Швидкий старт з підключенням Pixracer
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо питань технічної підтримки або відповідності вимогам.
WARNING
На стадії проектування
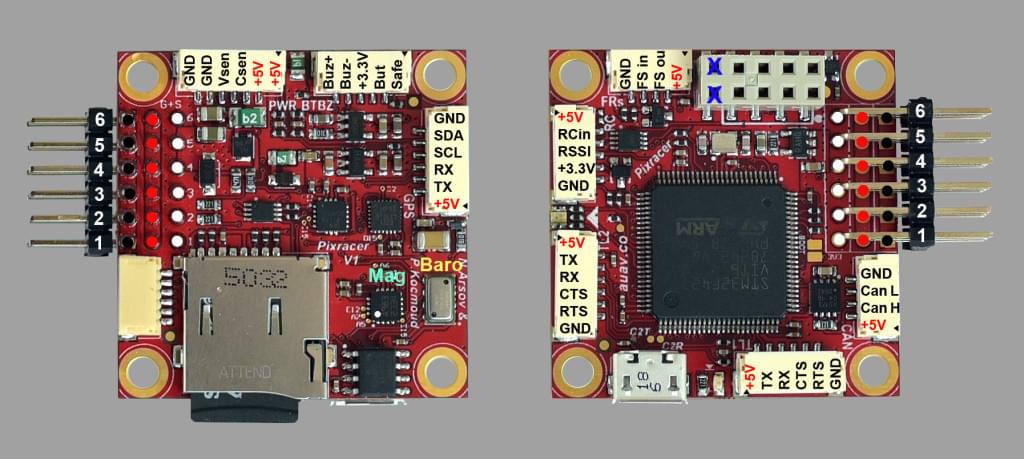
Цей швидкий старт показує, як живити польовий контролер Pixracer та підключити його найважливіші периферійні пристрої.

Посібники з підключення/монтажу
Основне Налаштування
Радіо/Дистанційне Управління
Для ручного керування вашим апаратом потрібна система дистанційного керування радіо (RC) (PX4 не вимагає наявності системи радіо для автономних режимів польоту).
Вам буде потрібно вибрати сумісний передавач/приймач та потім зв'язати їх, щоб вони взаємодіяли (прочитайте інструкції, що додаються до вашого конкретного передавача/приймача).
Нижче наведено інструкції з підключення різних типів приймачів:
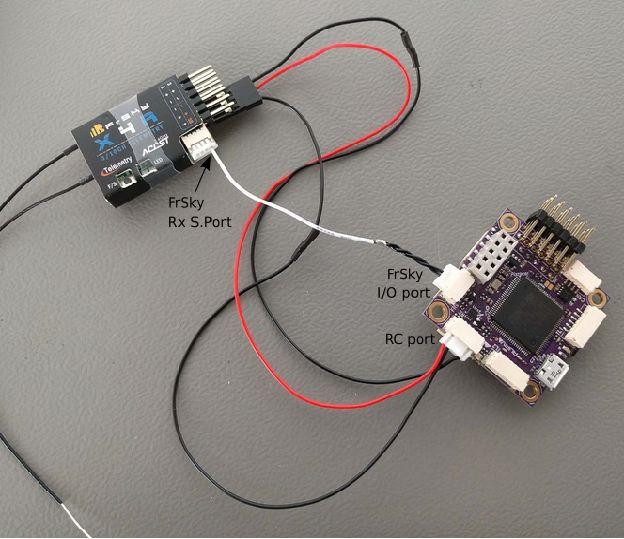
Приймачі FrSky підключаються через показаний порт і можуть використовувати наданий роз'єм введення/виведення.

Приймачі PPM-SUM та S.BUS підключаються до порту RCIN.
