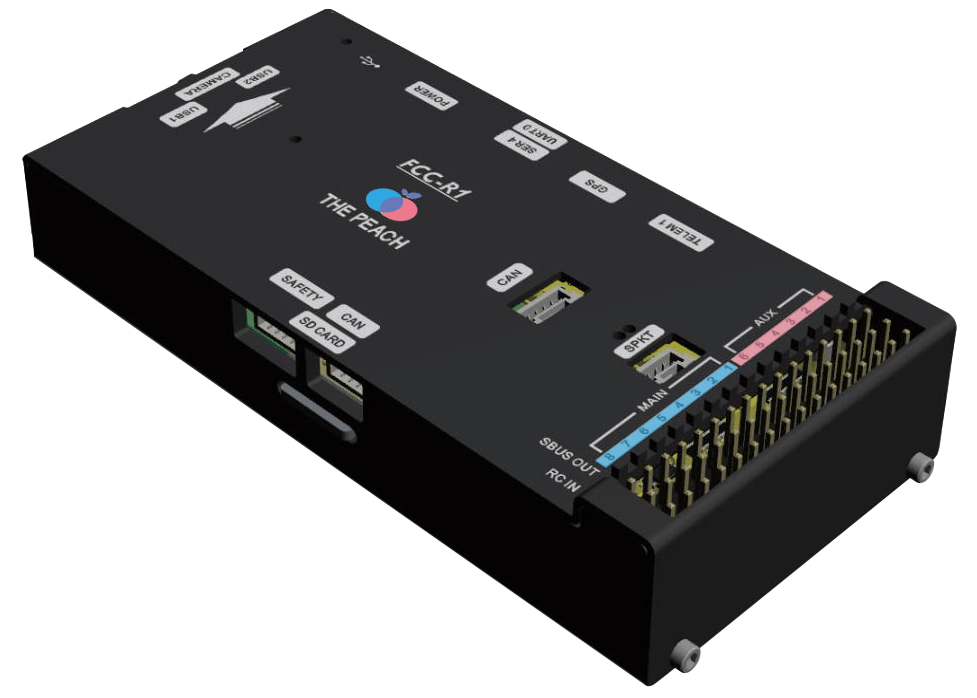
ThePeach FCC-R1
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
ThePeach FCC-R1 is an advanced autopilot designed and made in ThePeach.
It is based on the Pixhawk-project FMUv3 open hardware design and runs PX4 on Nuttx OS.
INFO
This flight controller is manufacturer supported.
Характеристики
Основний процесор: STM32F427VIT6
- 32-бітний ARM Cortex-M4, 168 МГц 256 КБ ОЗП 2 МБ флеш-пам'яті
IO процесор: STM32F100C8T6
- ARM Cortex-M3, 32 бітний ARM Cortex-M3, 24 МГц, 8КБ SRAM
Сенсори на платі
- Акселератор/гіроскоп: ICM-20602
- Акселератор/гіроскоп/Магнітометр: MPU-9250
- Барометр: MS5611
Інтерфейси
- 8+6 PWM виходів (8 з IO, 6 з FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite сумісний вхід
- Futaba S.BUS сумісний вхід та вихід
- Вхід сигналу PPM sum
- Аналоговий / PWM вхід RSSI
- Вихід сервоприводу S.Bus
- Запобіжний вимикач / LED
- 4x UART: TELEM1, TELEM2(Raspberry Pi CM3+), GPS, SERIAL4
- 1x I2C порт
- 1x CAN шина
- Аналогові входи для напруги / струму з 1 батареї
Інтерфейси для Raspberry Pi CM3+
- VBUS
- DDR2 Connector: Raspberry Pi CM3+
- 1x UART
- 2x USB
- 1x Raspberry Pi камера
Деталі механічної частини
- Розміри: 49.2 x 101 x 18.2мм
- Вага: 100g
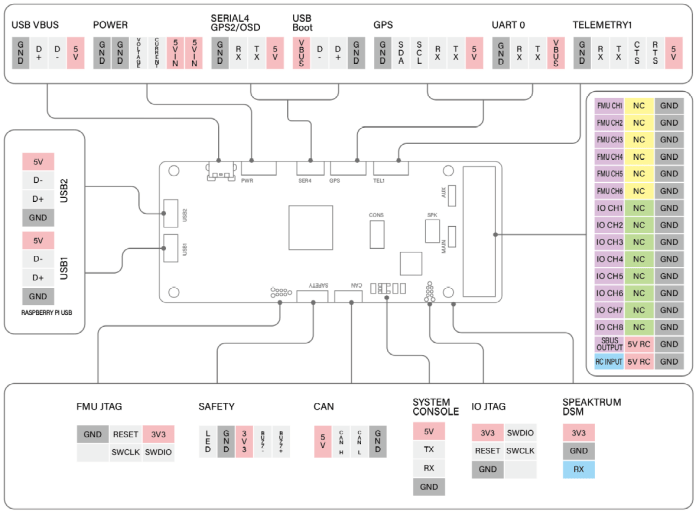
З’єднання
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | Відладка процесора вводу-виводу |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (Raspberry pi cm3+) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttys5 | Debug console |
| UART8 | /dev/ttyS6 | TELEM4 |
Номінальна напруга
ThePeach FCC-R1 can be double-redundant on the power supply if two power sources are supplied. The two power rails are: POWER and USB.
Примітка:
- The output power rails FMU PWM OUT and I/O PWM OUT do not power the flight controller board (and are not powered by it). You must supply power to one of POWER or USB or the board will be unpowered.
- The USB do not power the Raspberry Pi CM3+. You must supply power to POWER or the Raspberry Pi CM3+ will be unpowered.
Normal Operation Maximum Ratings
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER вхід (5В до 5.5В)
- USB вхід (4.75В до 5.25В)
Absolute Maximum Ratings
За таких умов всі джерела живлення спричиняють постійні пошкодження контролеру польоту.
POWER вхід (більше 5.5В)
USB вхід (більше 5.5В)
Збірка прошивки
Щоб зібрати PX4 для цього контролера:
make thepeach_r1_defaultДе купити
Order from ThePeach