Modules Reference: System
battery_simulator
Source: modules/simulation/battery_simulator
Опис
Usage
battery_simulator <command> [arguments...]
Commands:
start
stop
status print status infobattery_status
Source: modules/battery_status
Опис
The provided functionality includes:
- Read the output from the ADC driver (via ioctl interface) and publish
battery_status.
Імплементація
It runs in its own thread and polls on the currently selected gyro topic.
Usage
battery_status <command> [arguments...]
Commands:
start
stop
status print status infocamera_feedback
Source: modules/camera_feedback
Опис
The camera_feedback module publishes CameraCapture UORB topics when image capture has been triggered.
If camera capture is enabled, then trigger information from the camera capture pin is published; otherwise trigger information at the point the camera was commanded to trigger is published (from the camera_trigger module).
The CAMERA_IMAGE_CAPTURED message is then emitted (by streaming code) following CameraCapture updates. CameraCapture topics are also logged and can be used for geotagging.
Імплементація
CameraTrigger topics are published by the camera_trigger module (feedback field set false) when image capture is triggered, and may also be published by the camera_capture driver (with feedback field set true) if the camera capture pin is activated.
The camera_feedback module subscribes to CameraTrigger. It discards topics from the camera_trigger module if camera capture is enabled. For the topics that are not discarded it creates a CameraCapture topic with the timestamp information from the CameraTrigger and position information from the vehicle.
Usage
camera_feedback <command> [arguments...]
Commands:
start
stop
status print status infocdcacm_autostart
Source: drivers/cdcacm_autostart
Опис
This module listens on USB and auto-configures the protocol depending on the bytes received. The supported protocols are: MAVLink, nsh, and ublox serial passthrough. If the parameter SYS_USB_AUTO=2 the module will only try to start mavlink as long as the USB VBUS is detected. Otherwise it will spin and continue to check for VBUS and start mavlink once it is detected.
Usage
cdcacm_autostart <command> [arguments...]
Commands:
start
stop
status print status infocommander
Source: modules/commander
Опис
The commander module contains the state machine for mode switching and failsafe behavior.
Usage
commander <command> [arguments...]
Commands:
start
[-h] Enable HIL mode
calibrate Run sensor calibration
mag|baro|accel|gyro|level|esc|airspeed Calibration type
quick Quick calibration [mag, accel (not recommended)]
check Run preflight checks
safety Change prearm safety state
on|off [on] to activate safety, [off] to deactivate safety and allow
control surface movements
arm
[-f] Force arming (do not run preflight checks)
disarm
[-f] Force disarming (disarm in air)
takeoff
land
transition VTOL transition
mode Change flight mode
manual|acro|offboard|stabilized|altctl|posctl|altitude_cruise|position:slow
|auto:mission|auto:loiter|auto:rtl|auto:takeoff|auto:land|auto:
precland|ext1 Flight mode
pair
termination
on|off Turn lockdown on or off
set_ekf_origin
lat, lon, alt Origin Latitude, Longitude, Altitude
lat|lon|alt Origin latitude longitude altitude
set_heading Set current heading
heading degrees from True North [0 360]
poweroff Power off board (if supported)
stop
status print status infodataman
Source: modules/dataman
Опис
Module to provide persistent storage for the rest of the system in form of a simple database through a C API. Multiple backends are supported depending on the board:
- a file (eg. on the SD card)
- RAM (this is obviously not persistent)
It is used to store structured data of different types: mission waypoints, mission state and geofence polygons. Each type has a specific type and a fixed maximum amount of storage items, so that fast random access is possible.
Імплементація
Reading and writing a single item is always atomic.
Usage
dataman <command> [arguments...]
Commands:
start
[-f <val>] Storage file
values: <file>
[-r] Use RAM backend (NOT persistent)
The options -f and -r are mutually exclusive. If nothing is specified, a file
'dataman' is used
stop
status print status infodmesg
Source: systemcmds/dmesg
Опис
Command-line tool to show bootup console messages. Note that output from NuttX's work queues and syslog are not captured.
Приклади
Keep printing all messages in the background:
dmesg -f &Usage
dmesg <command> [arguments...]
