Швидке підключення CUAV V5 nano
PX4 не виробляє цей (або будь-який інший) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності.
Цей швидка інструкція показує, як живити польовий контролер CUAV V5 nano та під'єднати його найважливіші периферійні пристрої.
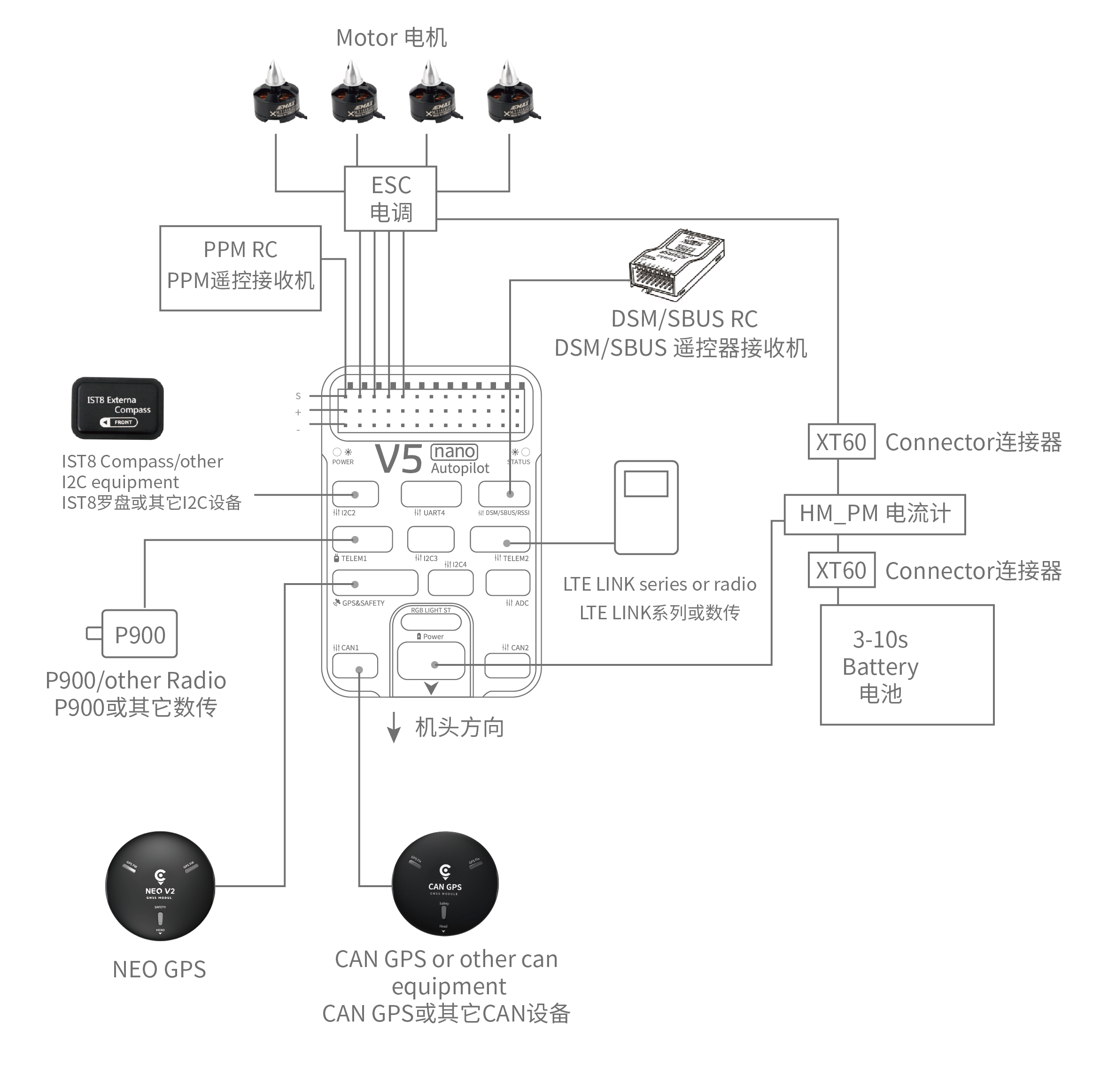
Огляд схеми підключення
На зображенні нижче показано, як під'єднати найважливіші датчики та периферійні пристрої (за винятком виходів мотора та сервоприводів). Ми розглянемо кожну з них докладно в наступних розділах.