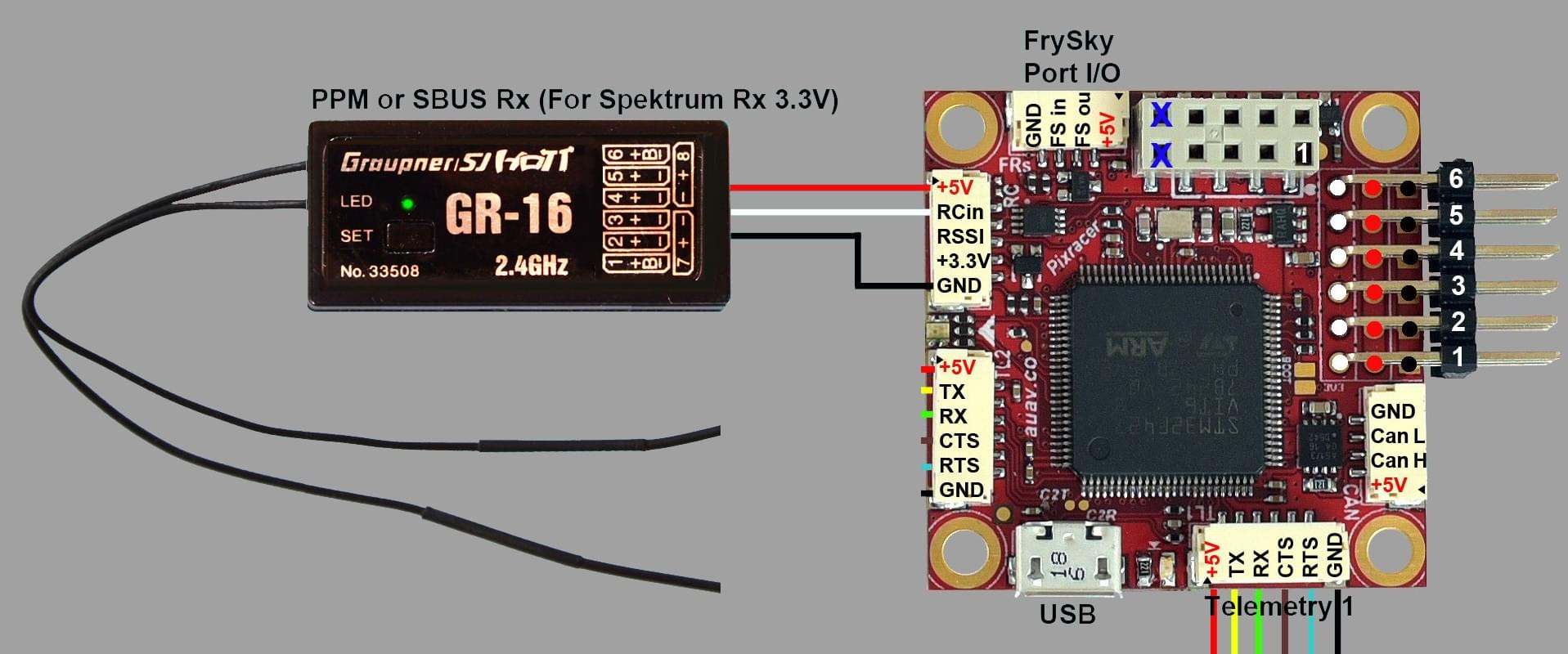
PPM та PWM приймачі, які мають окремий дріт для кожного каналу, повинні підключатися до порту RCIN через PPM перетворювач на зразок цього (PPM-Sum приймачі використовують єдиний сигнальний дріт для всіх каналів).
