Flight Review를 이용한 로그 분석
Flight Review 는 기체 상태 점검에 사용할 수 있습니다.
그래프 자체는 어렵지 않지만, 허용 범위와 적절한 그래프 모양을 파악하기 위해서는 약간의 경험이 필요합니다. 이 페이지에서는 그래프를 해석하고 문제점을 식별하는 방법을 설명합니다.
일반적인 사용법
그래프에 공통적인 기능 :
- 그래프의 배경색은 기록 중 비행 모드를 나타내는 데 사용됩니다 (그래프는 모드에 따라 다름).
- 비행 모드 : 그래프 본문의 배경색은 비행 모드를 나타냅니다. 그래프 위로 마우스를 가져 가면 비행 모드 레이블이 표시됩니다.
- VTOL flight mode: VTOL vehicles additionally show the VTOL mode as background colour in the bottom part of the plot (blue for multicopter, yellow for fixed-wing, and red for transition).
- 특정 그래프 축을 마우스로 스크롤 하면 해당 축이 확대됩니다 (수평 또는 수직).
- 그래프 내에서 마우스를 스크롤 하면 두 축이 모두 확대됩니다.
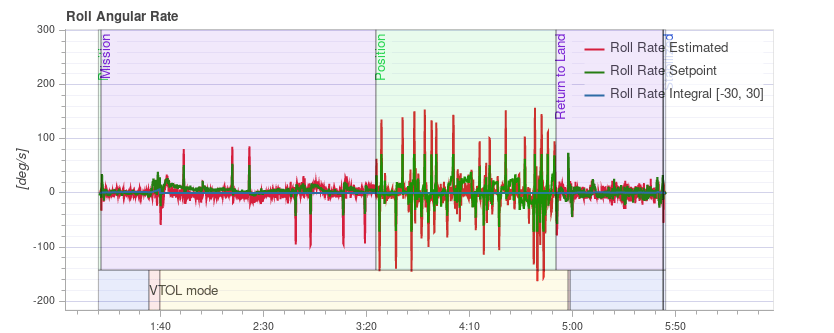
PID 추적 성능
비행 모드에 따라 비행 컨트롤러는 위치, 속도, 고도 또는 속도 설정 값을 추적할 수 있습니다 (추적된 설정 값은 모드에 따라 다릅니다. 예 : 안정화 모드에서는 속도 설정 값이 없음).
예상 라인 (빨간색)은 설정 값 (녹색)과 거의 일치하여야 합니다. 그렇지 않은 경우 대부분의 경우 해당 컨트롤러의 PID 게인을 조정해야합니다.
멀티콥터 PID 튜닝 가이드에는 추적 성능 분석에 대한 예제 플롯과 정보가 포함되어 있습니다.
TIP
특히 속도 컨트롤러의 경우 확대 할 때 더 자세한 정보를 얻으려면 고속 로깅 프로필 (SDLOG_PROFILE)을 활성화하는 것이 유용합니다.
진동
진동은 멀티콥터의 가장 일반적인 문제중 하나입니다. 높은 진동은 아래의 결과들을 초래할 수 있습니다.
- 비효율적인 비행과 비행 시간 감소
- 모터가 가열될 수 있습니다.
- 재료들의 마모 증가
- 기체을 단단히 고정할 수 없어, 비행 성능이 저하됩니다.
- 센서 클리핑
- 위치 추정 실패로 인하여 잠재적으로 오비행이 발생할 수 있습니다.
따라서 진동 수준을 주시하고 필요한 경우 설정을 개선하여야 합니다.
진동이 너무 높은 시점이 있으며, 일반적으로 진동은 낮을수록 좋습니다. 그러나 '모든 것이 정상'과 '레벨이 너무 높습니다' 사이에는 넓은 범위가 있습니다. 이 범위는 기체 크기를 포함한 여러 요인에 따라 달라집니다. 대형 기체는 더 높은 관성을 갖고 더 많은 소프트웨어 필터링을 허용합니다 (동시에 대형 차량의 진동은 더 낮은 주파수임).
다음 섹션에서는 진동 수준을 확인에 사용할 그래프와 분석 방법을 설명합니다.
TIP
진동을 분석시에는 여러 차트를 살펴 보는 것이 좋습니다 (다른 차트가 일부 문제를 더 잘 강조할 수 있음).
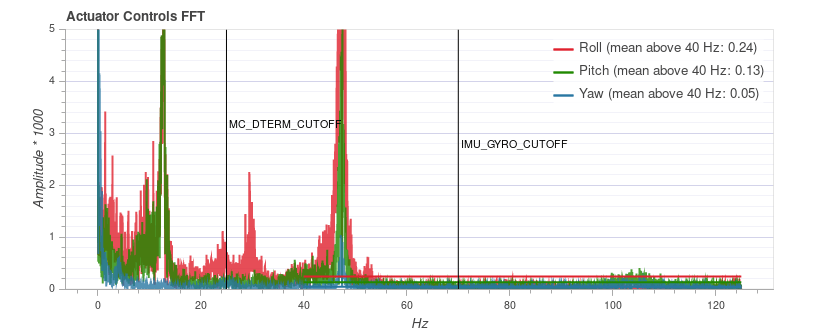
액추에이터 FFT 제어
You need to enable the high-rate logging profile (SDLOG_PROFILE) to see this plot.
이 그래프는 액추에이터 제어 신호 (속도 컨트롤러의 PID 출력)를 기반으로 롤, 피치 및 요 축에 대한 주파수 플롯을 보여줍니다. 주파수 피크를 식별하고 소프트웨어 필터를 구성하는 데 도움이됩니다. 가장 낮은 끝 (약 20Hz 미만)에는 단일 피크 만 있어야하며 나머지는 낮고 평평하여야 합니다.
y 축 스케일링은 기체마다 다르지만, 동일한 기체의 로그를 서로 직접 비교할 수 있습니다.
