CUAV v5 (Знято з виробництва)
DiscontinuedWARNING
Цей політний контролер був знятий з виробництва і більше не продається комерційно.
PX4 не виробляє цей (або будь-який) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності.
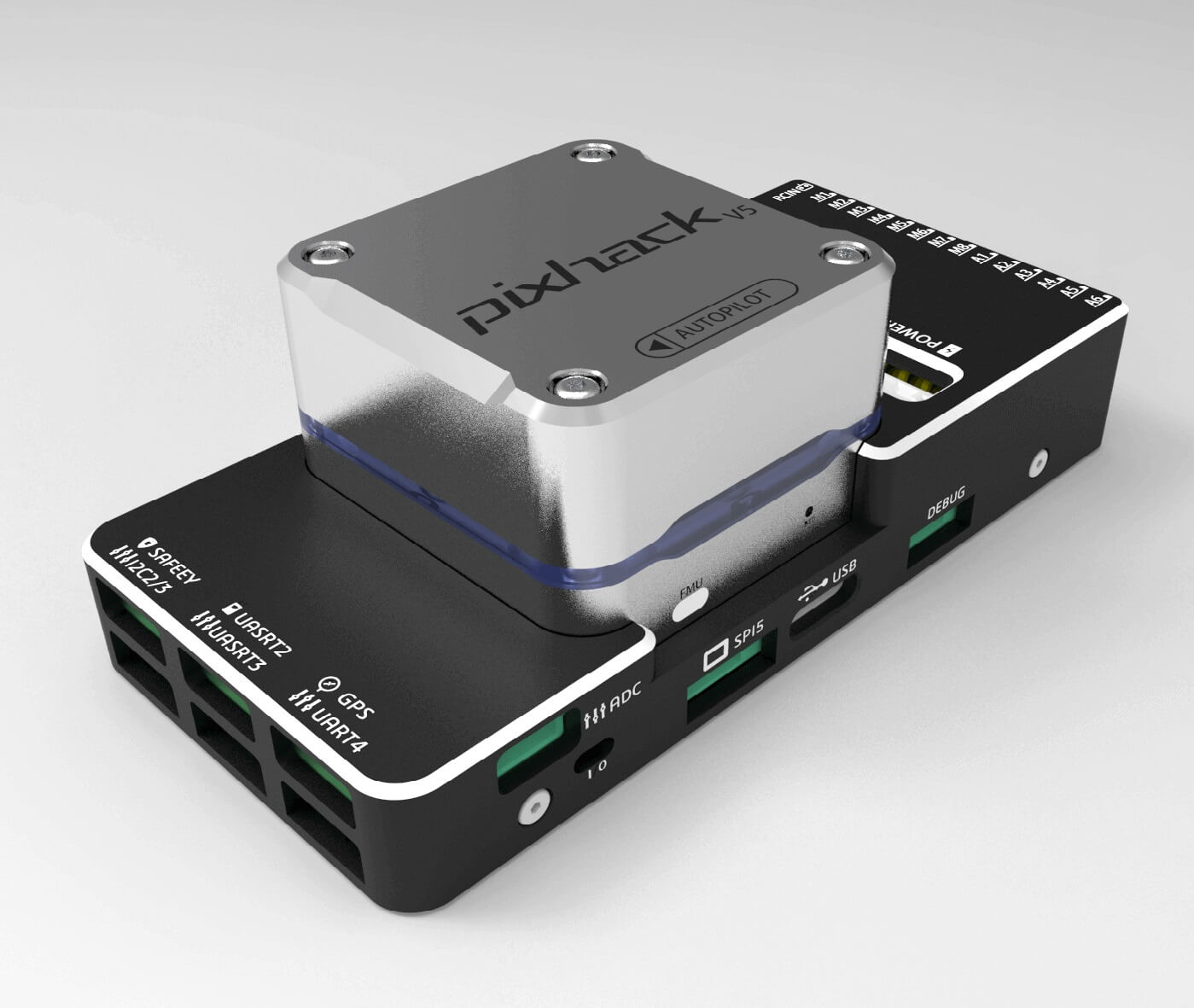
CUAV v5® (раніше "Pixhack v5") - це вдосконалений автопілот, розроблений і виготовлений компанією CUAV®. Плата базується на Pixhawk проекті відкритого апаратного забезпечення FMUv5. Він працює з PX4 на ОС NuttX, і повністю сумісний з прошивкою PX4. Він призначений насамперед для академічних і комерційних розробників.