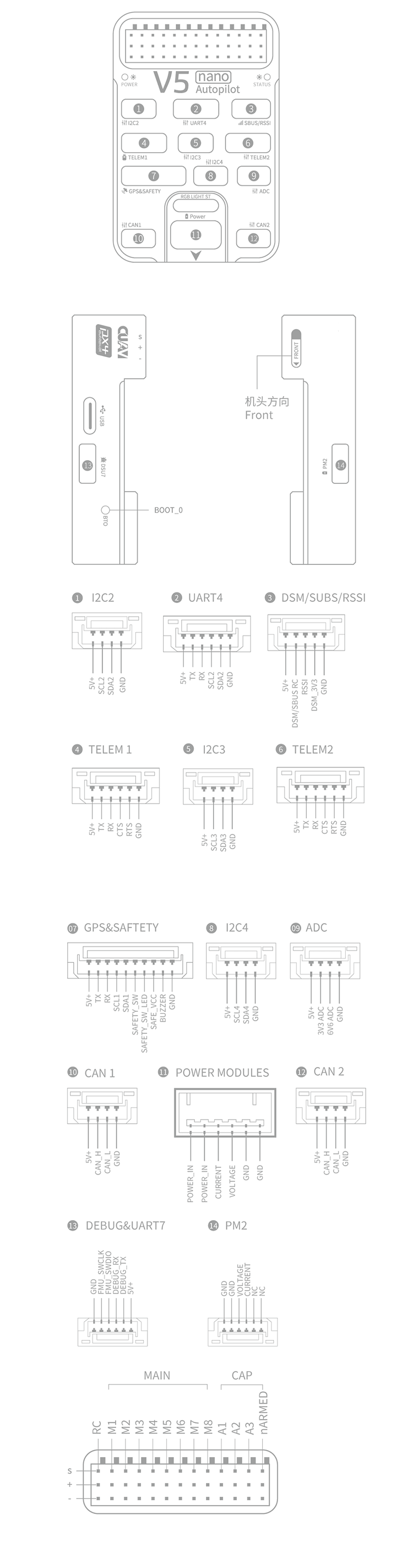
| Основний інтерфейс | Функція |
|---|---|
| Живлення | Під'єднати модуль живлення; Надає живлення та виміри напруги та струму ANALOG. |
| PM2 | Не використовуйте з PX4 |
| TF CARD | Карта SD для зберігання logs (постачається з картою) |
| M1~M8 | PWM виходи. Може бути використаний для управління двигунами або сервоприводами. |
| A1~A3 | Capture pins (not currently supported on PX4). |
| nARMED | Вказує на стан зброєння FMU. Це активне низьке (низьке під час увімкнення). |
| DSU7 | Використовується для дебагінгу FMU, читання інформації щодо дебагінгу. |
| I2C2/I2C3/I2C4 | Підключає пристрій I2C, такий як зовнішній компас. |
| CAN1/CAN2 | Підключає пристрої UAVCAN, такі як CAN GPS. |
| TYPE-C(USB) | Під'єднатися до комп'ютера для зв'язку між контролером польоту та комп'ютером, наприклад, як завантаження прошивки |
| GPS&SAFETY | Приєднайтесь до Neo GPS, який містить GPS, перемикач безпеки, інтерфейс зумовлювача. |
| TELEM1/TELEM2 | Під'єднатися до системи телеметрії. |
| DSM/SBUS/RSSI | Включає інтерфейси введення сигналів DSM, SBUS, RSSI, інтерфейс DSM може бути підключений до приймача DSM-супутника, інтерфейс SBUS - до приймача дистанційного керування SBUS, RSSI - для модуля зворотного повернення сили сигналу. |
Для отримання додаткової інформації про інтерфейс, будь ласка, прочитайте Посібник з V5 nano.