예: 양호한 진동
QAV-R 5 "Racer 프레임 (양호한 진동).
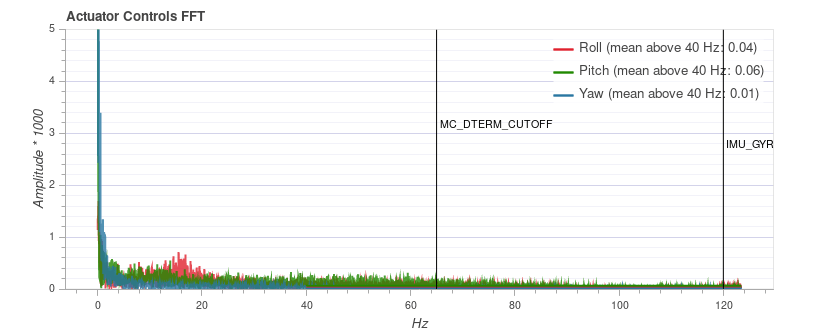
The excellent vibration characteristics of the above frame mean that we can considerably increase the cutoff frequency of the software filters (reducing control latency).
DJI F450 프레임(양호한 진동).
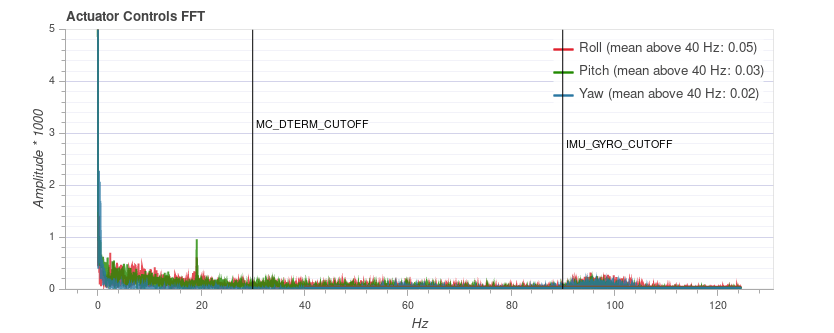
S500 프레임:
While the plot above looks good, the Raw Acceleration graph for the same flight shows that the vibration levels are a bit high for x and y. 이것은 여러 그래프를 확인할 가치가 있는 이유에 대한 좋은 예입니다!
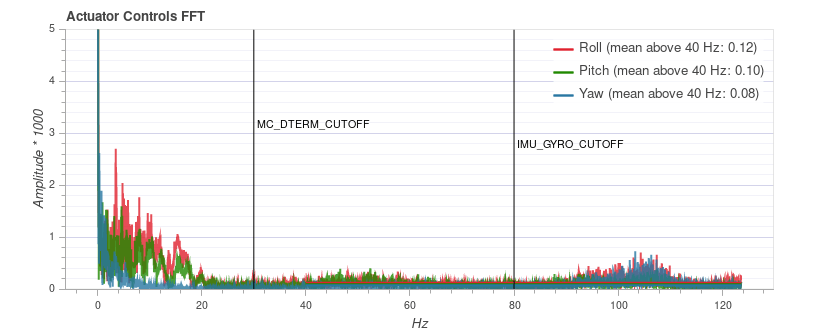
예: 불량 진동
이 예는 50Hz에 가까운 주파수의 피크를 보여줍니다 (이 경우 "느슨한"랜딩 기어로 인해).
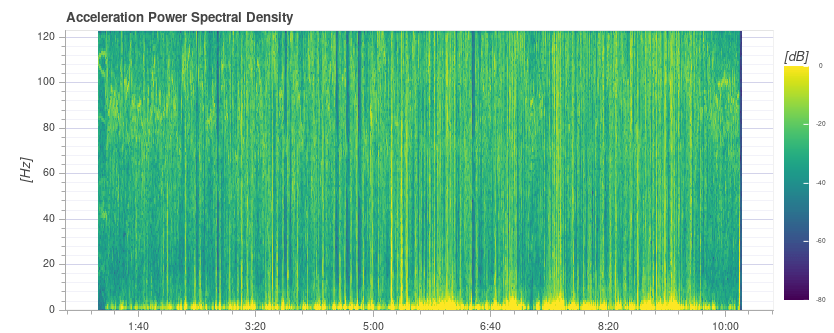
가속 전력 스펙트럼 밀도
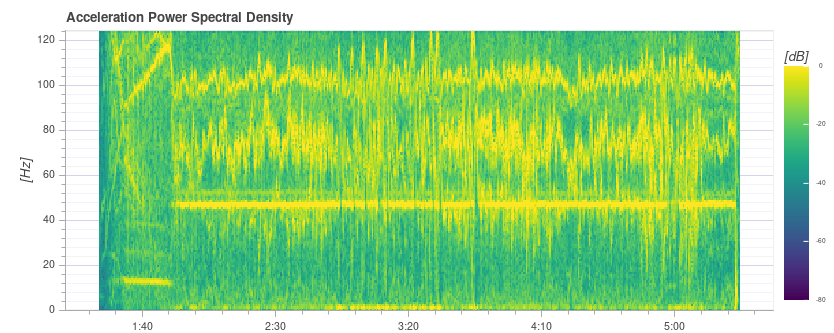
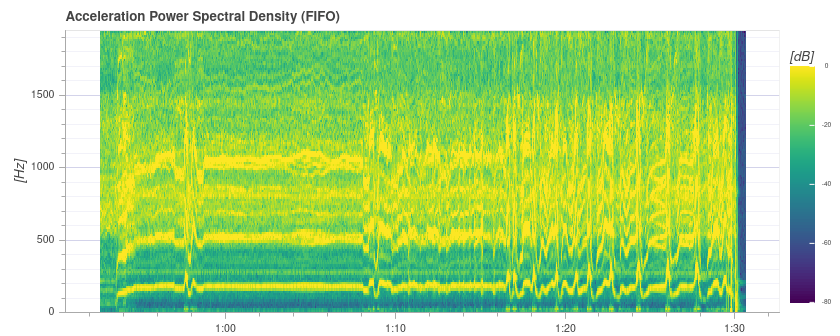
이것은 시간에 따른 원시 가속도계 데이터의 주파수 응답을 보여주는 2D 주파수 플롯입니다 (x, y 및 z 축의 합계를 표시함). 노란색 영역이 많을수록 해당 시간 및 주파수에서 주파수 응답이 높아집니다.
