Швидке підключення Holybro Pixhawk 5x
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
This quick start guide shows how to power the Pixhawk® 5X flight controller and connect its most important peripherals.

Набір Pixhawk 5 стандартний
Огляд схеми підключення
На зображенні нижче показано, як підключити найважливіші датчики та периферійні пристрої.
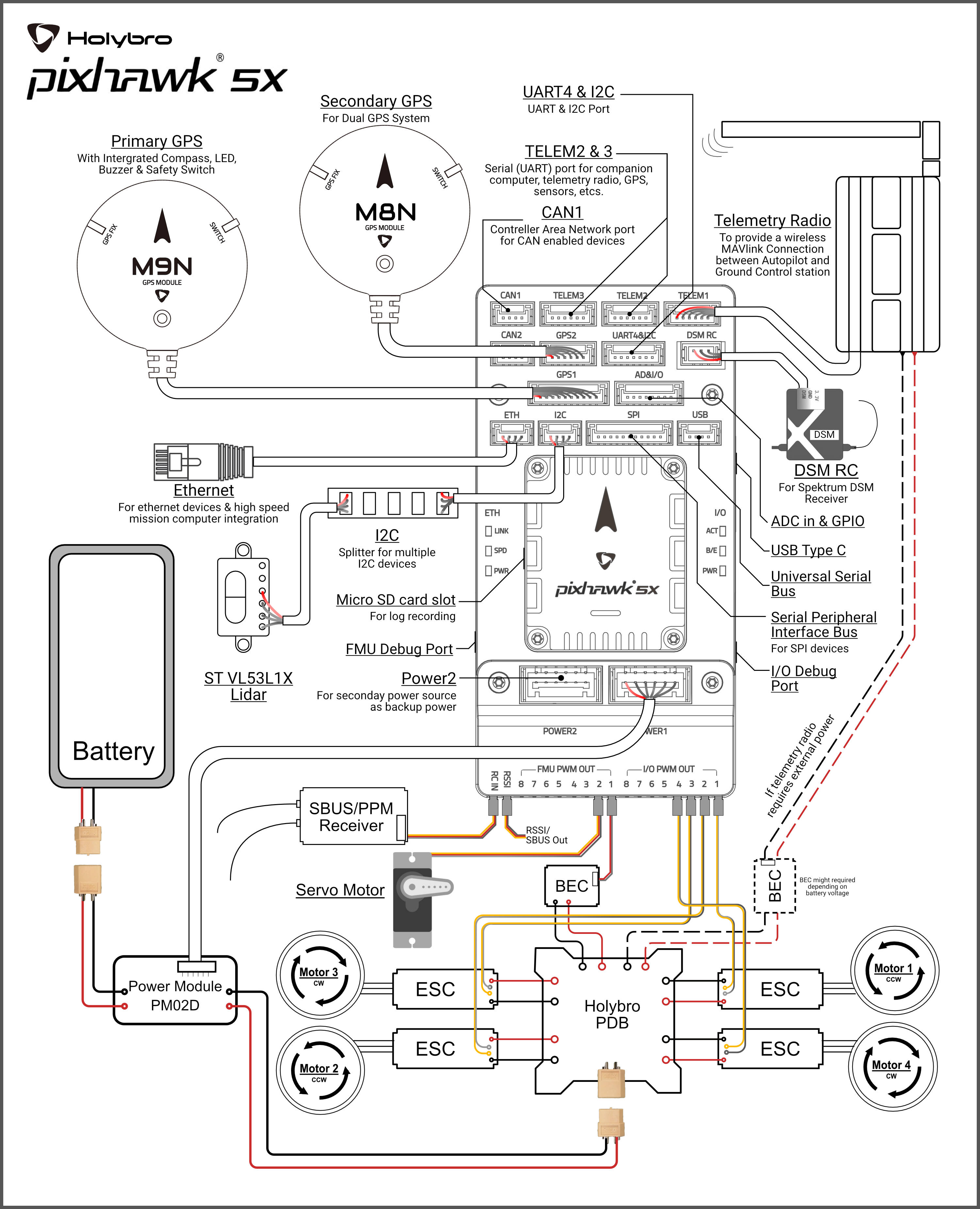
TIP
More information about available ports can be found here: Pixhawk 5X > Connections.
Монтаж та орієнтація контролера
Pixhawk 5X can be mounted on the frame using double side tape included in the kit. Вона повинна розташовуватися якомога ближче до центру тяжіння вашого апарату верхньою стороною вгору зі стрілкою, що вказує в напрямку передньої частини апарату.

INFO
Якщо контролер не може бути змонтований у рекомендованому/стандартному положенні (наприклад, через обмеження місця), вам потрібно буде налаштувати програмне забезпечення автопілота з орієнтацією, яку ви фактично використовували: Орієнтація контролера польоту.
