Автопілот CUAV V5+
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
V5+® is an advanced autopilot manufactured by CUAV®. Він був розроблений CUAV® у співпраці з командою PX4.
Автопілот рекомендується для комерційної системної інтеграції, але також підходить для академічних досліджень і будь-якого іншого використання.
Деякі з його основних функцій включають:
- Full compatibility with the Pixhawk project FMUv5 design standard and uses the Pixhawk Connector Standard for all external interfaces.
- Більш продуктивний процесор, оперативна пам'ять та флеш-пам'ять, ніж у FMU v3, разом із більш стабільними та надійними датчиками.
- Прошивка сумісна з PX4.
- Модульна конструкція дозволяє користувачам налаштовувати власну носійну плату.
- Вбудована система поглинання вібрації з високоефективною системою поглинання ударів.
- Множинні резервні датчики та системи живлення для покращення безпеки та стабільності польоту.
INFO
This flight controller is manufacturer supported.
Короткий опис
Головний FMU процесор: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
IO Processor: STM32F100
- 32 Bit Arm®️ Cortex®️-M3, 24MHz, 8KB SRAM
Бортові сенсори:
- Акселерометр/Гіроскоп: ICM-20689
- Акселерометр/Гіроскоп: BMI055
- Магнітометр: IST8310
- Барометр: MS5611
Інтерфейси:
- 8-14 PWM виходів (6 з IO, 8 з FMU)
- 3 виділених PWM/Capture входи на FMU
- Виділений R/C вхід для CPPM
- Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- аналоговий / PWM вхід RSSI
- Вихід сервоприводу S.Bus
- 5 загальних послідовних портів
- 4x I2C порти
- 4 шини SPI
- 2 CANBuses з послідовними ESC
- Аналогові входи для напруги / струму з 2 батарей
Система живлення:
- Живлення: 4.3~5.4В
- Вхід USB: 4.75~5.25В
Вага та розміри:
- Вага: 90г
- Розміри: 85.5*42*мм
Інші характеристики:
- Робоча температура: -20 ~ 80°c (виміряне значення)
Where to Buy
CUAV Aliexpress (International users)
CUAV Taobao (China Mainland users)
INFO
Autopilot may be purchased with included Neo GPS module
З'єднання (Проводка)
Схема розташування виводів
Download V5+ pinouts from here.
Номінальна напруга
V5+ AutoPilot supports redundant power supplies - up to three sources may be used: Power1, Power2 and USB. You must supply power to at least one of these sources, or the flight controller will be unpowered.
INFO
On FMUv5 based FMUs with PX4IO module (as is the case for the V5+), the Servo Power Rail is only monitored by the FMU. It is neither powered by, nor provides power to the FMU. However, the pins marked + are all common, and a BEC may be connected to any of the servo pin sets to power the servo power rail.
Normal Operation Maximum Ratings
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
Power1andPower2inputs (4.3V to 5.4V)USBinput (4.75V to 5.25V)
Захист від перенапруги
The V5+ has over current protection on the 5 Volt Peripheral and 5 Volt high power, which limits the current to 2.5A. The V5+ has short circuit protection.
WARNING
Up to 2.5 A can be delivered to the connectors listed as pin 1 (although these are only rated at 1 A).
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v5_defaultВідладочний порт
The PX4 System Console and SWD interface operate on the FMU Debug port (DSU7). Плата не має інтерфейсу відладки вводу/виводу.
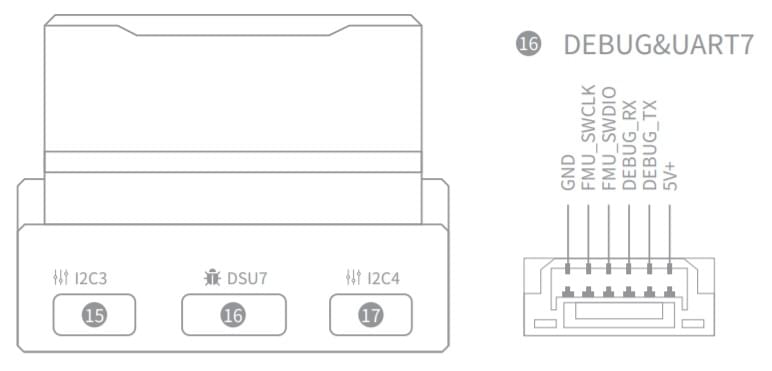