이상적으로는 몇 Hz까지의 가장 낮은 부분만 노란색이고 나머지는 대부분 녹색 또는 파란색입니다.
예: 양호한 진동
QAV-R 5 "Racer 프레임 (양호한 진동).
DJI F450 프레임(양호한 진동).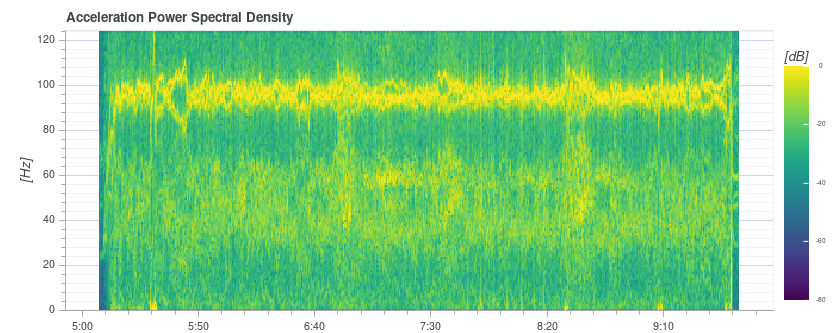
INFO
Above you can see the blade passing frequency of the propellers at around 100 Hz.
S500 프레임: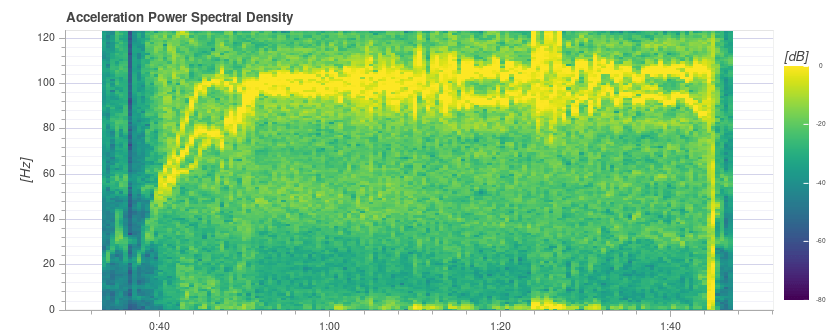
예: 불량 진동
약 100Hz의 강한 노란색 선은 추가 조사가 필요한 잠재적인 문제를 나타냅니다 (다른 차트 검토부터 시작).
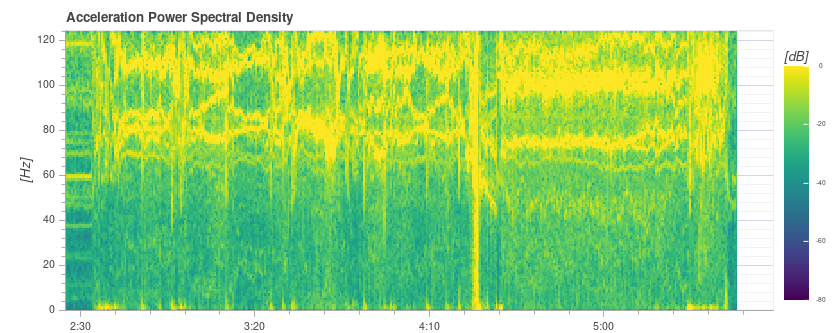
이 그래프는 50Hz에 가까운 주파수의 피크를 보여줍니다 (이 경우 "느슨한"랜딩 기어로 인해).
TIP
이것은 기체 역학에 가까운 강력한 단일 저주파이기 때문에 가능한 문제를 나타냅니다. 기본 필터 설정인 80Hz 진동은 50Hz에서 필터링되지 않습니다.
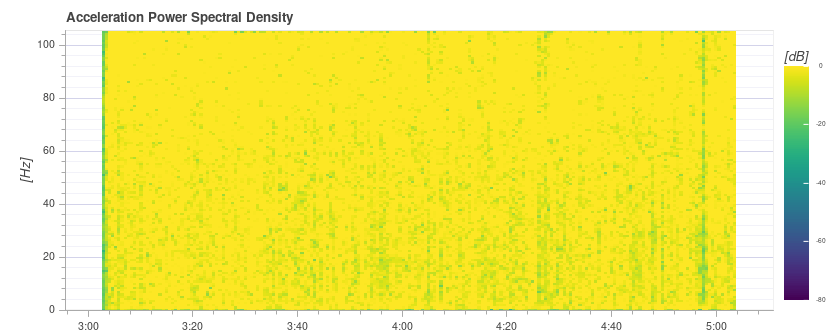
매우 높은 (안전하지 않은) 진동! 그래프는 거의 완전히 노란색입니다.
WARNING
높은 진동 수준으로 비행하여서는 안됩니다.