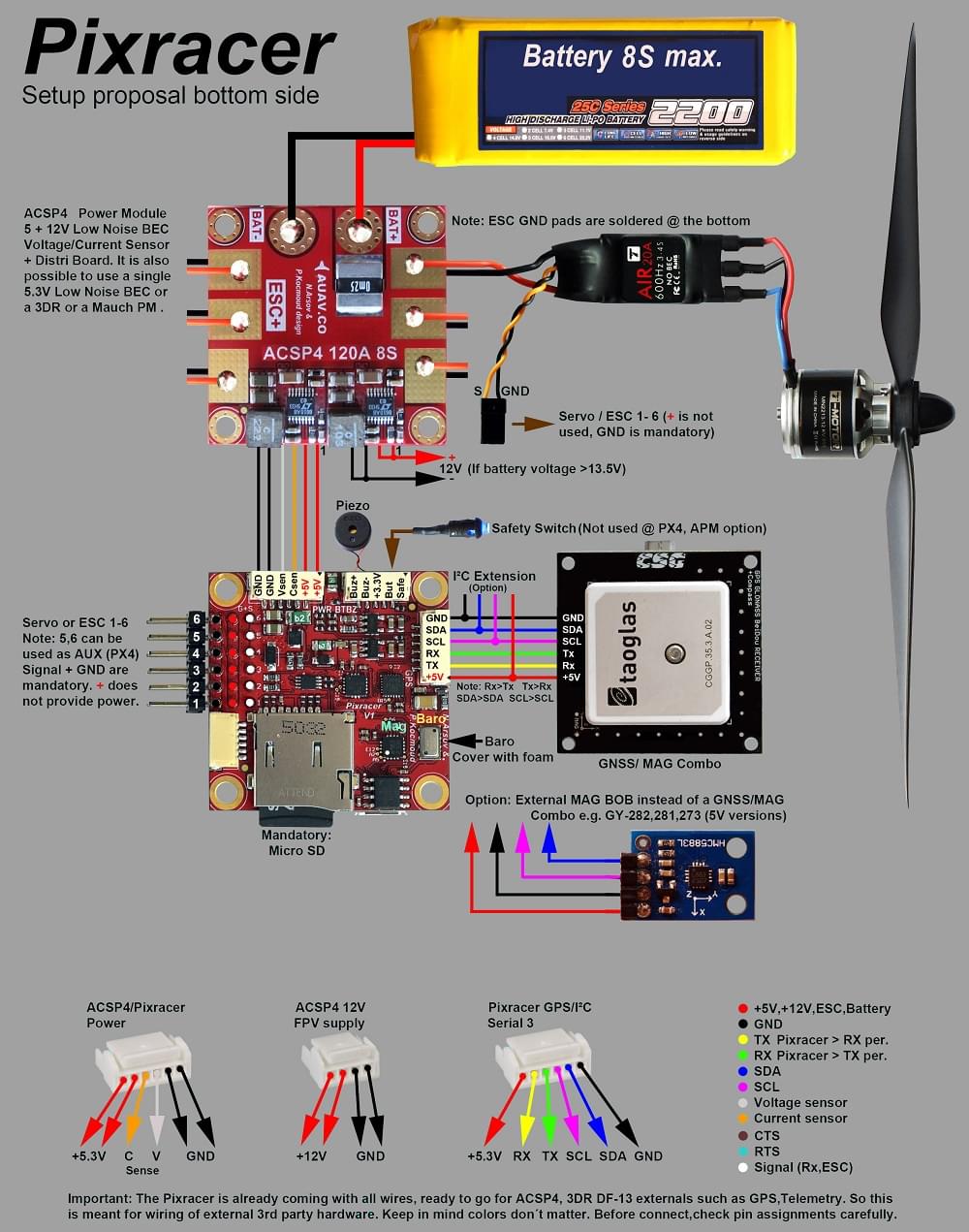
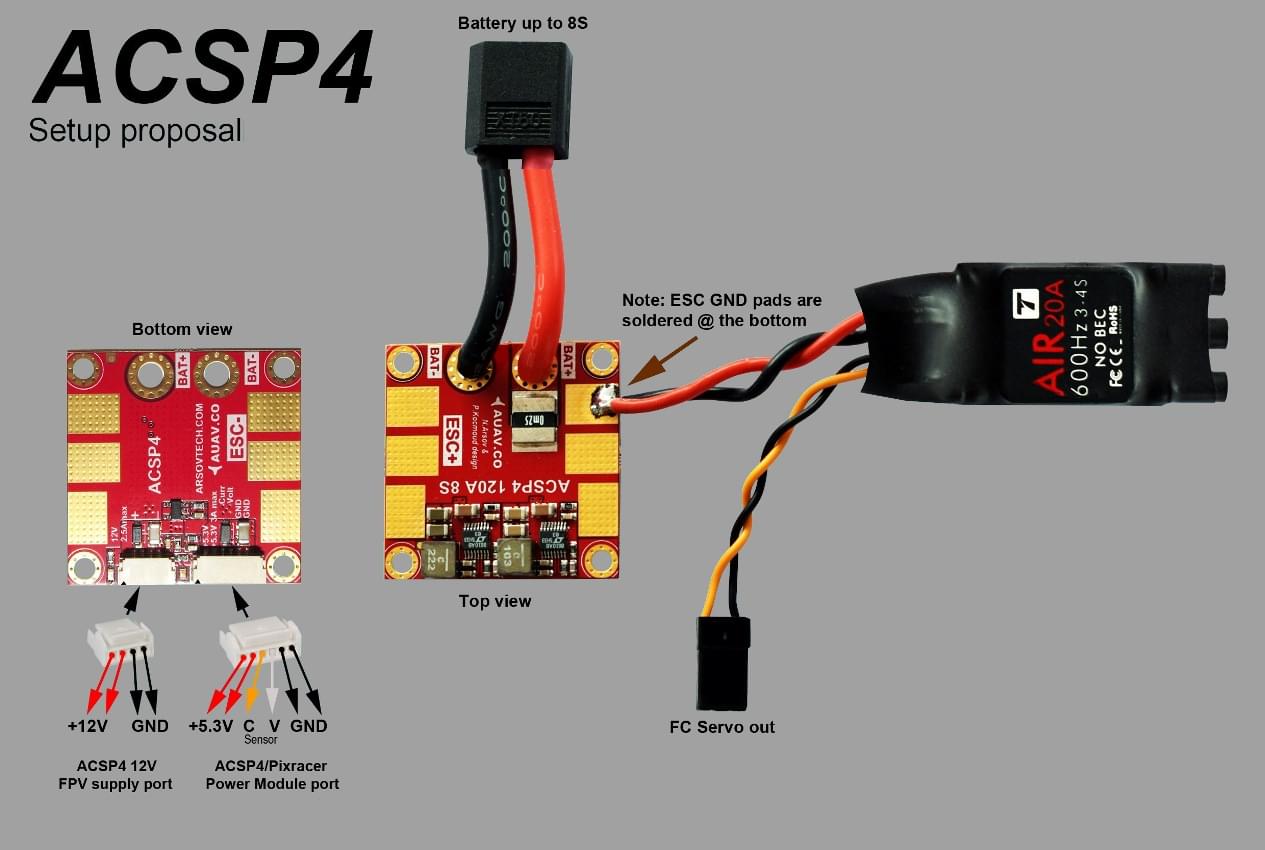
Модуль потужності (ACSP4)
Зовнішня телеметрія
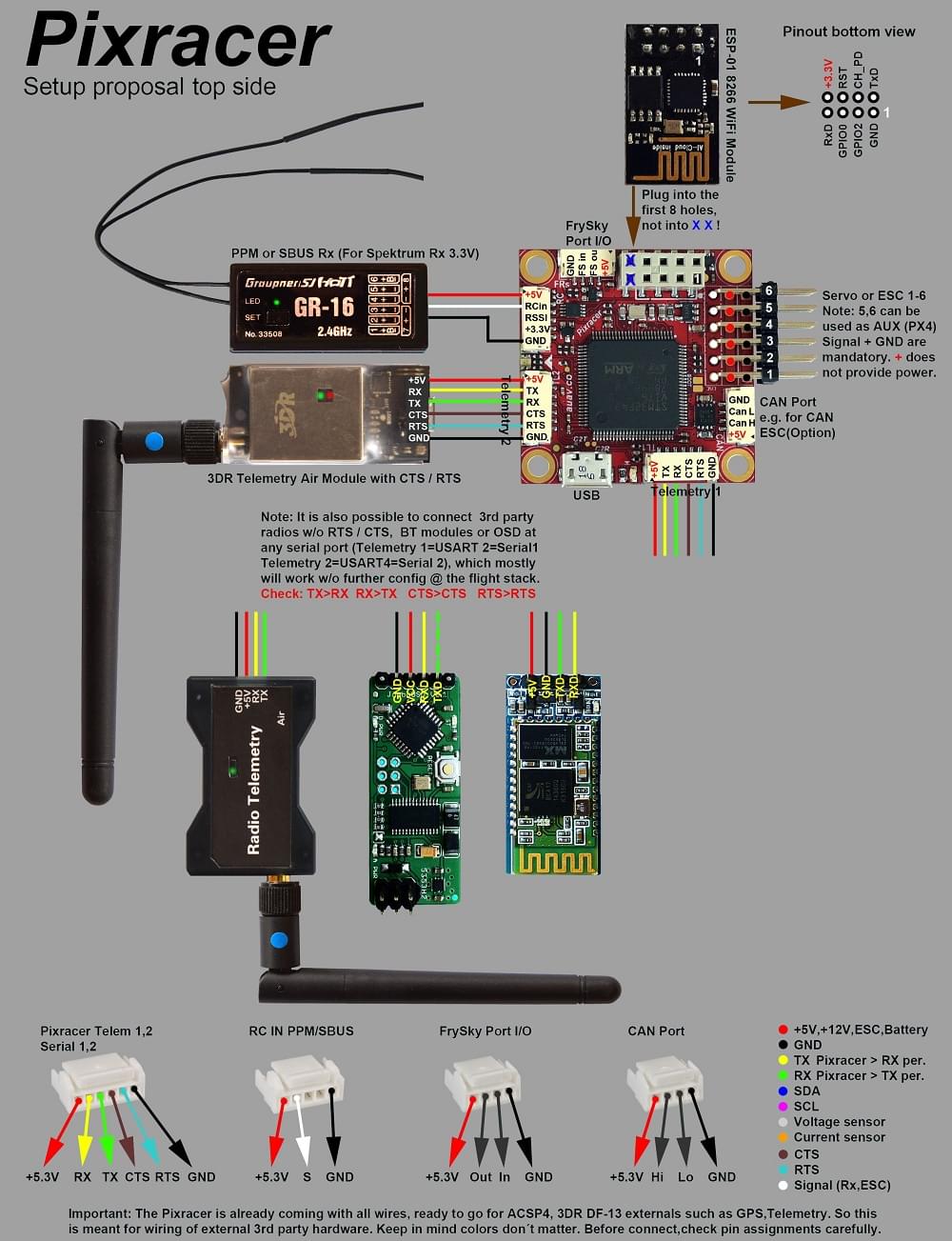
Pixracer має вбудований WiFi, але також