Commands:
[-f] Follow: wait for new messagesesc_battery
Source: modules/esc_battery
Опис
This implements using information from the ESC status and publish it as battery status.
Usage
esc_battery <command> [arguments...]
Commands:
start
stop
status print status infogyro_calibration
Source: modules/gyro_calibration
Опис
Simple online gyroscope calibration.
Usage
gyro_calibration <command> [arguments...]
Commands:
start
stop
status print status infogyro_fft
Source: modules/gyro_fft
Опис
Usage
gyro_fft <command> [arguments...]
Commands:
start
stop
status print status infohardfault_stream
Source: modules/hardfault_stream
Опис
Background process that streams the latest hardfault via MAVLink.
The module is especially useful when it is necessary to quickly push a hard fault to the ground station. This is useful in cases where the drone experiences a hard fault during flight. It ensures that some data is retained in case the permanent storage is destroyed during a crash.
To reliably stream, it is necessary to send the STATUSTEXT message via MAVLink at a high enough frequency. The recommended frequency is 10 Hz or higher.
Usage
hardfault_stream <command> [arguments...]
Commands:
start Start the background task
stop
status print status infoheater
Source: drivers/heater
Опис
Background process running periodically on the INS{i} queue to regulate IMU temperature at a setpoint.
This task can be started at boot from the startup scripts by setting SENS_EN_THERMAL or via CLI.
Usage
heater <command> [arguments...]
Commands:
start
stop
status print status infoi2c_launcher
Source: systemcmds/i2c_launcher
Опис
Daemon that starts drivers based on found I2C devices.
Usage
i2c_launcher <command> [arguments...]
Commands:
start
-b <val> Bus number
-t <val> battery index for calibration values (1 or 3)
stop
status print status infointernal_combustion_engine_control
Source: modules/internal_combustion_engine_control
Опис
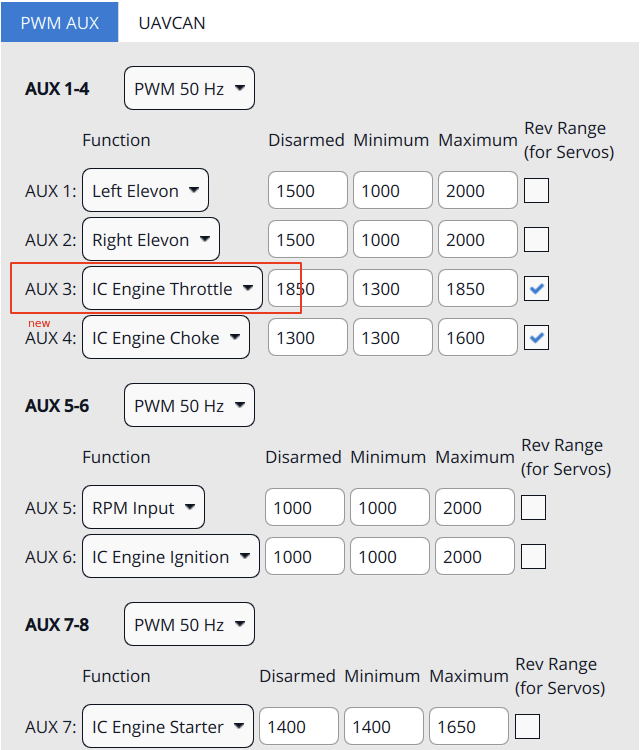
The module controls internal combustion engine (ICE) features including: ignition (on/off), throttle and choke level, starter engine delay, and user request.
Enabling
This feature is not enabled by default needs to be configured in the build target for your board together with the rpm capture driver:
CONFIG_MODULES_INTERNAL_COMBUSTION_ENGINE_CONTROL=y
CONFIG_DRIVERS_RPM_CAPTURE=yAdditionally, to enable the module:
- Set ICE_EN to true and adjust the other
ICE_module parameters according to your needs. - Set RPM_CAP_ENABLE to true.
The module outputs control signals for ignition, throttle, and choke, and takes inputs from an RPM sensor. These must be mapped to AUX outputs/inputs in the Actuator configuration, similar to the setup shown below.