원시 가속
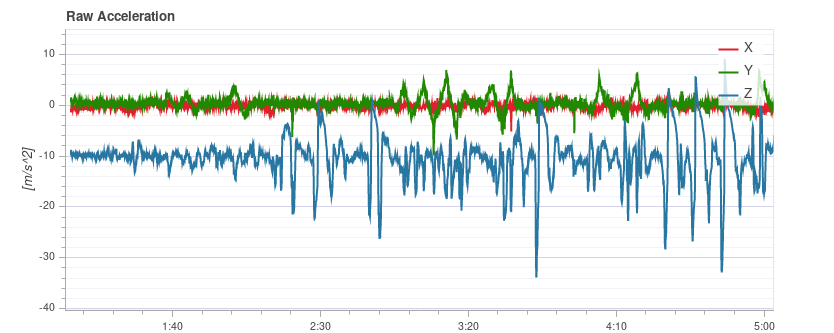
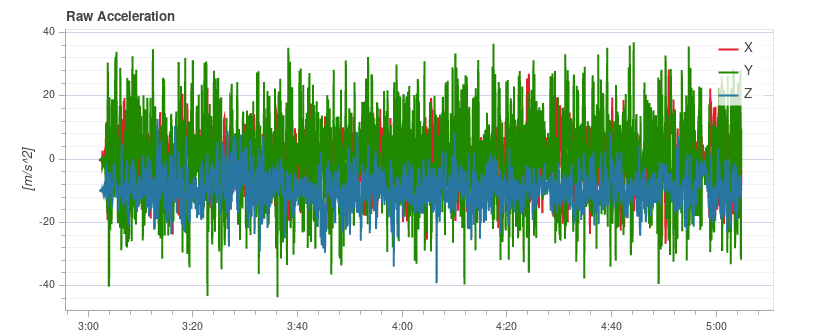
이 그래프는 x, y 및 z 축에 대한 원시 가속도계 측정을 보여줍니다. 이상적으로 각 선은 가늘고 기체의 가속도를 보여줍니다.
경험상 z 축 그래프가 호버링 또는 느린 비행 중에 x/y 축 그래프에 닿으면, 진동 수준이 너무 높은 것입니다.
TIP
이 그래프를 사용하는 가장 좋은 방법은 차량이 호버링하는 부분을 약간 확대하는 것입니다.
예: 양호한 진동
QAV-R 5 "Racer 프레임 (양호한 진동).
DJI F450 프레임(양호한 진동).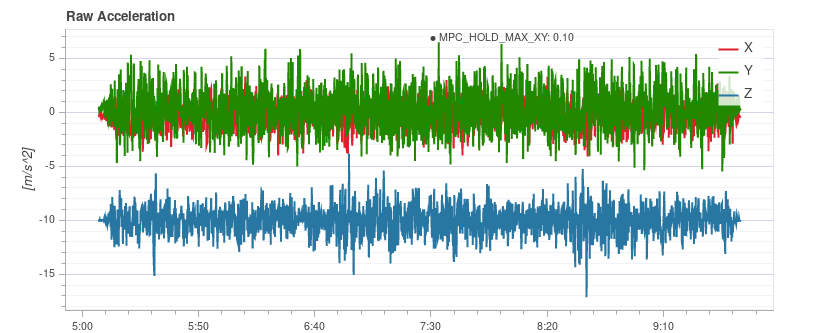
예: 불량 진동
S500 프레임. 경계선 진동 수준-x 및 y에 대해 약간 높음 (S500 기체의 경우 일반적임). 이것은 비행 성능에 부정적인 영향을 미치기 시작하는 한계입니다.
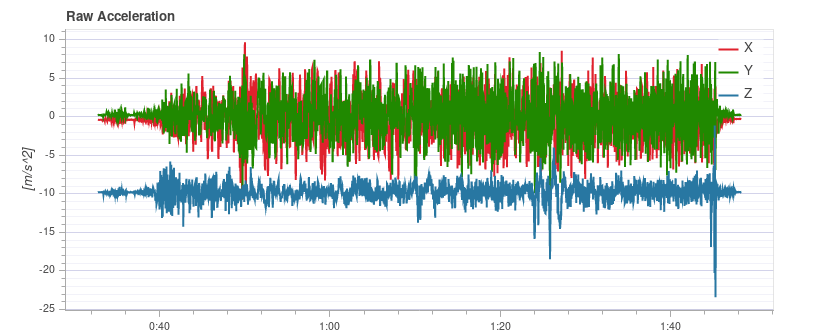
너무 강한 진동 z 축의 그래프가 x/y 축 그래프와 어떻게 겹치는 지 확인하십시오.
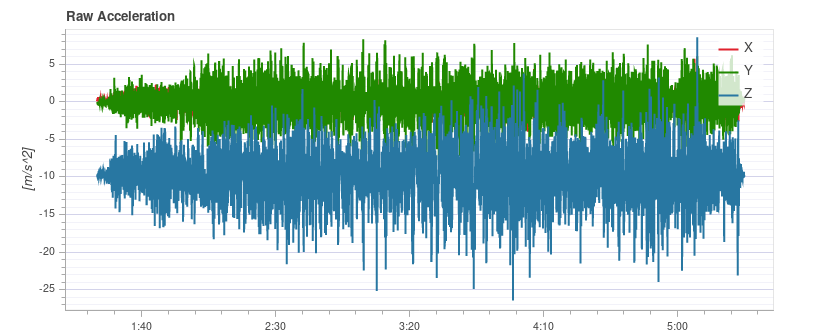
진동 수준이 너무 높습니다. z 축의 그래프가 x/y 축 그래프와 어떻게 겹치는 지 확인하십시오.