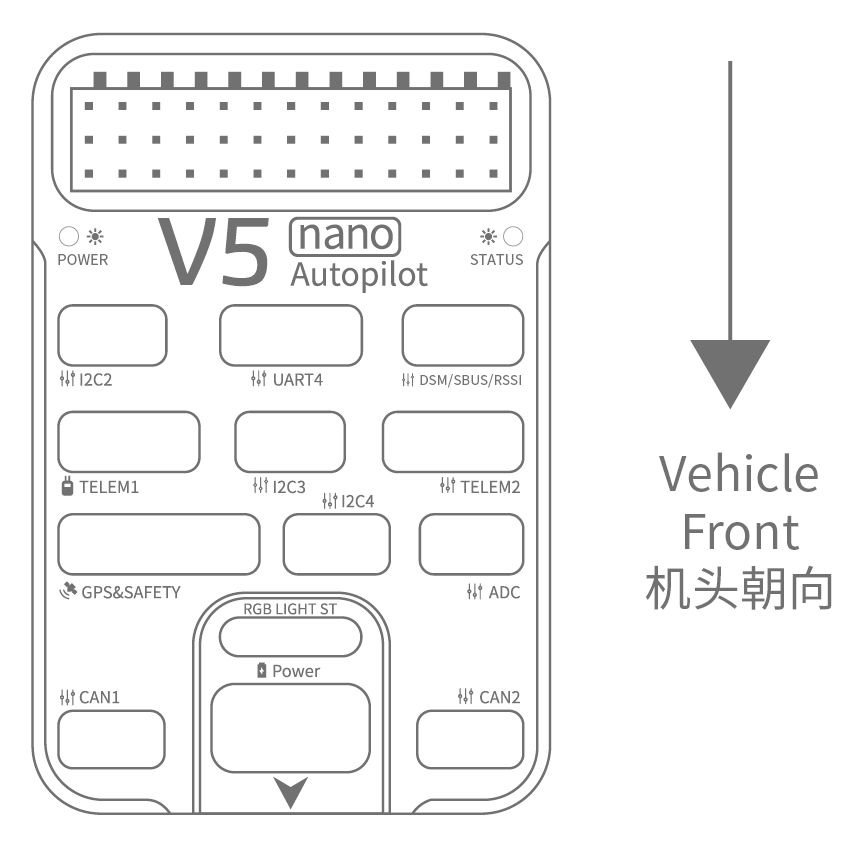
Якщо контролер не може бути змонтований в рекомендованій/стандартній орієнтації (наприклад, через обмеження місця), вам потрібно буде налаштувати програмне забезпечення автопілота з орієнтацією, яку ви фактично використовували: Орієнтація контролера польоту.