Короткий опис
Головний FMU процесор: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
IO Processor: STM32F100
- 32 Bit Arm®️ Cortex®️-M3, 24MHz, 8KB SRAM
Бортові сенсори:
- Акселерометр/Гіроскоп: ICM-20689
- Акселерометр/Гіроскоп: BMI055
- Магнітометр: IST8310
- Барометр: MS5611
Інтерфейси:
- 8-14 PWM виходів (6 з IO, 8 з FMU)
- 3 виділених PWM/Capture входи на FMU
- Виділений R/C вхід для CPPM
- Спеціалізований R/C вхід для PPM і S.Bus
- аналоговий / PWM вхід RSSI
- Вихід сервоприводу S.Bus
- 5 загальних послідовних портів
- 4x I2C порти
- 4 шини SPI
- 2 CANBuses з послідовними ESC
- Аналогові входи для напруги / струму з 2 батарей
Система живлення:
- Живлення: 4.3~5.4В
- Вхід USB: 4.75~5.25В
- Вхід сервоприводу: 0~36 В
Вага та розміри:
- Вага: 90г
- Розміри: 44x84x12мм
Інші характеристики:
- Робоча температура: -20 ~ 80°С (виміряне значення)
Де придбати
Замовлення від CUAV.
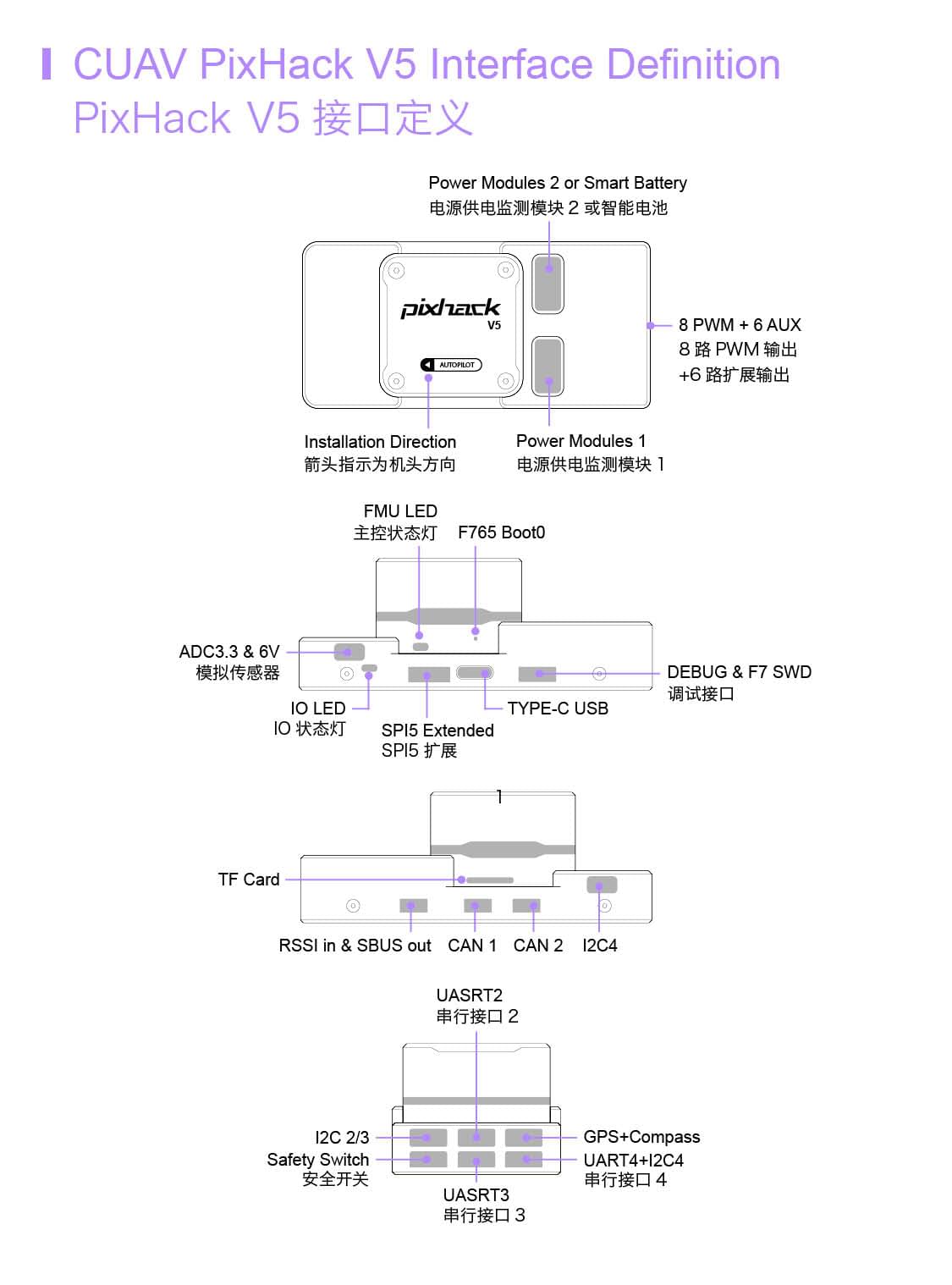
Підключення
WARNING
Інтерфейс RCIN призначений лише для живлення радіоприймача і не може бути підключений до будь-якого джерела живлення/навантаження.