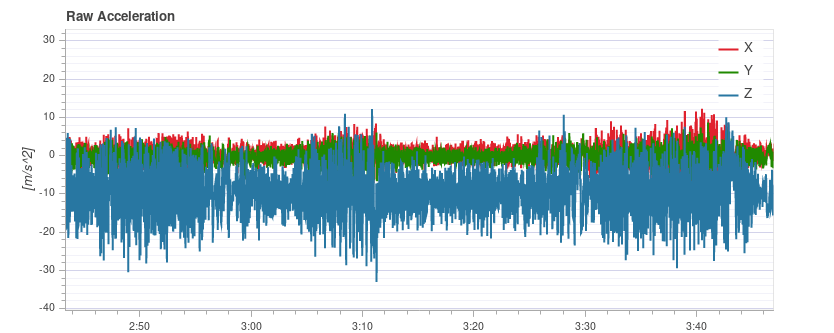
매우 높은 (안전하지 않은) 진동 수준.
WARNING
높은 진동 수준으로 비행하여서는 안됩니다.
원시 고속 IMU 데이터 플롯
심층 분석을 위해 원시 IMU 데이터를 전체 속도 (IMU에 따라 몇 kHz)로 기록하는 옵션이 있습니다. 이를 통해 일반 로깅보다 훨씬 더 높은 주파수를 검사할 수 있으므로 진동 마운트를 선택하거나 저역 통과 및 노치 필터를 적절하게 구성시에 도움이 될 수 있습니다.
이를 사용하려면 일부 매개 변수를 변경하여야 합니다.
- IMU_GYRO_RATEMAX를 400으로 설정합니다. 이렇게하면 원시 센서 데이터가 센서에서 시스템의 나머지 부분으로 전송될 때보다 효율적으로 압축되고 로그 크기가 줄어듭니다 (유용한 데이터를 줄이지 않고).
- IMU 데이터에는 높은 로깅 대역폭이 필요하므로, 좋은 SD 카드를 사용하여야 합니다(로깅 속도가 너무 높으면 Flight Review에서 드롭 아웃이 표시됨).
TIP
많이 사용하는 SD 카드를 비교하려면 로깅> SD 카드를 참조하세요.
- SDLOG_PROFILE에서 자이로 또는 가속 고속 FIFO 프로필을 활성화하고 나머지 항목은 비활성화 합니다. 정말 좋은 SD 카드를 사용하면 (드롭 아웃이 적거나 없음) 다음 작업을 수행 할 수 있습니다.
- 가속 및 자이로 프로필 모두 활성화
- 또는 가속/자이로와 기본 로깅 프로필을 활성화합니다.
그래프 예:
INFO
Data of the first IMU is logged, which is not necessarily the same as the one used for flying. :::note 첫 번째 IMU의 데이터가 기록되며, 비행에 사용되는 데이터와 반드시 동일하지는 않습니다.
INFO
Do not forget to restore the parameters after testing.
진동 문제 해결
진동의 원인(또는 여러 원인의 조합)을 로그만으로는 알 수 없는 경우가 많이 있습니다.
이러한 경우에는 기체를 검사하여야 합니다. 진동 방지은 진동을 줄이기 위하여 확인할 수있는 (및 수행 할) 몇 가지 기본적인 사항들에 대하여 설명합니다.
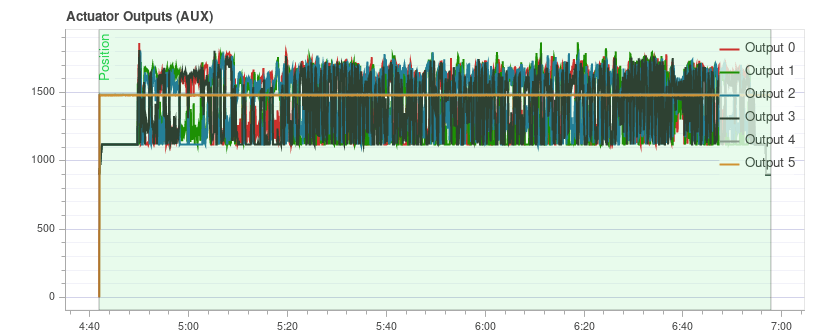
액추에이터 출력
액추에이터 출력 그래프는 개별 액추에이터 (모터/서보)로 전송되는 신호를 나타냅니다. 일반적으로 최소 및 최대 구성된 PWM 값 사이의 범위입니다 (예 : 1000 ~ 2000).
다음은 정상적인 쿼드로터의 예입니다 (모든 신호가 범위 내에 있고, 서로 거의 겹치며, 너무 시끄럽지 않음).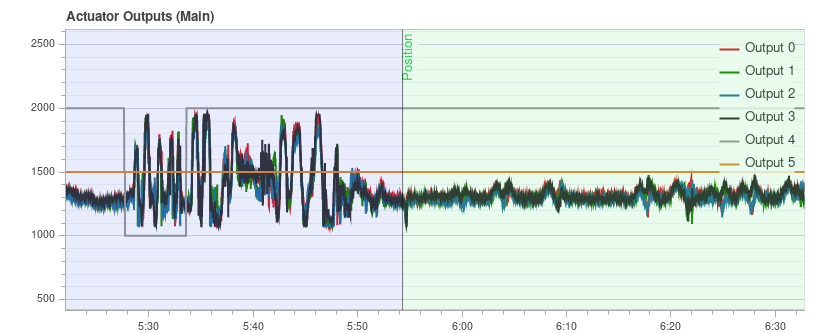
그래프 여러가지 문제점을 식별에 매우 유용합니다.
하나 이상의 신호가 오랜 시간에 걸쳐 최대 값에 도달하면 컨트롤러가 포화에 도달 함을 의미합니다. 예를 들어, 최대 출력 비행시 예상되는 문제점은 아닙니다. 그러나, 예를 들어 임무중에 발생하는 것은 기체가 제공할 수있는 추력의 양에 비해 과체중임을 나타냅니다.