GPS + компас + зумер + захисний вимикач + світлодіод
The Pixhawk5X Standard Set can be purchased with M8N or M9N GPS (10-pin connector) that should be connected to the GPS1 port. Ці модулі GNSS мають вбудований компас, безпечний перемикач, дзвіночок та світлодіод.
A secondary M8N or M9N GPS (6-pin connector) can be purchased separately and connected to the GPS2 port.
The GPS/Compass should be mounted on the frame as far away from other electronics as possible, with the direction marker towards the front of the vehicle (separating the compass from other electronics will reduce interference).

INFO
Вбудований безпечний вимикач в GPS-модулі увімкнений за замовчуванням (коли включений, PX4 не дозволить вам готувати до польоту). Щоб вимкнути безпеку, натисніть і утримуйте безпечний вимикач протягом 1 секунди. Ви можете натиснути безпечний вимикач знову, щоб увімкнути безпеку та відключити транспортний засіб (це може бути корисно, якщо, з якихось причин, ви не можете вимкнути транспортний засіб за допомогою вашого пульта дистанційного керування або наземної станції).
Power
Connect the output of the PM02D Power Module (PM board) that comes with the Standard Set to one of the POWER port of Pixhawk 5X using the 6-wire cable. The PM02D and Power ports on the Pixhawk 5X uses the 6 circuit 2.00mm Pitch CLIK-Mate Wire-to-Board PCB Receptacle & Housing.
The PM02D Power Module supports 2~6S battery, the board input should be connected to your LiPo battery. Note that the PM board does not supply power to the + and - pins of FMU PWM OUT and I/O PWM OUT.
If using a plane or rover, the FMU PWM-OUT will need to be separately powered in order to drive servos for rudders, elevons etc. This can be done by connecting the 8 pin power (+) rail of the FMU PWM-OUT to a voltage regulator (for example, a BEC equipped ESC or a standalone 5V BEC or a 2S LiPo battery).
INFO
Напруга шини живлення повинна бути відповідною для використаного сервоприводу!
| PIN & Connector | Функція |
|---|---|
| I/O PWM Out | Підключіть сигнальні та земельні проводи двигуна тут. |
| FMU PWM Out | Підключіть сигнальні, позитивні та GND-проводи сервоприводу сюди. |
INFO
MAIN outputs in PX4 firmware map to I/O PWM OUT port of Pixhawk 5X whereas AUX outputs map to FMU PWM OUT of Pixhawk 5x. For example, MAIN1 maps to IO_CH1 pin of I/O PWM OUT and AUX1 maps to FMU_CH1 pin of FMU PWM OUT.
The pinout of Pixhawk 5X’s power ports is shown below. Роз'єми живлення приймають цифровий сигнал I2C від модуля живлення PM02D для даних про напругу та силу струму. Лінії VCC повинні пропонувати принаймні 3A безперервного струму і за замовчуванням повинні мати напругу 5,2 В. Нижчий напруга 5V все ще прийнятний, але не рекомендується.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1(red) | VCC | +5V |
| 2(black) | VCC | +5V |
| 3(black) | SCL | +3.3V |
| 4(black) | SDA | +3.3V |
| 5(black) | GND | GND |
| 6(black) | GND | GND |
Радіоуправління
Для того щоб керувати транспортним засобом вручну, потрібна система радіоуправління (RC) (PX4 не потребує системи радіоуправління для автономних режимів польоту).
Вам потрібно вибрати сумісний передавач/приймач і зв'язати їх таким чином, щоб вони взаємодіяли (ознайомтеся з інструкціями, що додаються до вашого конкретного передавача/приймача).
- Spektrum/DSM receivers connect to the DSM/SBUS RC input.
- PPM or SBUS receivers connect to the RC IN input port.
PPM and PWM receivers that have an individual wire for each channel must connect to the RC IN port via a PPM encoder like this one (PPM-Sum receivers use a single signal wire for all channels).
Для отримання додаткової інформації про вибір радіосистеми, сумісність приймача та зв'язок вашої передавача/приймача, див. статтю: Пульт керування передавачів & приймачів.
Телеметричні радіостанції (Опціонально)
Телеметричні радіостанції можуть використовуватися для зв'язку та управління транспортним засобом у польоті з наземної станції (наприклад, ви можете направляти БПЛА до певної позиції або завантажувати нове завдання).
The vehicle-based radio should be connected to the TELEM1 port as shown below (if connected to this port, no further configuration is required). Інша радіостанція підключається до вашого комп'ютера або мобільного пристрою наземної станції (зазвичай за допомогою USB).
Radios are also available for purchase on Holybro's website .
SD-карта (Опціонально)
SD cards are highly recommended as they are needed to log and analyse flight details, to run missions, and to use UAVCAN-bus hardware. Insert the card (included in Pixhawk 5X kit) into Pixhawk 5X as shown below.