Імплементація
The ICE is implemented with a (4) state machine:
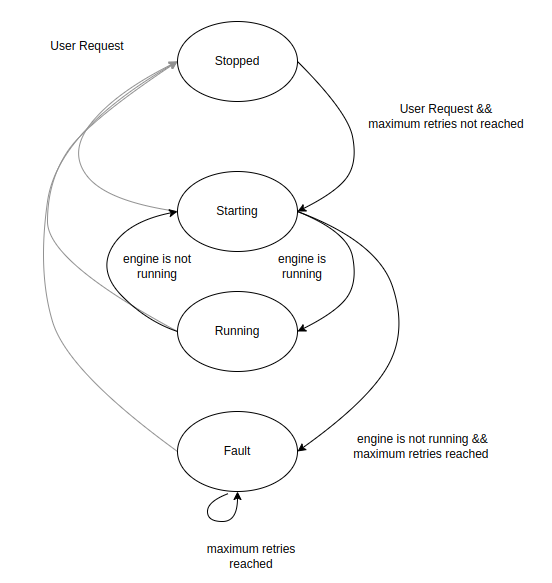
The state machine:
- Checks if Rpm.msg is updated to know if the engine is running
- Allows for user inputs from:
- Manual control AUX
- Arming state in VehicleStatus.msg
- In the state "Stopped" the throttle is set to NAN, which by definition will set the throttle output to the disarmed value configured for the specific output.
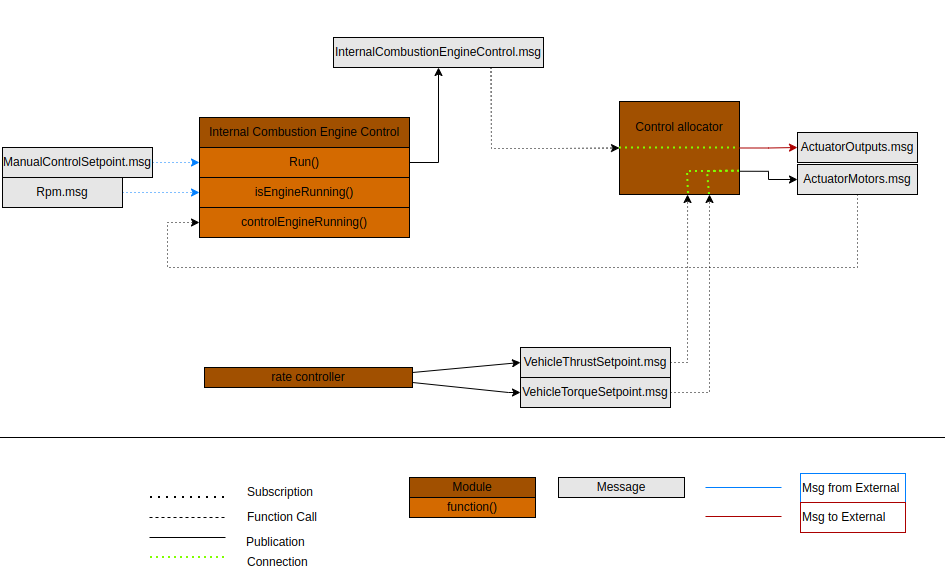
The module publishes InternalCombustionEngineControl.msg.
The architecture is as shown below:
Usage
internal_combustion_engine_control <command> [arguments...]
Commands:
start
stop
status print status infoland_detector
Source: modules/land_detector
Опис
Module to detect the freefall and landed state of the vehicle, and publishing the vehicle_land_detected topic. Each vehicle type (multirotor, fixedwing, vtol, ...) provides its own algorithm, taking into account various states, such as commanded thrust, arming state and vehicle motion.
Імплементація
Every type is implemented in its own class with a common base class. The base class maintains a state (landed, maybe_landed, ground_contact). Each possible state is implemented in the derived classes. A hysteresis and a fixed priority of each internal state determines the actual land_detector state.