Номінальна напруга
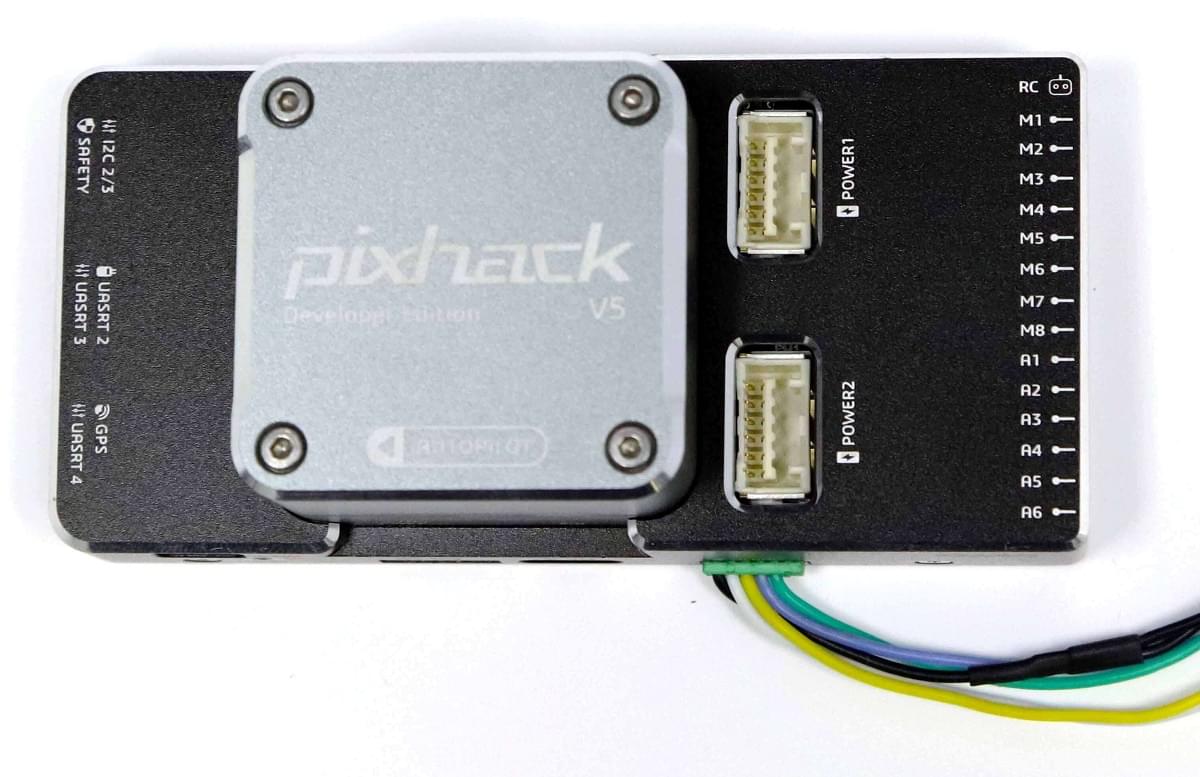
CUAV v5 може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини живлення: POWER1, POWER2 і USB.
Вихідні шини живлення FMU PWM OUT та I/O PWM OUT (від 0В до 36В) не живлять плату контролера польоту (і не живляться від неї). Ви повинні подавати живлення на один з POWER1, POWER2 або USB, інакше плата буде знеструмлена.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- Входи POWER1 та POWER2 (4,3 - 5,4 В)
- USB вхід (4.75В до 5.25В)
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана і автоматично встановлюється за допомогою QGroundControl при підключенні відповідного обладнання.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v5_defaultВідладочний порт
Системна консоль PX4 та SWD interface працюють на порту FMU Debug. Просто підключіть кабель FTDI до роз'єму Debug & F7 SWD. Щоб отримати доступ до порту відладки вводу/виводу, користувач повинен видалити оболонку CUAV v5. Обидва порти мають стандартні послідовні контакти і можуть бути підключені до стандартного кабелю FTDI (3,3 В, але допускається 5 В).
Схема підключення показана.
| пін | CUAV v5 debug |
|---|---|
| 1 | GND |
| 2 | FMU-SWCLK |
| 3 | FMU-SWDIO |
| 4 | UART7_RX |
| 5 | UART7_TX |
| 6 | VCC |
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX - RC-вхід з роз'єму SBUS_RC |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | PX4IO |
Периферія
Supported Platforms / Airframes
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними РК сервоприводами або сервоприводами Futaba S-Bus. Повний набір підтримуваних конфігурацій можна переглянути в Довіднику авіаційних платформ.