vehicle connected to the autopilot through a UART to USB adapter while also having a WiFi link to a ground station running ROS. This can be any of the computers from the above section coupled with a WiFi adapter.