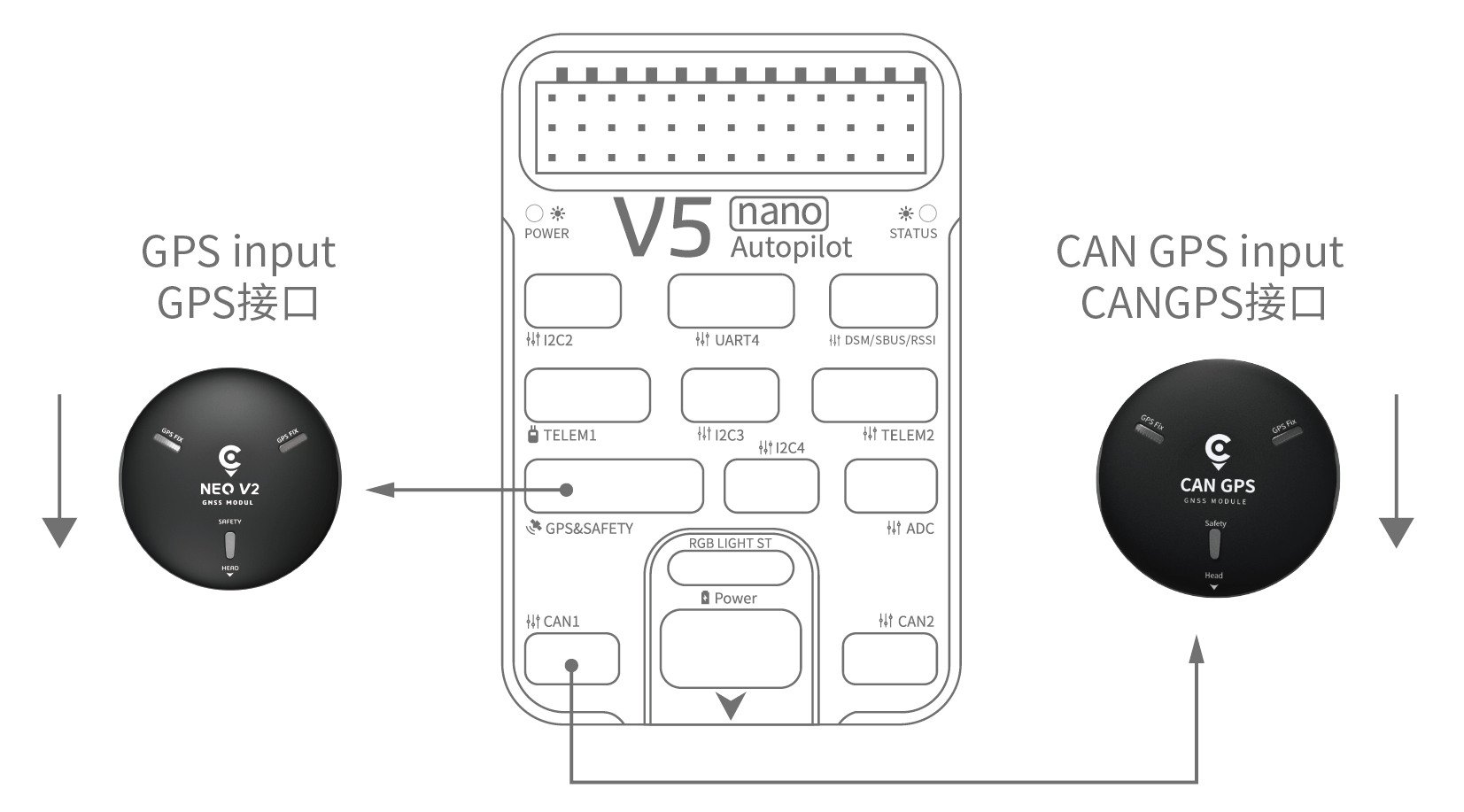
GPS + Компас + Безпечний вимикач + Світлодіоди
Рекомендованим модулем GPS є Neo v2 GPS, який містить GPS, компас, запобіжний вимикач, зумер, світлодіодний індикатор статусу.
Інші модулі GPS можуть не працювати (див. цю проблему сумісності)).
Модуль GPS/Компас слід монтувати на раму якомога подалі від інших електронних пристроїв, з напрямком вперед транспортного засобу (стрілка Neo GPS спрямована в тому ж напрямку, що й стрілка керування польотом). Під'єднайтеся до інтерфейсу GPS контролера польоту за допомогою кабелю.
INFO
Якщо ви використовуєте CAN GPS, будь ласка, використовуйте кабель для підключення до інтерфейсу CAN контролера польоту.
Запобіжний перемикач
Спеціальний запобіжний вимикач, який поставляється з V5+, потрібен лише у випадку, якщо ви не використовуєте рекомендований GPS Neo V2 (у якому вбудований запобіжний вимикач).