멀티콥터의 경우 그래프는 기체는 불균형인 경우 좋은 표시가 될 수 있습니다. 그래프에서 하나 이상의 인접 모터(쿼드 로터의 경우 2 개)가 평균적으로 더 높은 추력으로 작동해야 함을 보여줍니다. 일부 모터가 다른 모터보다 더 많은 추력을 제공하거나 ESC가 보정되지 않은 경우에도 마찬가지입니다. 불균형 차량은 일반적으로 자동 조종 장치가 자동으로 설명하므로 큰 문제는 아닙니다. 그러나, 최대 달성 가능한 추력을 줄이고 일부 모터에 더 많은 부담을 주므로 기체의 균형을 맞추는 것이 좋습니다.
요 축에서도 불균형이 발생할 수 있습니다. 그래프는 이전 사례와 비슷하게 보이지만 반대 모터는 각각 더 높거나 낮게 작동합니다. 원인은 하나 이상의 모터가 기울어 졌기 때문일 수 있습니다.
다음은 헥사 로터의 예입니다. 모터 1, 3, 6은 더 높은 추력으로 작동합니다.
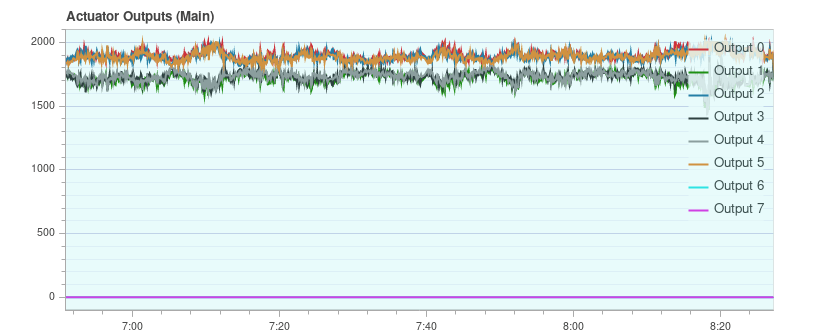
신호가 잡음이 심한 (진폭이 높음) 경우에는 두 가지 원인이 있을 수 있습니다. 컨트롤러를 통과하는 센서 노이즈 또는 진동 (다른 플롯에도 표시됨, 이전 섹션 참조) 또는 PID 이득이 너무 높은 경우 입니다. 이것은 극단적인 경우의 예입니다.
GPS 불확실성
그래프 여러가지 문제점을 식별에 매우 유용합니다.
- 사용된 위성 수 (약 12 개 이상이어야 함)
- 수평 위치 정확도 (1 미터 미만이어야 함)
- 수직 위치 정확도 (2 미터 미만이어야 함)
- GPS 수정 : 3D GPS 수정의 경우 3, GPS + Dead Reckoning의 경우 4, RTK 플로트의 경우 5, RTK 고정 유형의 경우 6입니다.
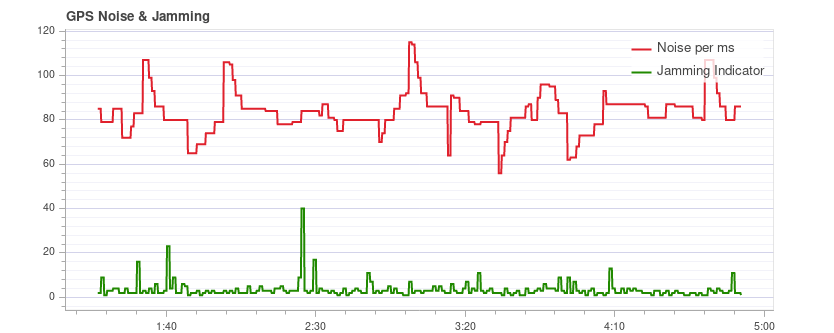
GPS 잡음과 방해 전파
GPS 노이즈와 방해 전파 그래프로 GPS 신호 간섭 및 방해 전파를 확인할 수 있습니다. GPS 신호는 매우 약하므로 GPS에서 사용하는 주파수를 사용하는 (케이블을 통해) 부품으로 인하여 방해를 받기 쉽습니다.
USB
3 is known to be an effective GPS jamming source.
방해 표시기는 약 40 이하이어야 합니다. 약 80 이상의 값은 너무 높으므로 설정을 검사하여야 합니다. 신호 간섭은 정확도가 떨어지고 GPS 수정이 불가능한 지점까지 위성 수가 적기 때문에 현저하게 나타납니다.
이것은 간섭이없는 예입니다.
추력 및 자기장
추력 및 자기장 그래프는 자기 센서 측정 벡터의 추력과 표준을 나타냅니다.