Multicopter Land Detector
ground_contact: thrust setpoint and velocity in z-direction must be below a defined threshold for time GROUND_CONTACT_TRIGGER_TIME_US. When ground_contact is detected, the position controller turns off the thrust setpoint in body x and y.
maybe_landed: it requires ground_contact together with a tighter thrust setpoint threshold and no velocity in the horizontal direction. The trigger time is defined by MAYBE_LAND_TRIGGER_TIME. When maybe_landed is detected, the position controller sets the thrust setpoint to zero.
landed: it requires maybe_landed to be true for time LAND_DETECTOR_TRIGGER_TIME_US.
The module runs periodically on the HP work queue.
Usage
land_detector <command> [arguments...]
Commands:
start Start the background task
fixedwing|multicopter|vtol|rover|airship Select vehicle type
stop
status print status infoload_mon
Source: modules/load_mon
Опис
Background process running periodically on the low priority work queue to calculate the CPU load and RAM usage and publish the cpuload topic.
On NuttX it also checks the stack usage of each process and if it falls below 300 bytes, a warning is output, which will also appear in the log file.
Usage
load_mon <command> [arguments...]
Commands:
start Start the background task
stop
status print status infologger
Source: modules/logger
Опис
System logger which logs a configurable set of uORB topics and system printf messages (PX4_WARN and PX4_ERR) to ULog files. These can be used for system and flight performance evaluation, tuning, replay and crash analysis.
It supports 2 backends:
- Files: write ULog files to the file system (SD card)
- MAVLink: stream ULog data via MAVLink to a client (the client must support this)
Both backends can be enabled and used at the same time.
The file backend supports 2 types of log files: full (the normal log) and a mission log. The mission log is a reduced ulog file and can be used for example for geotagging or vehicle management. It can be enabled and configured via SDLOG_MISSION parameter. The normal log is always a superset of the mission log.
Імплементація
The implementation uses two threads:
- The main thread, running at a fixed rate (or polling on a topic if started with -p) and checking for data updates
- The writer thread, writing data to the file
In between there is a write buffer with configurable size (and another fixed-size buffer for the mission log). It should be large to avoid dropouts.
Приклади
Typical usage to start logging immediately:
logger start -e -tOr if already running:
logger onUsage
logger <command> [arguments...]
Commands:
start
[-m <val>] Backend mode
values: file|mavlink|all, default: all
[-x] Enable/disable logging via Aux1 RC channel
[-a] Log 1st armed until shutdown
[-e] Enable logging right after start until disarm (otherwise only
when armed)
[-f] Log until shutdown (implies -e)
[-t] Use date/time for naming log directories and files
[-r <val>] Log rate in Hz, 0 means unlimited rate
default: 280
[-b <val>] Log buffer size in KiB
default: 12
[-p <val>] Poll on a topic instead of running with fixed rate (Log rate
and topic intervals are ignored if this is set)
values: <topic_name>
[-c <val>] Log rate factor (higher is faster)
default: 1.0
on start logging now, override arming (logger must be running)
off stop logging now, override arming (logger must be running)
trigger_watchdog manually trigger the watchdog now
stop
status print status infomag_bias_estimator
Source: modules/mag_bias_estimator
Опис
Online magnetometer bias estimator.
Usage
mag_bias_estimator <command> [arguments...]
Commands:
start Start the background task
stop
status print status infomanual_control
Source: modules/manual_control
Опис
Module consuming manual_control_inputs publishing one manual_control_setpoint.
Usage
manual_control <command> [arguments...]
Commands:
start
stop
status print status infonetman
Source: systemcmds/netman
Опис
Network configuration manager saves the network settings in non-volatile memory. On boot the update option will be run. If a network configuration does not exist. The default setting will be saved in non-volatile and the system rebooted.
update
netman update is run automatically by a startup script. When run, the update option will check for the existence of net.cfg in the root of the SD Card. It then saves the network settings from net.cfg in non-volatile memory, deletes the file and reboots the system.
save
The save option will save settings from non-volatile memory to a file named net.cfg on the SD Card filesystem for editing. Use this to edit the settings. Save does not immediately apply the network settings; the user must reboot the flight stack. By contrast, the update command is run by the start-up script, commits the settings to non-volatile memory, and reboots the flight controller (which will then use the new settings).
show
The show option will display the network settings in net.cfg to the console.