Якщо ви літаєте без GPS, ви повинні прикріпити вимикач безпосередньо до порту GPS1, щоб мати можливість озброїти рухомий засіб і летіти (якщо ви використовуєте старий GPS з 6 контактами, будь ласка, прочитайте визначення нижнього інтерфейсу для зміни лінії).
Зумер
Якщо ви не використовуєте рекомендований Neo v2 GPS, зумер може не працювати.
Радіоуправління
Для ручного керування вашим апаратом потрібна система дистанційного керування радіо (RC) (PX4 не вимагає наявності системи радіо для автономних режимів польоту). Вам буде потрібно вибрати сумісний передавач/приймач та потім зв'язати їх, щоб вони взаємодіяли (прочитайте інструкції, що додаються до вашого конкретного передавача/приймача).
На малюнку нижче показано, як ви можете отримати доступ до вашого віддаленого приймача (знайдіть кабель S.Bus у комплекті)
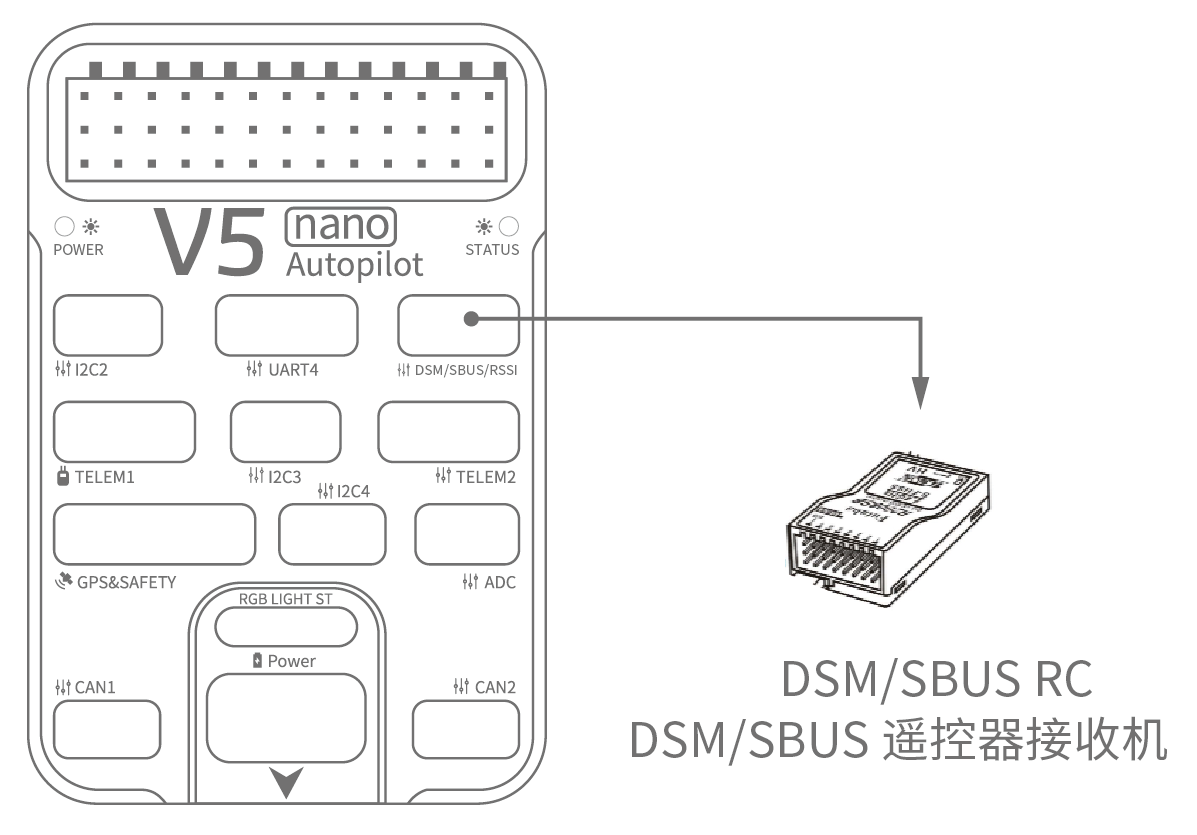
Супутникові приймачі Spektrum
V5 nano має присвячений кабель DSM. Якщо використовується супутниковий приймач Spektrum, його слід підключити до інтерфейсу DSM/SBUS/RSSI контролера польоту.