표준은 전체 비행에 걸쳐 일정해야하며 추력과 관련이 없어야합니다. 이것은 표준이 상수에 매우 가까운 좋은 예입니다. 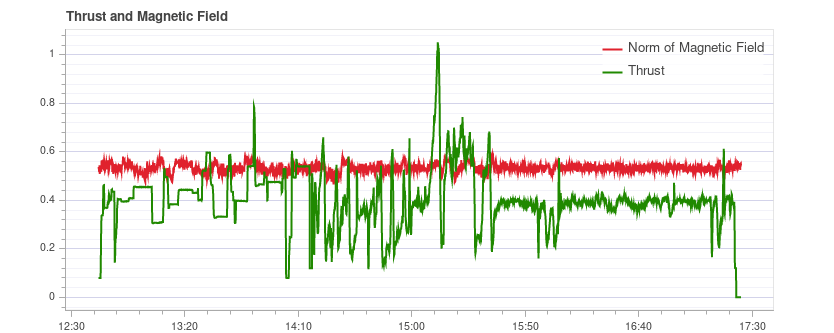
상관 관계가 있는 경우 모터 (또는 다른 소비자)에서 끌어온 전류가 자기장에 영향을 미치고 있음을 의미합니다. 이것은 부정확한 요 추정으로 이어지므로 피해야 합니다. 다음 플롯은 자력계의 추력과 표준 사이의 강한 상관 관계를 나타냅니다. 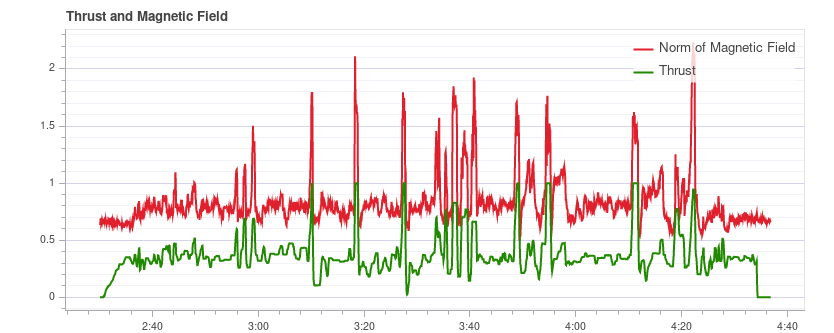
이에 대한 해결책은 다음과 같습니다:
- 외부 자력계를 사용하십시오 (내부 자력계는 사용하지 마십시오).
- 외부 자력계를 사용하는 경우 강한 전류에서 먼 곳에 장착하여야 합니다.(예 : 더 긴 GPS 마스트 사용).
표준이 상관 관계가 없지만 일정하지 않은 경우 제대로 보정되지 않았을 가능성이 높습니다. 그러나, 외부 방해로 인한 것일 수도 있습니다 (예 : 금속 구조물 가까이에서 비행 할 때).
이 예는 표준이 일정하지 않지만 추력과 관련이 없음을 보여줍니다.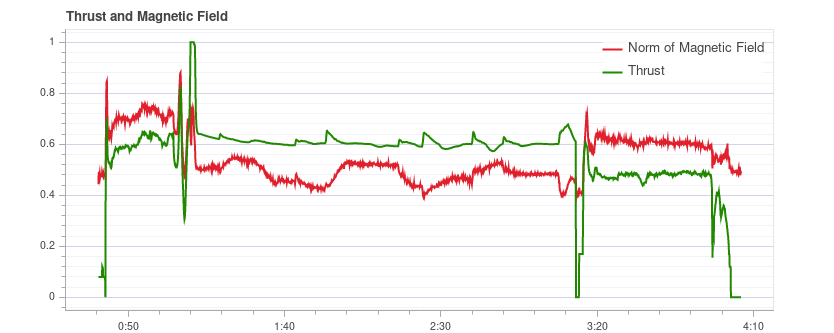
Estimator Watchdog
Estimator Watchdog 플롯은 추정기의 상태 보고서를 보여줍니다. 상수 0 이어야합니다.
문제가 없는 경우 다음과 같이 표시됩니다.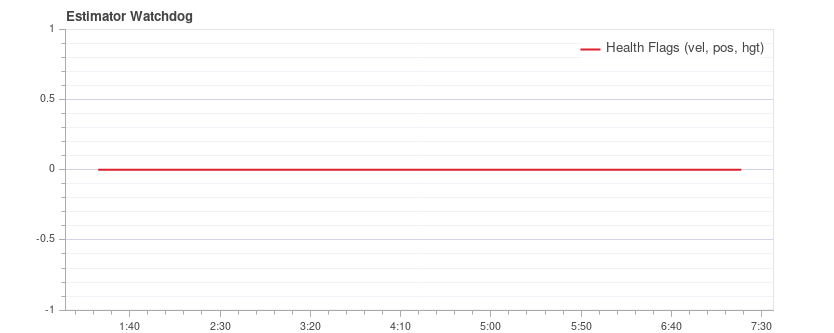
플래그 중 하나가 0이 아니면 추정기는 조사가 필요한 문제를 감지한 것입니다. 대부분의 경우 이것은 자력계 간섭과 같은 센서의 문제입니다. 일반적으로 해당 센서의 플롯을 보면 도움이 됩니다.
다음은 자력계 문제가 있는 경우의 예입니다.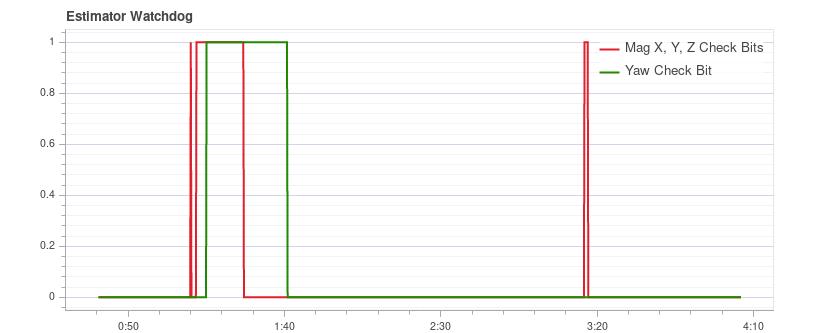
센서 데이터의 샘플링 규칙
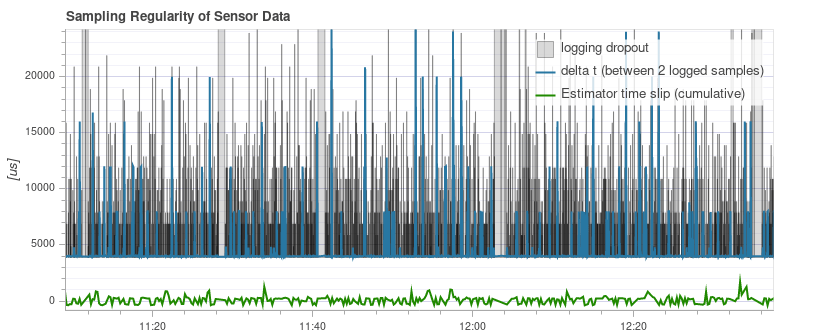
샘플링 규칙 그래프는 로깅 시스템 및 스케줄링 문제에 대한 통찰력을 제공합니다.