Приклади
$ netman save # Save the parameters to the SD card. $ netman show # display current settings. $ netman update -i eth0 # do an update
Usage
netman <command> [arguments...]
Commands:
show Display the current persistent network settings to the console.
update Check SD card for net.cfg and update network persistent network
settings.
save Save the current network parameters to the SD card.
[-i <val>] Set the interface name
default: eth0pwm_input
Source: drivers/pwm_input
Опис
Measures the PWM input on AUX5 (or MAIN5) via a timer capture ISR and publishes via the uORB 'pwm_input` message.
Usage
pwm_input <command> [arguments...]
Commands:
start
stop
status print status inforc_update
Source: modules/rc_update
Опис
The rc_update module handles RC channel mapping: read the raw input channels (input_rc), then apply the calibration, map the RC channels to the configured channels & mode switches and then publish as rc_channels and manual_control_input.
Імплементація
To reduce control latency, the module is scheduled on input_rc publications.
Usage
rc_update <command> [arguments...]
Commands:
start
stop
status print status inforeplay
Source: modules/replay
Опис
This module is used to replay ULog files.
There are 2 environment variables used for configuration: replay, which must be set to an ULog file name - it's the log file to be replayed. The second is the mode, specified via replay_mode:
replay_mode=ekf2: specific EKF2 replay mode. It can only be used with the ekf2 module, but allows the replay to run as fast as possible.- Generic otherwise: this can be used to replay any module(s), but the replay will be done with the same speed as the log was recorded.
The module is typically used together with uORB publisher rules, to specify which messages should be replayed. The replay module will just publish all messages that are found in the log. It also applies the parameters from the log.
The replay procedure is documented on the System-wide Replay page.
Usage
replay <command> [arguments...]
Commands:
start Start replay, using log file from ENV variable 'replay'
trystart Same as 'start', but silently exit if no log file given
tryapplyparams Try to apply the parameters from the log file
stop
status print status infosend_event
Source: modules/events
Опис
Background process running periodically on the LP work queue to perform housekeeping tasks. It is currently only responsible for tone alarm on RC Loss.
The tasks can be started via CLI or uORB topics (vehicle_command from MAVLink, etc.).
Usage
send_event <command> [arguments...]
Commands:
start Start the background task
stop
status print status infosensor_agp_sim
Source: modules/simulation/sensor_agp_sim
Опис
Module to simulate auxiliary global position measurements with optional failure modes for SIH simulation.
Usage
sensor_agp_sim <command> [arguments...]
Commands:
start
stop
status print status infosensor_arispeed_sim
Source: modules/simulation/sensor_airspeed_sim
Опис
Usage
sensor_arispeed_sim <command> [arguments...]
Commands:
start
stop
status print status infosensor_baro_sim
Source: modules/simulation/sensor_baro_sim
Опис
Usage
sensor_baro_sim <command> [arguments...]
Commands:
start
stop
status print status infosensor_gps_sim
Source: modules/simulation/sensor_gps_sim
Опис
Usage
sensor_gps_sim <command> [arguments...]
Commands:
start
stop
status print status infosensor_mag_sim
Source: modules/simulation/sensor_mag_sim
Опис
Usage
sensor_mag_sim <command> [arguments...]
Commands:
start
stop
status print status infosensors
Source: modules/sensors
Опис
The sensors module is central to the whole system. It takes low-level output from drivers, turns it into a more usable form, and publishes it for the rest of the system.
The provided functionality includes:
- Read the output from the sensor drivers (
SensorGyro, etc.). If there are multiple of the same type, do voting and failover handling. Then apply the board rotation and temperature calibration (if enabled). And finally publish the data; one of the topics isSensorCombined, used by many parts of the system. - Make sure the sensor drivers get the updated calibration parameters (scale & offset) when the parameters change or on startup. The sensor drivers use the ioctl interface for parameter updates. For this to work properly, the sensor drivers must already be running when
sensorsis started. - Do sensor consistency checks and publish the
SensorsStatusImutopic.
Імплементація
It runs in its own thread and polls on the currently selected gyro topic.