TIP
Для отримання додаткової інформації див. Основні концепції > SD-карти (знімна пам'ять).
Двигуни
Motors/servos are connected to the I/O PWM OUT (MAIN) and FMU PWM OUT (AUX) ports in the order specified for your vehicle in the Airframe Reference.
INFO
Цей довідник містить зіставлення портів виводу до моторів/сервоприводів для всіх підтримуваних повітряних та наземних шасі (якщо ваше шасі не вказане в довіднику, то використовуйте "загальний" планер відповідного типу).
WARNING
Відображення не є однорідним для всіх конструкцій (наприклад, ви не можете покладатися на те, що ручка газу буде на тому ж вихідному порту для всіх повітряних конструкцій). Переконайтеся, що ви використовуєте правильне зіставлення для вашого апарату.
Інші периферійні пристрої
Підключення та конфігурація додаткових/менш поширених компонентів описано в темах для окремих периферійних пристроїв.
Схема розташування виводів
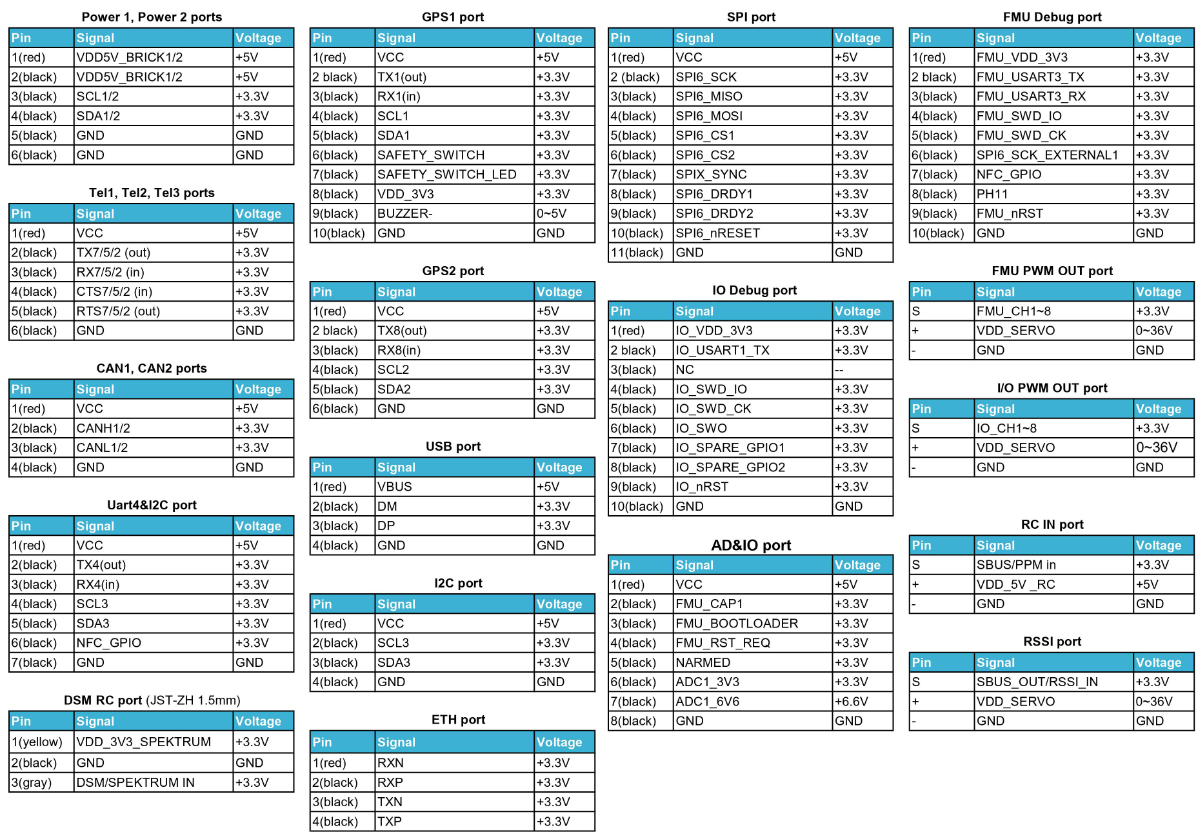
You can also download Pixhawk 5X pinouts from here or here.
Налаштування
Загальну інформацію про конфігурацію описано в: Конфігурація автопілота.
Конкретні конфігурації QuadPlane тут: QuadPlane VTOL налаштування
Подальша інформація
- Pixhawk 5X (PX4 Doc Overview page)
- Pixhawk 5X Overview & Specification (Holybro)
- Pixhawk 5X Pinouts (Holybro)
- FMUv5X reference design pinout.
- Pixhawk Autopilot FMUv5X Standard.
- Pixhawk Autopilot Bus Standard.
- Pixhawk Connector Standard.