샘플링 규칙 그래프는 로깅 시스템 및 스케줄링 문제에 대한 통찰력을 제공합니다.
INFO
Occasional dropouts can be expected on medium quality cards.
델타 t는 로깅된 두 IMU 샘플 간의 시간 차이를 보여줍니다. 데이터 게시 속도가 250Hz이므로 4ms에 가까워야 합니다. 그 배수의 스파이크가 있는 경우 (추정기 타임 슬립이 증가하지 않음) 이는 로거가 일부 샘플을 건너 뛴 것을 의미합니다. 로거가 낮은 우선 순위로 실행되기 때문에 가끔 이런 현상이 발생할 수 있습니다. 배수가 아닌 스파이크가 있는 경우 조사해야하는 불규칙한 센서 드라이버 스케줄링을 나타냅니다.
추정기 타임 슬립은 현재 시간과 해당 시간까지의 통합 센서 간격 시간 간의 차이를 나타냅니다. 변경되면 추정기가 센서 데이터를 놓쳤거나 드라이버가 잘못된 통합 간격을 게시함을 의미합니다. 0으로 유지되어야하지만, 비행중 매개 변수 변경에 대해 약간 증가할 수 있으며 일반적으로 문제가 되지는 않습니다.
이것은 좋은 예입니다.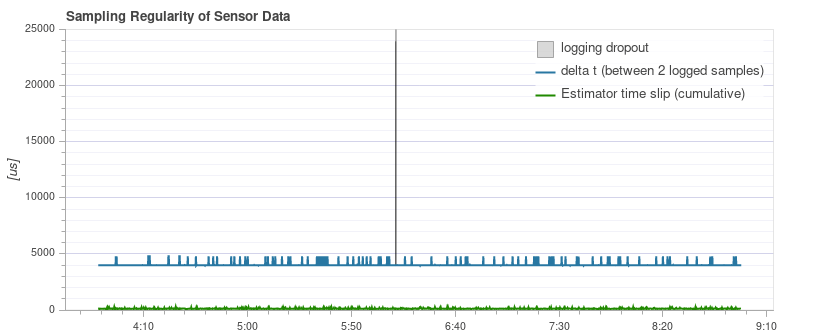
다음 예는 너무 많은 드롭 아웃이 나타나고 있으며, 이 경우 사용 된 SD 카드의 품질이 좋지 않았습니다. (좋은 SD 카드는 여기 참조) :
로그 메시지
시스템 오류와 경고 메시지에 관한 표입니다. 예를 들어 작업이 스택 크기가 낮으면 표시됩니다.
메시지는 개별적으로 검사하여야 하며, 모든 메시지가 문제를 나타내는 것은 아닙니다. 예를 들어 다음은 kill-switch 테스트를 나타냅니다. 
비행/기체 로그 검토 예
기체 상태를 분석시 특정 기체의 여러 그래프를 분석하는 것이 좋습니다 (다른 그래프가 일부 문제를 더 잘 나타낼 수 있음). 이것은 진동 문제를 검토시 특히 중요합니다.
아래 섹션은 비행/기체별로 몇 가지 (이전에 제시된) 그래프를 그룹화합니다.
QAV-R 5" Racer
이 그래프는 모두 QAV-R 5 "Racer의 동일한 비행에서 가져온 것입니다.
진동이 매우 낮은 기체임을 나타냅니다.
- 액추에이터 제어 FFT는 가장 낮은 끝에서 단일 피크 만 표시하고 나머지는 낮고 평평합니다.
- 스펙트럼 밀도는 대부분 녹색이며 저주파에서 약간의 노란색만 있습니다.
- Raw Acceleration에는 x/y 축 트레이스와 잘 분리된 z 축 트레이스가 있습니다.
DJI F450
These charts are all from the same flight of a DJI F450.
진동이 적은 기체임을 나타냅니다 (하지만 위의 QAV-R만큼 낮지는 않습니다!).
- 액추에이터 제어 FFT는 가장 낮은 끝에서 피크를 보여줍니다. 약 100Hz (프로펠러의 블레이드 통과 주파수)에서 범프를 제외하고 나머지 대부분은 평평합니다.
- 스펙트럼 밀도는 대부분 녹색입니다. 블레이드 통과 주파수가 다시 표시됩니다.
- Raw Acceleration에는 x/y 축 트레이스와 잘 분리된 z 축 트레이스가 있습니다.
S500
이 차트는 S550의 동일한 비행에서 가져온 것입니다.
경계선 허용 진동이 있는 기체임을 나타냅니다.
- 액추에이터 제어 FFT는 가장 낮은 끝에서 피크를 보여줍니다. 약 100Hz의 범프를 제외하고는, 나머지 대부분은 평평합니다.
- 스펙트럼 밀도는 대부분 녹색이지만, 100Hz에서 DJI F450보다 노란색이 더 많습니다.
- Raw Acceleration에는 x/y 축 트레이스에 근접한 z 축 트레이스가 있습니다. 이것은 비행 성능에 부정적인 영향을 미치기 시작하는 한계입니다.