Usage
sensors <command> [arguments...]
Commands:
start
[-h] Start in HIL mode
stop
status print status infosystem_power_simulation
Source: modules/simulation/system_power_simulator
Опис
Usage
system_power_simulation <command> [arguments...]
Commands:
start
stop
status print status infotask_watchdog
Source: modules/task_watchdog
Опис
Detects when a higher-priority task starves the system by running too long. When starvation is detected, dumps the offending task's registers and stack, and saves a cpuload snapshot.
Usage
task_watchdog <command> [arguments...]
Commands:
start
trigger Manually trigger the watchdog
stop
status print status infotattu_can
Source: drivers/tattu_can
Опис
Driver for reading data from the Tattu 12S 16000mAh smart battery.
Usage
tattu_can <command> [arguments...]
Commands:
start
stop
status print status infotemperature_compensation
Source: modules/temperature_compensation
Опис
The temperature compensation module allows all of the gyro(s), accel(s), and baro(s) in the system to be temperature compensated. The module monitors the data coming from the sensors and updates the associated sensor_correction topic whenever a change in temperature is detected. The module can also be configured to perform the coeffecient calculation routine at next boot, which allows the thermal calibration coeffecients to be calculated while the vehicle undergoes a temperature cycle.
Usage
temperature_compensation <command> [arguments...]
Commands:
start Start the module, which monitors the sensors and updates the
sensor_correction topic
calibrate Run temperature calibration process
[-a] calibrate the accel
[-g] calibrate the gyro
[-m] calibrate the mag
[-b] calibrate the baro (if none of these is given, all will be
calibrated)
stop
status print status infotime_persistor
Source: modules/time_persistor
Опис
Writes the RTC time cyclically to a file and reloads this value on startup. This allows monotonic time on systems that only have a software RTC (that is not battery powered). Explicitly setting the time backwards (e.g. via system_time) is still possible.
Usage
time_persistor <command> [arguments...]
Commands:
start
stop
status print status infotune_control
Source: systemcmds/tune_control
Опис
Command-line tool to control & test the (external) tunes.
Tunes are used to provide audible notification and warnings (e.g. when the system arms, gets position lock, etc.). The tool requires that a driver is running that can handle the tune_control uorb topic.
Information about the tune format and predefined system tunes can be found here: https://github.com/PX4/PX4-Autopilot/blob/main/src/lib/tunes/tune_definition.desc
Приклади
Play system tune #2:
tune_control play -t 2Usage
tune_control <command> [arguments...]
Commands:
play Play system tune or single note.
error Play error tune
[-t <val>] Play predefined system tune
default: 1
[-f <val>] Frequency of note in Hz (0-22kHz)
[-d <val>] Duration of note in us
[-s <val>] Volume level (loudness) of the note (0-100)
default: 40
[-m <val>] Melody in string form
values: <string> - e.g. "MFT200e8a8a"
libtest Test library
stop Stop playback (use for repeated tunes)uxrce_dds_client
Source: modules/uxrce_dds_client
Опис
UXRCE-DDS Client used to communicate uORB topics with an Agent over serial or UDP.
Приклади
uxrce_dds_client start -t serial -d /dev/ttyS3 -b 921600
uxrce_dds_client start -t udp -h 127.0.0.1 -p 15555Usage
uxrce_dds_client <command> [arguments...]
Commands:
start
[-t <val>] Transport protocol
values: serial|udp, default: udp
[-d <val>] serial device
values: <file:dev>
[-b <val>] Baudrate (can also be p:<param_name>)
default: 0
[-h <val>] Agent IP. If not provided, defaults to UXRCE_DDS_AG_IP
values: <IP>
[-p <val>] Agent listening port. If not provided, defaults to
UXRCE_DDS_PRT
[-n <val>] Client DDS namespace. If not provided but UXRCE_DDS_NS_IDX is
between 0 and 9999 inclusive, then uav_ + UXRCE_DDS_NS_IDX will
be used
stop
status print status infowork_queue
Source: systemcmds/work_queue
Опис
Command-line tool to show work queue status.
Usage
work_queue <command> [arguments...]
Commands:
start
stop
status print status info