The debug port (DSU7) uses a JST BM06B connector and has the following pinout:
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | 5V+ | +5V |
| 2 (blk) | DEBUG TX (OUT) | +3.3V |
| 3 (blk) | DEBUG RX (IN) | +3.3V |
| 4 (blk) | FMU_SWDIO | +3.3V |
| 5 (blk) | FMU_SWCLK | +3.3V |
| 6 (blk) | GND | GND |
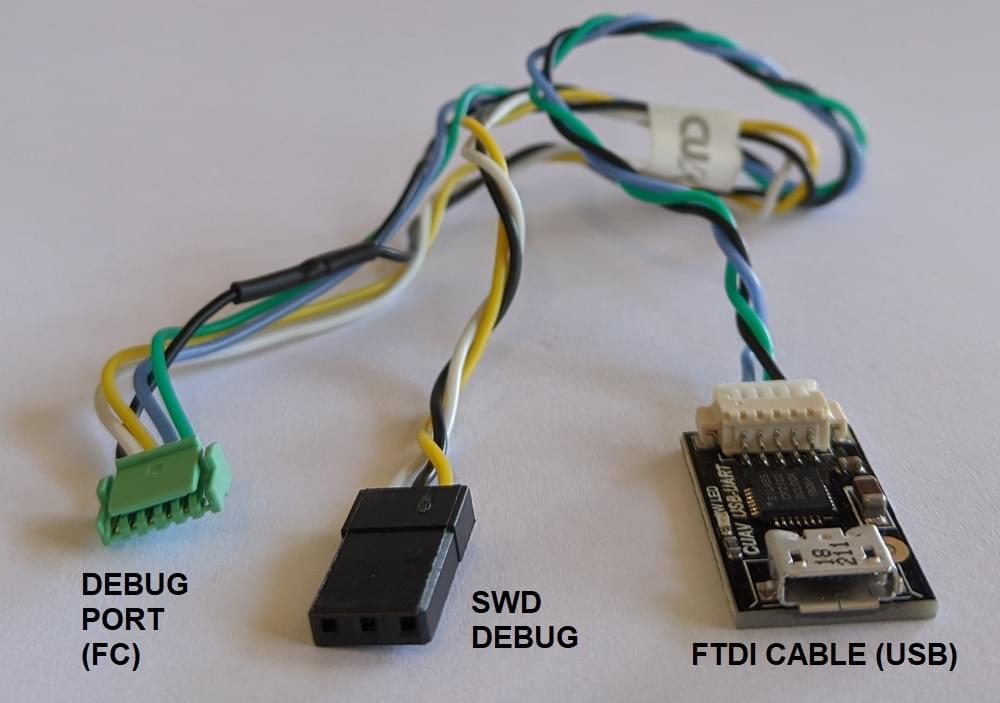
The product package includes a convenient debug cable that can be connected to the DSU7 port. This splits out an FTDI cable for connecting the PX4 System Console to a computer USB port, and SWD pins used for SWD/JTAG debugging. The provided debug cable does not connect to the SWD port Vref pin (1).
WARNING
The SWD Vref pin (1) uses 5V as Vref but the CPU is run at 3.3V!
Деякі JTAG-адаптери (SEGGER J-Link) використовують напругу Vref для встановлення напруги на лініях SWD. For direct connection to Segger Jlink we recommended you use the 3.3 Volts from pin 4 of the connector marked DSM/SBUS/RSSI to provide Vtref to the JTAG (i.e. providing 3.3V and NOT 5V).
For more information see Using JTAG for hardware debugging.
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX - RC-вхід з роз'єму SBUS_RC |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | PX4IO |
Периферійні пристрої
Підтримувані платформи / Конструкції
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. The complete set of supported configurations can be seen in the Airframes Reference.
Примітки
Do not plug Digital or Analog PM onto connectors configured for other type of PM
If you plug an Analog PM into a digital PM connector it will stop all the I2C devices on that bus. Specifically this will stop the GPS's compass due to contention, and may also damage the FMU (longer term).
Similarly, a digital PM plugged into a analog connector will not work, and may also damage/destroy the power module (longer term).
Сумісність
CUAV використовує деякі відмінні дизайни і несумісний з деяким обладнанням, про що буде описано нижче.
GPS not compatible with other devices
The Neo v2.0 GPS recommended for use with CUAV V5+ and CUAV V5 nano is not fully compatible with other Pixhawk flight controllers (specifically, the buzzer part is not compatible and there may be issues with the safety switch).
The UAVCAN NEO V2 PRO GNSS receiver can also be used, and is compatible with other flight controllers.
Використання JTAG для апаратного налагодження
DSU7 FMU Debug Pin 1 is 5 volts - not the 3.3 volts of the CPU.
Some JTAG adapters use this voltage to set the IO levels when communicating to the target.
For direct connection to Segger Jlink we recommended you use the 3.3 Volts of DSM/SBUS/RSSI pin 4 as Pin 1 on the debug connector (Vtref).
Відомі проблеми
The issues below refer to the batch number in which they first appear. Номер партії - це чотирицифрова дата виробництва за V01 та відображається на наклейці з боку контролера польоту. Наприклад, серійний номер партії V011904 ((V01 - це номер V5, 1904 - це дата виробництва, тобто номер партії).
Інтерфейс SBUS / DSM / RSSI Pin1 не захищений від перевантаження
WARNING
This is a safety issue.
Please do not connect other equipment (except RC receiver) on SBUS / DSM / RSSI interface - this may lead to equipment damage.
- Found: Batches V01190904xxxx
- Fixed: Batches later than V01190904xxxx