Польотний контролер Hex Cube Black
PX4 не виробляє цей (чи будь-який інший) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності.
TIP
Cube Orange є наступником цього продукту. Ми проте рекомендуємо врахувати продукти, зроблені відповідно до стандартів галузі, таких як Стандарти Pixhawk. Цей контролер польоту не дотримується стандарту і використовує патентований роз'єм.
Контролер польоту Hex Cube Black (раніше відомий як Pixhawk 2.1) - це гнучкий автопілот, призначений в першу чергу для виробників комерційних систем. Він базується на відкритому апаратному дизайні Pixhawk-project FMUv3 та запускає PX4 на операційній системі NuttX OS.
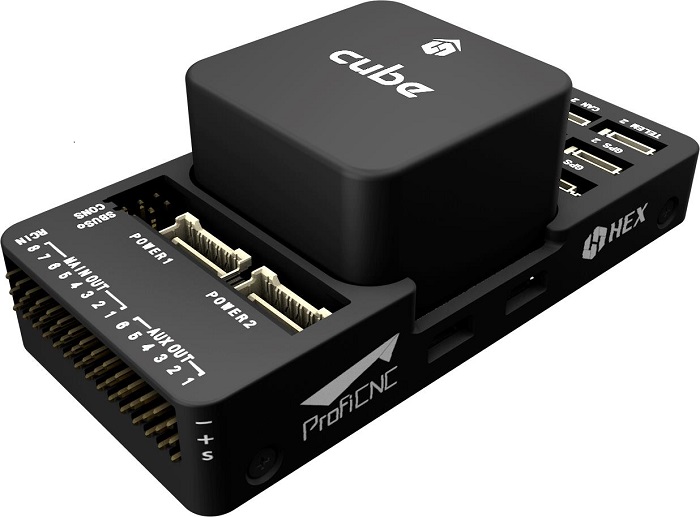
Контролер призначений для використання зі специфічною для домену несучою платою, щоб зменшити кількість дротів, підвищити надійність і спростити збірку. Наприклад, несуча плата для комерційного інспекційного апарату може містити з'єднання для комп'ютера-компаньйона, в той час як несуча плата для гонщика може включати ESC з рами транспортного засобу.
Cube має віброізоляцію на двох ІВП, з третім фіксованим ІВП в якості еталонного/резервного.
Документація ввід виробника Cube Docs містить детальну інформацію, включаючи огляд Різниць між Cube Colours.
TIP
Цей автопілот підтримується командами підтримки та тестування PX4.
Ключові особливості
- 32bit STM32F427 Cortex-M4F® ядро з FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (повністю доступна)
- 32 bit STM32F103 відмовостійкий співпроцесор
- 14 ШІМ / серво виходів (8 з відмовостійкими і ручним керуванням, 6 допоміжних, сумісних з великими потужностями)
- Широкі можливості підключення додаткових периферійних пристроїв (UART, I2C, CAN)
- Інтегрована система резервного копіювання для відновлення в польоті та ручного керування з виділеним процесором та автономним джерелом живлення (для літаків з фіксованим крилом)
- Резервна система інтегрує систему міксування, забезпечуючи узгоджені режими автопілота та ручного заміщення ( для літаків з фіксованим крилом)
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Зовнішній запобіжний вимикач
- Головний візуальний індикатор - мультиколірний світлодіод
- Потужний мультитональний п'єзозвуковий індикатор
- Карта microSD для високошвидкісної фіксації даних протягом тривалого періоду часу
Де придбати
Cube Black (ProfiCNC)
Збірка
Характеристики
Процесор
- 32bit STM32F427 Cortex M4 ядро з FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (повністю доступна)
- 32 bit STM32F103 відмовостійкий співпроцесор
Сенсори
- TBA
Інтерфейси
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку HW
- 2x CAN (один з внутрішнім 3.3В трансивером, один на конекторі розширювача)
- Spektrum DSM / DSM2 / DSM-X® Satellite сумісний вхід
- Futaba S.BUS® сумісний вхід і вивід
- Вхід сигналу PPM sum
- Вхід RSSI (PWM або напруга)
- I2C
- SPI
- 3.3В АЦП вхід
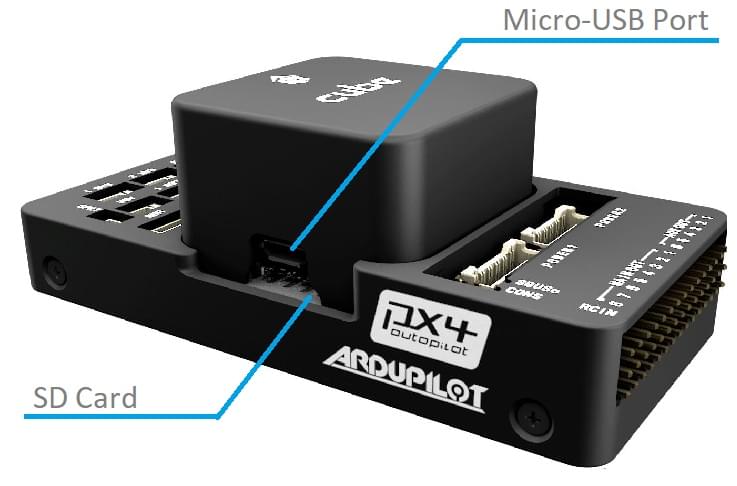
- Внутрішній порт microUSB і розширення зовнішнього порту microUSB
Система живлення та захист
- Ідеальний діодний контролер з автоматичним перемиканням на резервне живлення
- Сервопривід високої потужності (max. 10В) і сильного струму (10A+)
- Усі периферійні виводи захищені від перевантаження по струму, усі входи захищені від електростатичного розряду
Номінальна напруга
Pixhawk може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини: вхід модуля живлення, вхід сервоприводу, вхід USB.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи
- Вхід модуля живлення (4.8В до 5.4В)
- Вхід сервоприводу (4.8V to 5.4V) ДО 10В ДЛЯ РУЧНОГО ПЕРЕКЛЮЧЕННЯ, АЛЕ АВТОПІЛОТ БУДЕ ЗНЕЖИВЛЕНИЙ ВИЩЕ 5.7В, ЯКЩО ВХІД МОДУЛЯ ЖИВЛЕННЯ ВІДСУТНІЙ
- Вхід живлення USB (4.8В до 5.4В)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної енергії (не буде працювати), але залишиться неушкодженою.