Потужність
Набір v5 nano включає модуль HV_PM, який підтримує LiPo-акумулятори від 2 до 14S. Підключіть 6-контактний роз'єм модуля HW_PM до інтерфейсу живлення керування польотом Power.
WARNING
Наданий модуль живлення не захищений від перегріву. Живлення повинне бути вимкнене при підключенні периферійних пристроїв.
INFO
Модуль живлення не є джерелом живлення для периферійних пристроїв, підключених до виходів PWM. Якщо ви підключаєте сервоприводи / приводи, вам потрібно окремо живити їх за допомогою BEC.
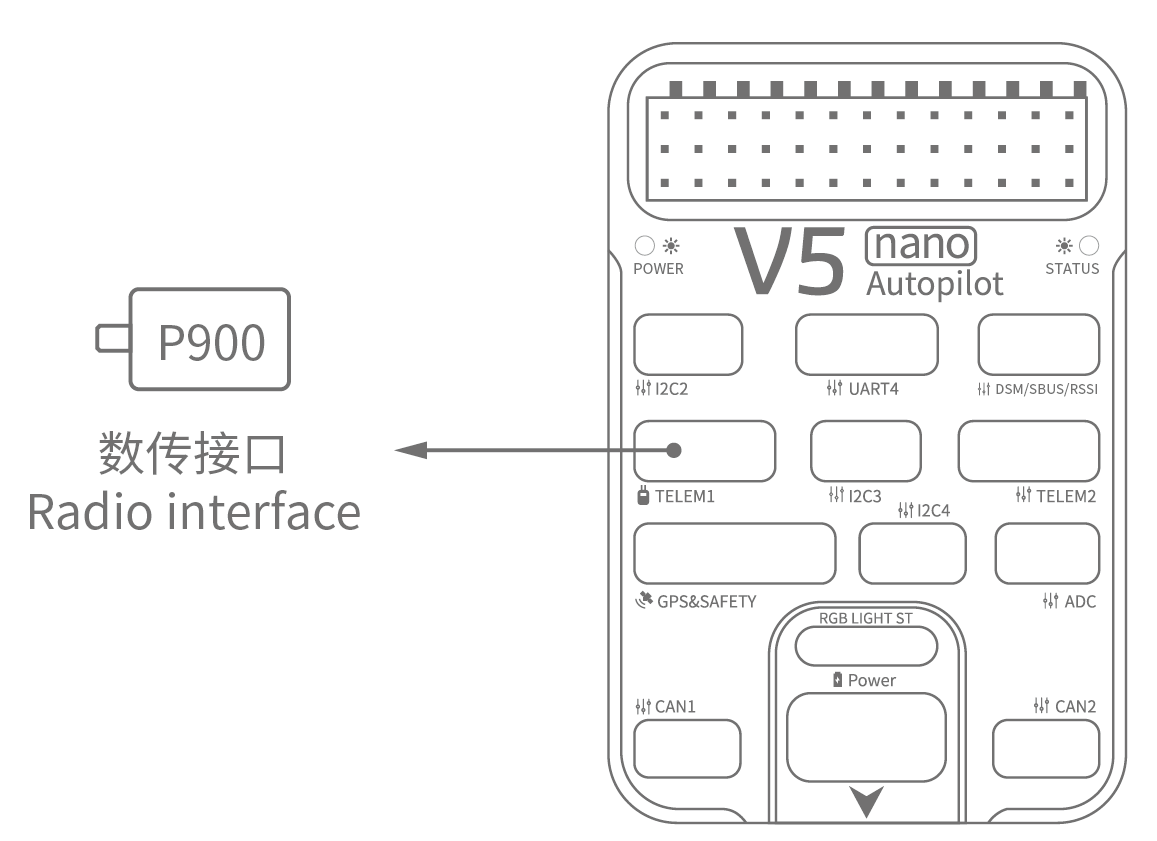
Система телеметрії (Опціонально)
Система телеметрії дозволяє вам спілкуватися, контролювати та управляти транспортним засобом у польоті з наземної станції (наприклад, ви можете направляти БПЛА до певної позиції або завантажувати нове завдання).