підтримує телеметрію через зовнішні модулі Wi-Fi або радіо телеметрії, підключені до портів TELEM1 або TELEM2. Це показано на схемі підключення нижче.
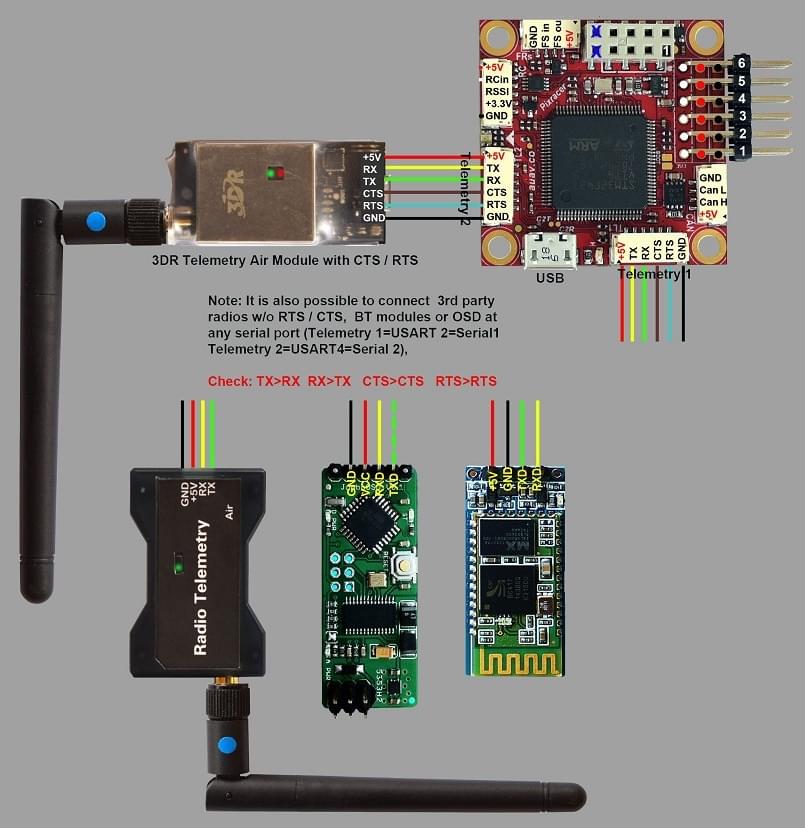
Порт TELEM2 повинен бути налаштований як другий екземпляр MAVLink за допомогою параметра MAV_2_CONFIG. Для отримання додаткової інформації див. Периферійні пристрої MAVLink > Екземпляри MAVLink (і Конфігурація послідовного порту).