- Вхід модуля живлення (4.1В до 5.7В, 0В до 20В неушкоджений)
- Вхід сервоприводу (4.1В до 5.7В, 0В до 20В)
- Вхід живлення USB (4.1В до 5.7В, 0В до 6В)
Розпіновки та схеми
Схеми плат та іншу документацію можна знайти тут: Проект Cube.
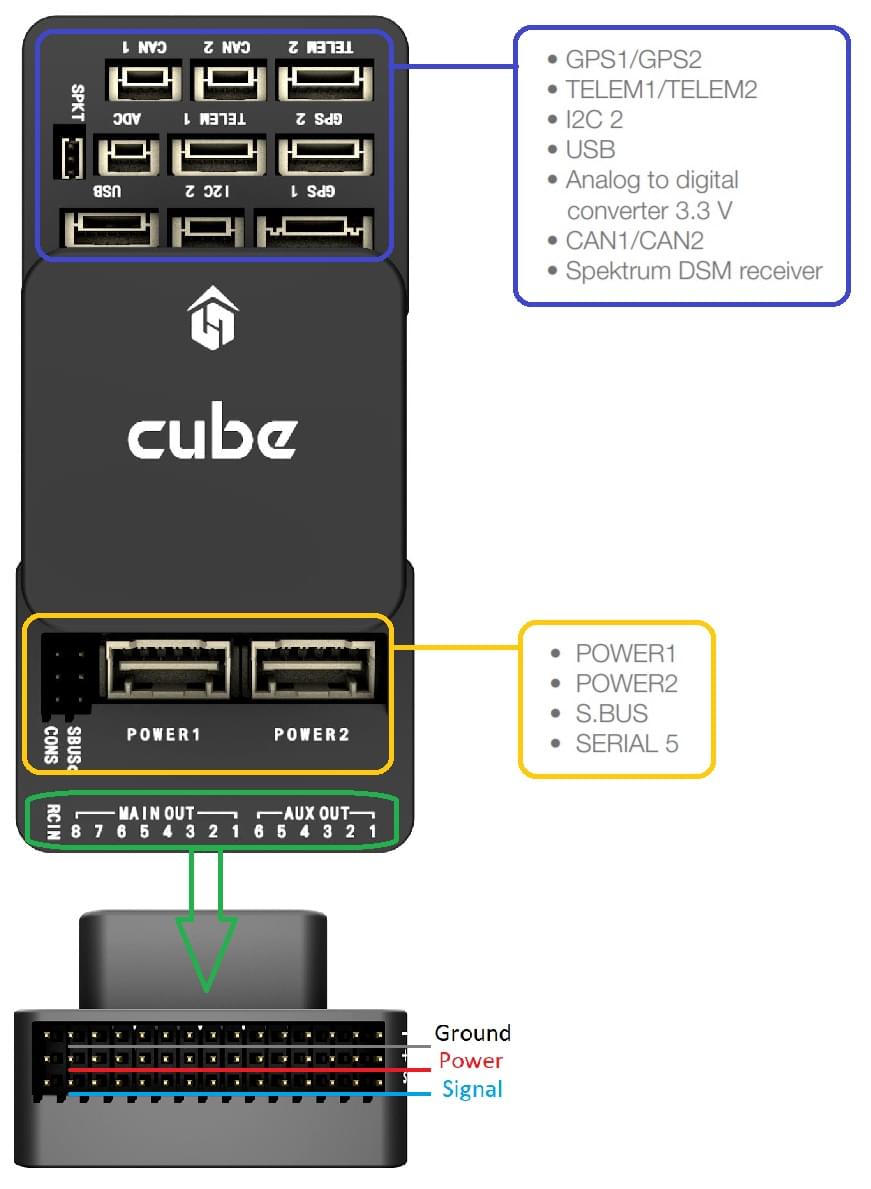
Порти
Верхня частина (GPS, TELEM тощо)
Зіставлення послідовних портів
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | CONSOLE |
| UART8 | /dev/ttyS6 |
Відладочні порти

Порти USB/SDCard
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана і автоматично встановлюється за допомогою QGroundControl при підключенні відповідного обладнання.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v3_defaultПроблеми
Розташування сілкскрінів CAN1 і CAN2 на Cube Black перевернуте (CAN1 - це CAN2 і навпаки).
Додаткова інформація/документація
- Швидке підключення Cube
- Cube Docs (виробник):