Канал зв'язку здійснюється через телеметричні радіостанції. Радіостанцію, розташовану на транспортному засобі, слід підключити до порту TELEM1 або TELEM2 (якщо підключено до цих портів, додаткова конфігурація не потрібна). Інша радіостанція підключається до вашого комп'ютера або мобільного пристрою наземної станції (зазвичай через USB).
SD-карта (Опціонально)
SD-картку вставляють на заводі (вам нічого не потрібно робити).
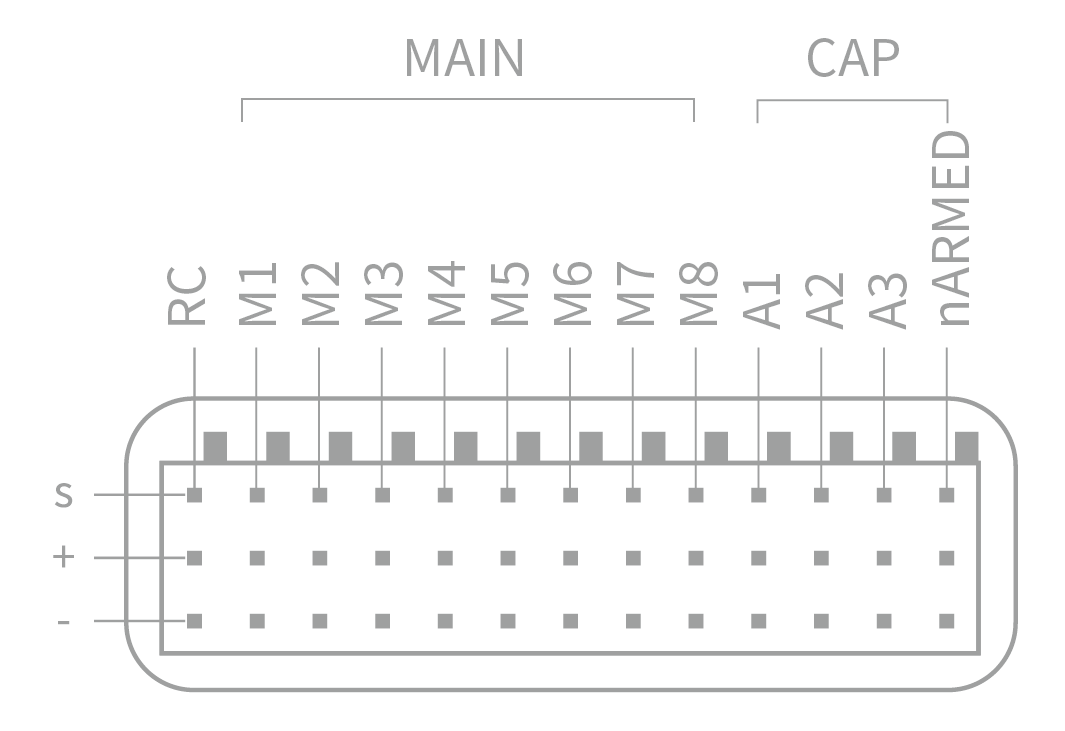
Двигуни
Мотори/сервоприводи підключені до портів MAIN в порядку, вказаному для вашого апарату в Довіднику планерів.
Схема розташування виводів